(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ
. I .
Изобретение относится к робототех.нике и может быть использовано при соэ данви устройств для управления роботам -сжрасчиками.
Известно устройство опя управления прошлшлетгыкш роботами, содержащее блок задания программы, вь чиспитель{а 1й блок, приводы и аатчикв скорости коордвют исполнительного робота 1
Однако устройство имеет сложный работы. .
Наиболее близким по технической сущности к изобретению является устройство, содержащее последовательно соедя- ненные первый сумматор и привод, связанный с первым исполнительным механиз мом, последовательно соединенные втЬрые сумматор и привод, связанный через второй исполнительный механизм с пер-вым датчиком перемещения, выходкоторого подключен к первому входу сумматора, последовательно соединенные третьи сумматор и привод, связансаый с 1 етьим исполнительным механизмсм
и вторым датчиком перемещения, посл&« довательнр соеди11ен{ ые четвертые суммд тор И пршод, связанный с исполнительным механизмом и третьим датчике п ш{ешет1Я, а также .. 6л(яс задания программы, , второй в третий выхода которого подключены со ответственно к второму входу
1 сумматора v первым входам третьего я
четвертхя о сумматоровС.
10
; Недостатками устройства являются задание траттории движения ашлвтвчес КИМ путем, а также наличие сложных вычислительных блоков.
ts
иель изобретения - улучщение эксш луаташонвых характеристик устройства.
Цель достигается тем, что устройство содержит дополввтельво первый и второй датчики рассгояввя до объекта, датчик
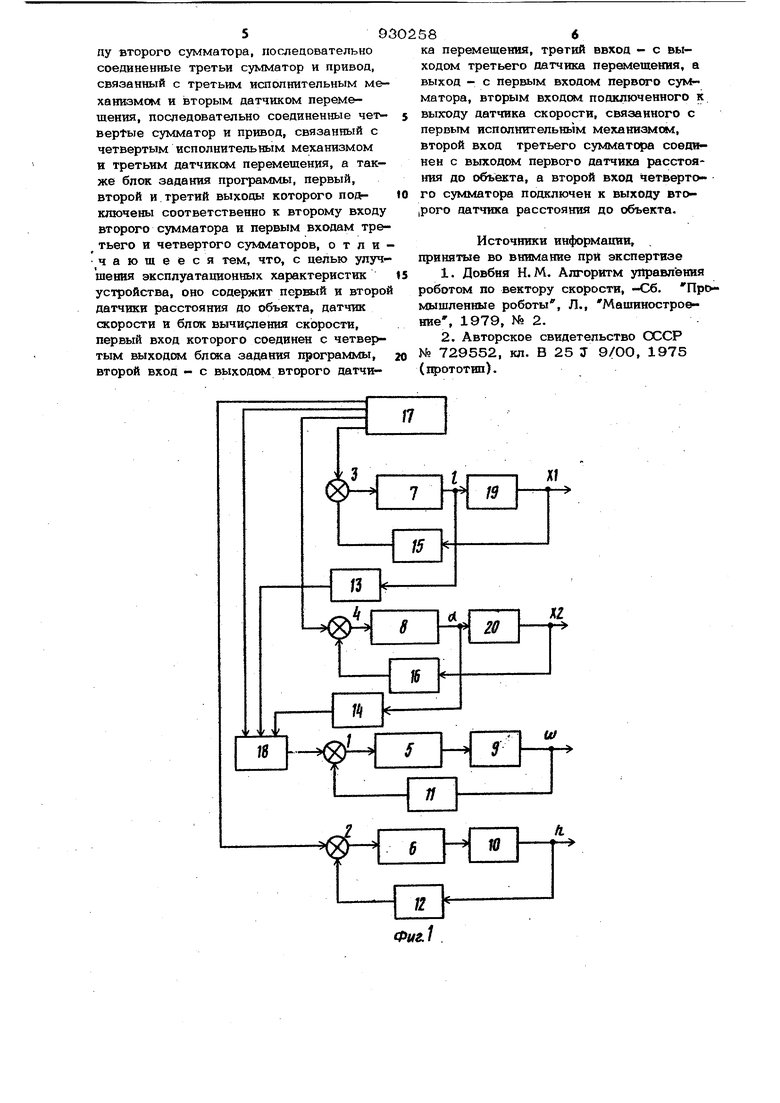
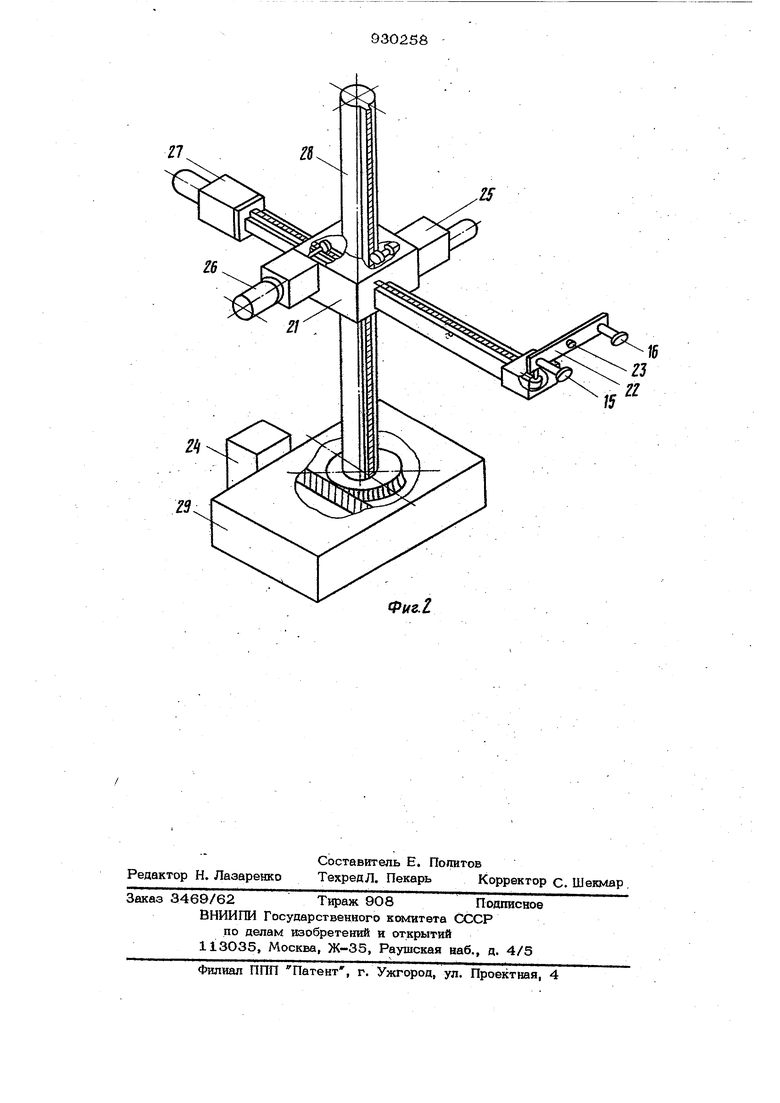
20 скорости в блок вычисленвя acqpocTB, первый вход соединен с четве1 тым выходом блока задавия программы, второй вход - с выходом второго дат чика перемещения, третий вход - с выходом третьего датчика перемещения, а вы ход - с первым входом первого суммато ра, вторым входом подключенного к выходу датчика скорости, связанного с первым исполнительным механизмом, второй вход третьего сумматора соединен с выходом первого датчика расстояния до объекта, а второй вход четвертого сумматора подключен к выходу второго датчика расстояния до объекта. На. фиг. 1 лредставлена функционап)Ьгная схема устройства; на фиг, 2 - кинематическая схема исполнительного органа робота. Устройство содержит первый, второй, третий и четвертый сумматоры 1-4 соответственно, первый, второй., третий и четвертый приводы 5-8 соогветствен но; первый и второй, третий и четвертый исполнительные механизмы 9 и 10 соответственно, датчик 11 скорости, первы второй и третий датчики 12, 13 и 14 перемещения соответственно, первый и второй датчики 15 и 16 расстояния до объекта соответственно, блок 17 задани программы, блок 18 вычисления скорост третий и четвертый исполнительные меха низмы 19 и 2О соответственно. Исполнительный орган робота содержит каретки 21, шарнирную штангу 22, распылитель 23, координаты 24-27 поворота, подъема, выдвижения и поворота штанги исполнительного органа :Соответственно1 стойку 28 и основание .29. Устройство работает следующим образом. При окраске внутренней поверхности помещения робот устанавливается на I полу помещения. Раздвижная стойка 28 закрепляется в потолок помещения. . Блок 17 задания программы задает круг вые движения приводу 5 координаты 24 поворота с переходом на щаг обработки по вертикали приводом 6 координаты 25 подъе 1а, равный ищрине факела распылителя 23, после каждого кругового движения руки при номинальном расстоянии до обрабатываемой поверхности. При отрыве датчиков 15 и 16 от поверхнооти (увеличении расстояний, выше допустимых при окраске) по сигналу от датчика 16 работает привод 8 координаты 27 поворота штанги, обеспечивая постоя ство зазора до поверхности объекта, а по сигналу датчика 15 работает привод 7 координаты 26 выдвижения, обеспечивая постоянство зазора до поверхности объекта. Таким образец, распылитель 23 всегда удерживается на заданном фиксированном расстоянии от обрабатываемой поверхности объекта и направлен всегда по нормали к огибающей обрабатываемой поверхности. Стабилвзапия модуля вектора скорости обеспечивается приводсм 5. Скорость обработки V {результирующий вектор скорости штанги 22, участвующей одновременно в двух движениях поступательном и вращательном) есть геометрическая сумма скорости выдвижения руки VQ и линейной скорости вращения руки вокруг вертикальной оси VYY . Из треугольника скоростей следует , где ы - угловая скорость поворота вокруг вертикальной оси, 2 - длина выдвинутой части, oL .- угол разворота штанги 22. Отсюда .) Тогда, если угловую скорость поворота вокруг вертикальной оси поддерживать, согласно выражению (1), распылитель 23 будет перемещаться относительно обрабатываемой поверхности объекта не только на неизменном расстоянии от нее и при строгой ориентации по нормали к ней, но и с постоянной по модулю скоростью. С этой целью привод 5 работает в следук шем режиме по задания, формируемому на выходе блока 18 вычисления скорости, на вход которого заведены сигналы с датчиков 13 и 14 и с блока 17 задания программы для задания Х/р. Применение изобретения позволит создать необходимые условия для обеспечения высокого качества покрытий и существенно упрощает устройство для управления промышленным роботом. Формула изобретения Устройство для управления промышленным роботом, содержащее последователе но соединенные первые сумматор и привод, связанный с первым исполнительным механизмом, последовательно соединенные вторые сумматор и привод, связанный через второй исполнительный механизм с первым датчиком перемещения, выход которого подключен к первому вхопу второго сумматора, последовательно соединенные третьи сумматор и привод, связанный с третьим исполнительным механизмом и вторым датчиком перемещения, последовательно соединенные четверТые сумматор и привод, связанный с четвертым исполнительным механизмом и третьим датчики перемещения, а также блок задания программы, первый, второй и третий выходы которого подкдючены соответственно к второму входу второго сумматора и первым входам третьего и четвертого сумматоров, отличающееся тем, что, с целью улучшения эксплуатационных характеристик устройства, оно содержит первый и второй датчики расстояния до объекта, датчик скорости и блок вычисления скорости, первый вход которого соединен с четвертым выходом бпока задания программы, второй вход - с выходом второго датчика перемещения, третий ввход - с выходом третьего датчика перемещения, а выход - с первым входом первого сумматора, вторым входом подключенного к выходу датчика скорости, связанного с первым исполнительнь1М механизмом, второй вход третьего сумматора соединен с выходом первого датчика расстояния до объекта, а второй вход четвертого сумматора подключен к выходу втоiporo датчика расстояния до объекта.
Источники информации, принятые во внимание при экспертизе
1.Довбня Н. М. Алгоритм управления роботом по вектору скорости, -Сб. Пр мышленные роботы. Л., Машиностроение, 1979, № 2.
2.Авторское свидетельство СССР № 729552, кл. В 25 Т 9/00, 1975 (гфототип).
X
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1414624A1 |
| Устройство управления манипулятором робота | 2018 |
|
RU2701459C1 |
| Устройство для автоматического управления роботом-манипулятором | 1986 |
|
SU1403016A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1986 |
|
SU1348774A1 |
| Устройство для управления сборочным роботом | 1985 |
|
SU1247839A1 |
| Устройство для программного управления с коррекцией программы | 1986 |
|
SU1352457A1 |
Фиг.1
