Изобретение относится к горнодобывающей промьшшенкости и может найти пшрокое применение при управлении объектами с большой инерционностью, например землеройными машинами.
Цель изобретения - повышение точности и быстродействия (т.е. качества управления) системы.
На чертеже представлена функциональная схема системы.
Схема содержит блок 1 сравнения, сумматор 2, коммутирующий элемент 3, суммирующий элемент Л, сумматор 5, усилитель 6, объект управления 7, первый и второй дифференциатор 8 и 9 задатчик 10, блок 11 изменения структуры, коммутатор 12.
Кроме того, на чертеже обозначено I , - выходной сигнал i -го блока или элемента системы.
В состав блока изменения йтрукту- ры 11 входят дифференциаторы 8 и 9 и сумматор 2.
. В состав коммутатора 12 BXOJBHT коммутирующий 3 и суммирующий |4 элементы.
Система работает следующим образом.
На выходе задатчика 10 формируется сигнал и , -крторый поступает на первый вход блока 1 сравнения, на второй вход которого поступает сигна i с выхода объекта 7; На выходе блока 1 сравнения формируется сигнал U:, K,(U, -и), где К,- коэффициент передачи блока 1 сравнения, и посту- пает на первый вход блока 11 изменения структуры, на второй вход которого поступает сигнал Ц задатчика 10. В блоке 11
16
с выхода
формируется сигнал
«
ц
to
где
изменения структуры . сигнал и(, дифферегнцируется в первом дифференциаторе; В, на Выходе которог
kg - коэффи1виент передачи дифференциатора 8, который поступает на первый вход сУ 4матора 2. .Кроме того, в блоке 11 изменейи структуры и,,поступающий на его первый вхоД, дифференцируется во втором дйфферей- циаторе 9, на выходе которого формируется сигнал , где Kg- коэффициент передачи дифференциатора 9, которьй поступает на второй вход сумматора 2. На третий вход сумматор 2 поступает сигнал 0 , а .на его выходе формируется сигнал Ч KjUg+ + , , гдеК ,К , К| -- коэффициенты передачи по первому, втором
и третьему входам сумматора 2. Выходной сигнал U сумматора 2 является выходным сигналом блока 11 изменения структуры. .
Сигнал и с выхода блока 11 из,мене- ния структуры поступает на управляющий вход коммутатора 12 и в нем на управляющий вход коммутирующего элемента 3.Сигнал t , с выхода блока 1 сравнения поступает на информационный вход коммутатора 12 и в нем на информационный вход коммутирующего элемента 3.
На вькоде коммутирующего элемента 3 формируется сигнал вида
и.-и.
если
и.и
1
О
еслии, и„
Этот сигнал поступает на вход суммирующего элемента 4, на выходе которого формируется сигнал +и , который поступает на первый вход сумматора 5..
На второй, и третий входы сумматора 5 поступают сигналы U, и U,, с вьпсо- дов блока 1 сравнения и блока 11 изменения структуры. На выходе сумматора 5 формируется сигнал
г .
с учетом вида коммутирующей функции коммутирующего элемента 3 можно выделить три режима работы системы.
5
0
0
и.Ч,
1-й режим вьтолняется при условии В этом случае выходной сигнал Uj коммутирующего элемента 3 будет равен Uj и -U,, а выходной сигнал Сумматора 5 будет равен
-и,-и,,.
-и.
2-й режим вьшолняется при условии U,U,,. В этом случае выходной сигнал Uj коммутирующего элемента 3 будет равен О, а выходной сигнал
сумматора 5 будет равен U
-и,.
5 «:и.
. 1
3-й режим выполняется при условии U, О или при разнополярных сигналах и.,, и и, . В этом случйе выходной сигнал Ug сумматора 5 будет равен Ug 0.
Выходной сигнал U сумматора 5 поступает йа вход усилителя 6, на выходе которого формируется сигнал U вида U Xg-Ug , где - коэффициент передачи усилителя б, который воздей- 5 ствует на объект 7 .управления.
Объект 7 управления меняет свое положение. Вькоднойсигнал (координата) и объекта 7 управления подается на
второй вход блока 1 сравнения. В дальнейгаем система работает аналогично до тех пор, пока выходной сигнал (J блока 1 сравнения не станет равным нулю.5
Работа системы на трех указанных режимах.
1-й режим. В этом случае управление в данной системе осуществляется так же как в обычной замкнутой системе pe-jQ гулирования по отклонению, когда управляющий сигнал на выходе усилителя
6 равен Ug-K Ui К(-и) хК, ((J.-U,), где .
При (/«5 К,/ 1 данная система близка к предельной, т.е. к тому случаю, когда выходной сигнал U объекта 7 управления перестает зави сеть от возмущающего воздействия и начинает точно воспроизводить выходной сигнал задатчика 10.
2-й режим. В этом случае .управление в данной системе осуществляется в. соответствии с сигналом (-,,)/(/ «(K tlg-b U, ,
К,0,,
,к,
Vfp - граничный коэффициент устойчи30
где , К вости.
Коэффициейт к , как в системах с комбинированным управлением, выбирается из условия демпфирования системы. Во время переходного процесса управления система работает В этом ус-35 тойчивом режиме, так как U, в этом случае, как правило, больше U .
При этом в случае перерегулирования при нарастающем задающем сигнале U,Q , когда сигнал рассогласования U, изменит знак,- а знак сигнала U, сохранится, система переходит в 3-й режим работы и сигнал управления U на объект 7 управления не лоступает. Объект 7 управления будет совершать свободное движение до момента, когда
40
45
5
Q
5
0
5
0
5
0
5
значение задающего сигнала и прег . -1 ft .
взойдет значение выходного сигнала. и на столь малую величину, что станет равным U,, и система перейдет в состояние, соответствующее 1-му режиму работы, т.е. в режим слежения с малой ошибкой.
В случае перерегулирования при Ug О, т.е. когда задающий сигнал и принял постоянное значение, система будет находиться в устойчивом состоянии, соответствующем 3-му режи- му работы, и выйдет из него при дальнейшем изменении задающего сигнала и . г
Изобретение позволяет повысить точность и быстродействие системы.
Формула изобретения.
1. Система с переменной структу рой, содержащая последовательно соединенные задатчик, блок сравнения, коммутатор, сумматор, усилитель и объект управления, соедийенный выходом с вторым входом блока сравнения, подключённого выходом к первому входу блока изменения структуры, соединенного вторым входом с выходом задатчика , а выходом с управляющим входом коммутатора, отличаю- щ а я с я тем, что, с целью повьше- ния точности и быстродействия системы, в ней выходы блока сравнения и блока изменения структуры соединены соответственно, с вторым и третьим, входами сумматора.
2. Система по п.1, отличающаяся тем, что блок изменения структуры содержит первый и второй дифференциаторы, соединенные выходами с первым и BTopi ёходами сумматора, причем третий вход сумматора, вход первого дифференциатора и зькор, сумматора являются соответственно первым, вторым входами и выходом блока изменения структуры.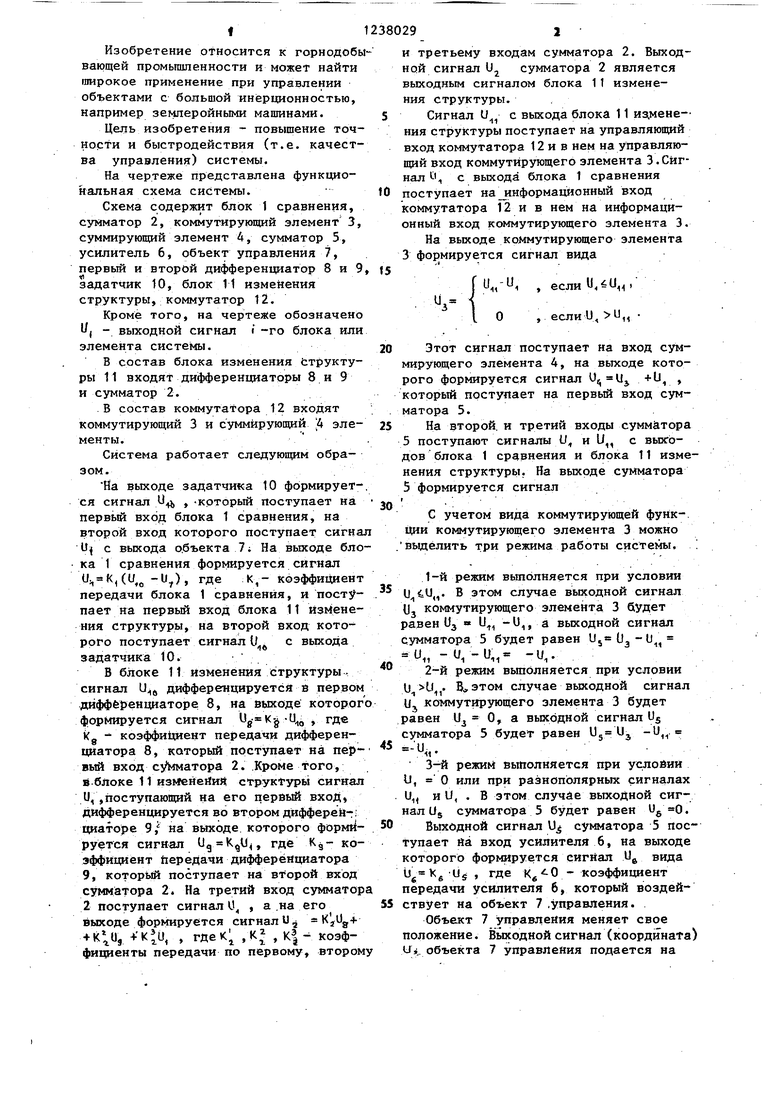

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1983 |
|
SU1105858A1 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1978 |
|
SU930251A2 |
| Следящая система | 1980 |
|
SU1003016A2 |
| Двухканальная система управления телескопом | 1983 |
|
SU1171752A1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| Система автоматического управления для объектов с запаздыванием | 1987 |
|
SU1534428A1 |
| Следящая система | 1986 |
|
SU1376061A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Система с переменной структурой | 1980 |
|
SU890361A1 |
| Устройство для управления инвертором с многоуровневым выходным напряжением | 1985 |
|
SU1304153A1 |

Редактор М.Дыпын
Составитель Ю.Гладков
Техред О .Гортвай Корректор О .-Луговая
3289/47
Тираж 836 Йодписное ВНЙИПИ Госуда)рственного комитета СССР
по делам изобретений и ptкpытИй 113035, Москва, Ж-35, Раушская наб., д. Д/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Современные методы проектирования систем автоматического управления./ Под общ | |||
| ред | |||
| Б.И.Петрова | |||
| - М.: Машиностроение, 1967, с.69-74 | |||
| ЦЫпкин Я.З | |||
| Основы теории автоматических систем.- М.: Наука, 1977, с | |||
| Деревянное стыковое скрепление | 1920 |
|
SU162A1 |
| Емельянов С.В | |||
| Системы автоматического управления с переменной структурой | |||
| - М.: Наука, 1967, с.37- 1,(54) СИСТЕМАС ПЕРЕМЕННОЙ СТРУКТУРОЙ ;(57) система относится к области горнодобывающей промышленности и может найти широкое применение при управлении объектами с большой йнер- цирнностью, например землеройными ;Мащинами | |||
| В системе решается задача компенсаций влияния параметрических возмущений объекта регулирования | |||
| Эта задача решается следующим образом | |||
| Сигнал задания поступает на вход блока сравнения, в котором сравнивается с текущим значением регулируемой координаты | |||
| Сигнал рассогласования через сумматор поступает на вход усилителя мощности, который воздействует на объект управления | |||
| Кроме того, сигнал задания и сигнал рассогласования поступают на входы блока изменения структуры, в котором они дифференцируются и суммируются с сигналом рассогласования | |||
| Суммарный сигнал поступает на второй вход сумматора и на управляющий вход коммутирующего элемента | |||
| На информационный вход коммутирующего элемента : и на первый вход суммирующего злемен- та подается сигнал рассогласования | |||
| Выходной сигнал коммутирующего эле- | |||
| мента подается на второй вход суммирующего элемента | |||
| Коммутирующий и суммирующие элементы входят в состав коммутатора | |||
| Выходной сигнал суммирующего элемента является вЬтодным налом коммутатора | |||
| Он поступает на третий вход сумматора | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| W to со 00 о ISD ю | |||
