Изобретение относится к области автоматического управления электрическим приводом постоянного тока и может применяться для управления электроприводом драглайна.
Известен способ управления электроприводом драглайна, заключающийся в определении длительности цикла, установившихся скоростей и формировании управляющих сигналов. Недостатком этого способа является его сложность 1 .
Наиболее близким -по технической сущности является способ заключающийся в том, что изменяют длины подъемного и тягового канатов и подают управляющий сигнал в систему управления приводом тяги в функции длин каналов 2.
Недостатком этого способа является низкая надежность управления в результате того, что положение траектории подъема ковша относительно стрелы зависит от точки отрыва, ковща, а т. к. эти траектории являются кривыми 2-го порядка, следовательно при подъеме ковща из дальней точки он может попасть в зону саморазгрузки.
Для исключения это.го ковщ необходимо подтягивать ближе .к блокам наводки, что отрицательно скажется на производительности машины.
К другим недостаткам известного способа относится его сложность, так как для его реализации требуются достаточно громоздкие и сложные устройства, что в конечном итоге увеличивает его стоимость.
Целью настоящего изобретения является повыщение производительности маппвды и надежности управления.
Поставленная цель достигается тем, что одновременно определяют сигналы отклонения подъемного и тягового канатов от заданной точки разгрузки ковща и форм.ирует управляющий сигнал на привод тяги по зависимости:
А К-Д«п Д-гт,
где А-управляющий сигнал;
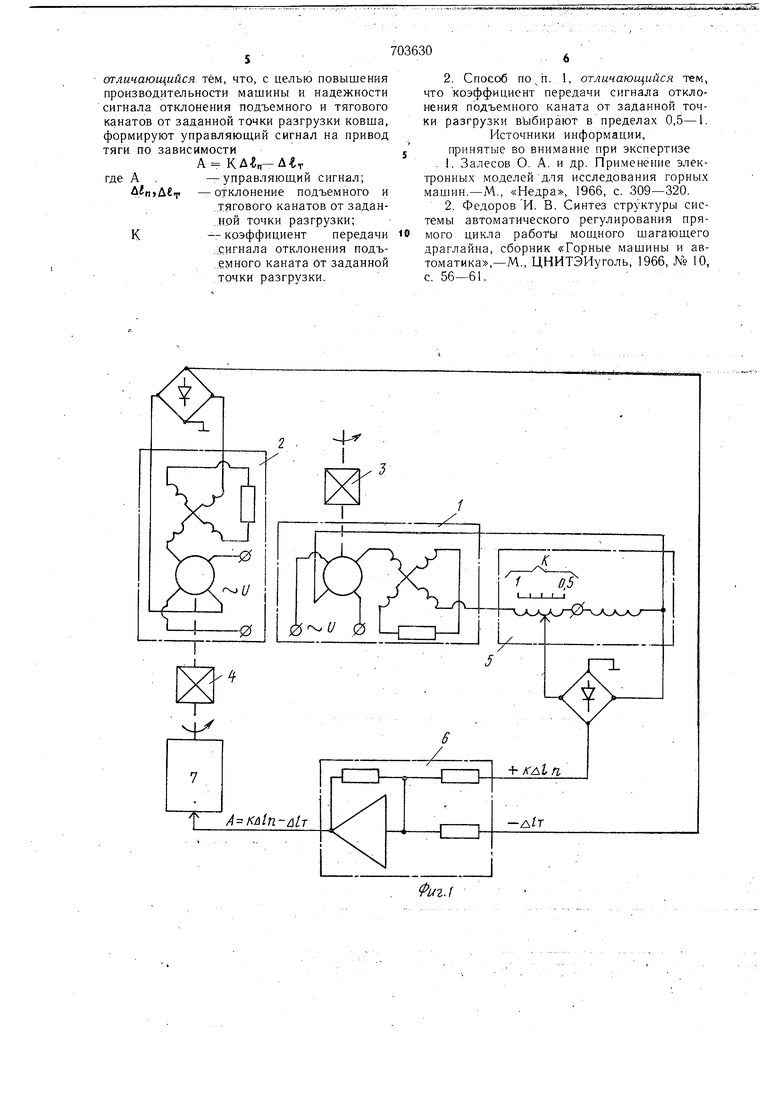
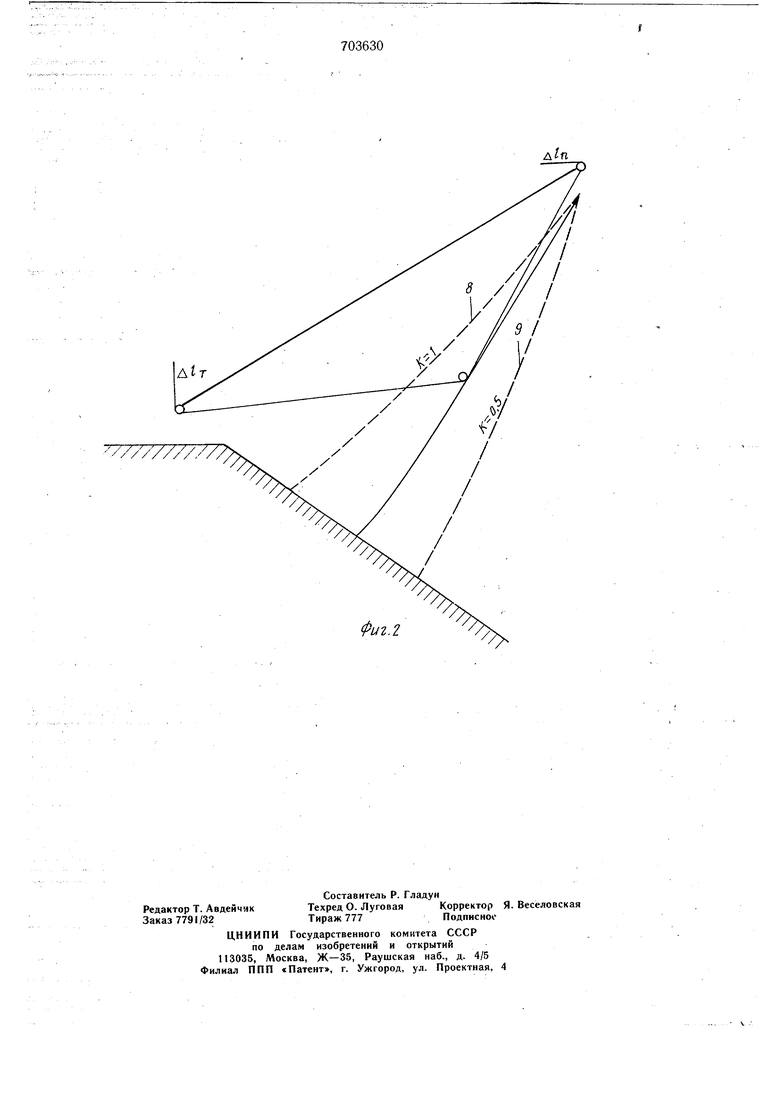
-отклонение соотвественпо подъемного и тягового канатов от заданной точки разгрузки; К- коэффициент передачи - -сигнала отклонения подъ емного каната от заданной точки разгрузки; при этом коэффициент передачи сигнала отклонения подъемного каната от заданной точки разгрузки выбирают в пределах 0,5-1. Сущность изобретения заключается в следующем. Одновременно измеряют два сигнала. Один сигнал пропорционален отклонению тягового каната от заданной точки разгрузки ковща. Другой сигнал пропорционален отклонению подъемного каната от той же точки разгрузки ковща. При этом для задания положения траекторий подъема ковща относительно стрелы изменяют коэффициент передачи последнего сигнала в огра, ничейном диапазоне. После этого путем суммирования указанных двух сигналов с противопоставленными знаками формируют управляющий сигнал, который подают в систему управления приводом тяги, осуществляя тем самым автоматический подъем ковща по выбранной траектории. Указаннь й коэффициент передачи выбирают в преде гах 0,5-1. Алгорит.м управления имеет следующее выражение: А -- КД-Вп-Aг, где Д-t,, А -отклонение подъемного и тягового канатов от заданной : точки разгрузки; .К .. - коэффициент передачи выходного сигнала датчика отклонения подъемного каната от заданной точки разгрузки; А ., -управляющий сигнал. На фиг. 1 - схема устройства, реализующего способ управления электроприводом тяги драглайн.а, на фиг. 2 - реализуемые по способу траектории подъемного ковща. Устройство включает в себя датчик 1, 2 отклонения подъемного и тягового канатов от заданной точки разгрузки, соединенные с валами соответствующих лебедок чер,ез понижающие редукторы 3, 4; элемент 5 для иаменения коэффициента передачи выходного сигнала датчика 1 и блок суммирования 6, выход которого подключен к управляющим цепям привода тяги 7. .. В качестве датчиков 1, 2 можно использовать линейные вращающиеся трансформаторы или аналогичные элементы измеряющие угловые перемещения. Элемент 5 устанавливается на пульте управления и может выпс)лняться на базе любого элемента, осуществляющего изменение коэффициёнта передачи проходящего через него сигнала. Например, автотрансформатор или потенциометр. Блок суммирования выполняется на базе стандартного- Операционного усилителя. Изменением коэффициента передачи К можно изменять положение траекторий в рабочей зоне от наиболее близкой к стреле (вдоль границы зоны растЯжки - траектории 8) до наиболее удаленной от стрелы (вдоль границы зоны разгрузки - траектории 9). Траектория приближается к стреле при увеличении коэффициента К и удаляется от стрелы при его уменьщении. Положению траекторий в рабочей зоне соответствуют значения коэффициента передачи первого сигнала К в пределах О,5- 1, что практически для всех типов драглайнов обеспечивает надежное положение траекторий в пределах рабочей зоны. Настраивается система в точке разгрузки ковща путем установления нулевого управляющего сигнала на выходе блока суммирования 6 соответствующей установкой датчиков 1, 2. В начале подъема ковща привод подъема 9 включается на макси.мальную скорость, обеспечивая при этом минимальное время подъема независимо от положения ковща в забой, а привод тяги 7 автоматически обеспечивает перемещение ковша к заданной траектории и дальнейшее движение по ней без вмещательства мащиниста Если в процессе подъема ковща к месту разгрузки происходит отклонение ковща от заданной траектории, то на выходе блока суммирования 6 появляется сигнал, управляющий приводом тяги таким образом, что ковщ возвращается на заданную траекторию с точностью, определяющейся статизмом системы. Настоящий способ управления выгодно отличается от. известных своей простотой, так как упрощается получение и преобразование сигналов, а вследствие этого существенно упрощается реализация и требуется значительно меньшее количество эле.ментов. Использование способа управления электрическим приводом тяги драглайна обеспечивает по сравнению с существующими способами следуюнХие преимущества. повышение надежности управления за счет исключения выхода ковща за пределы рабочей зоны; например-в зону саморазгрузки;поддержание максимальной производительности мащины за счет того, что подъем ковща всегда можно осуществить с максимальной скоростью в любых условиях (близкий к стреле отвал, ночью, в тумане), что дает экономию в народном хозяйстве. Формула изобретения , - S 1. Способ управления электрическим приводом тяги драглайна путем измерения длин подъемного и тягового канатов и подачи управляющего сигнала в систему управления приводом тяги в функции длин канатов.
отличающийся тем, что, с целью повышения производительности машины и надежности сигнала отклонения подъемного и тягового канатов от заданной точки разгрузки ковша, формируют управляюш,ий сигнал на привод тяги по зависимости
А
-улравляюш,ий сигнал;
где А .
- отклонение подъемного и ,тягового канатов от задан..ной точки разгрузки;
-коэффициент передачи
К ..сигнала отклонения подъ.емного каната от заданной точки разгрузки.
2. Способ . 1, отличающийся тем, что коэффициент передачи сигнала отклонения подъемного каната от заданной точки разгрузки выбирают в пределах 0,5-1.
Источники информации, принятые во внимание при экспертизе . 1. Залесов О. А. и др. Применение электронных моделей-для исследования горны.х машин.-М., «Недра, 1966, с. 309-320.
2. ФедоровИ. В. Синтез структуры системы автоматического регулирования прямого цикла работы мощного шагаюшего драглайна, сборник «Горные машины и автоматика,-М., ЦНИТЭИуголь, 1966, № 10, с. 56-61..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| Способ взаимного регулирования электроприводами подъема и тяги экскаватора-драглайна | 1977 |
|
SU736323A1 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Способ взаимосвязанного управления электроприводами подъема и тяги драглайна | 1971 |
|
SU771833A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1985 |
|
SU1263761A2 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |
Фиг.2
