112
Изобретение относится к робототех™ пике и может быть использовано при создании сборочньк роботов, работающих по заданной программе.
Цель изобретения расширеиие функциональных возможностей устройства путем обеспечения программного з п- равления сборкой.
На чертеже пр едставлена фушсцйо нальная схема устройства.
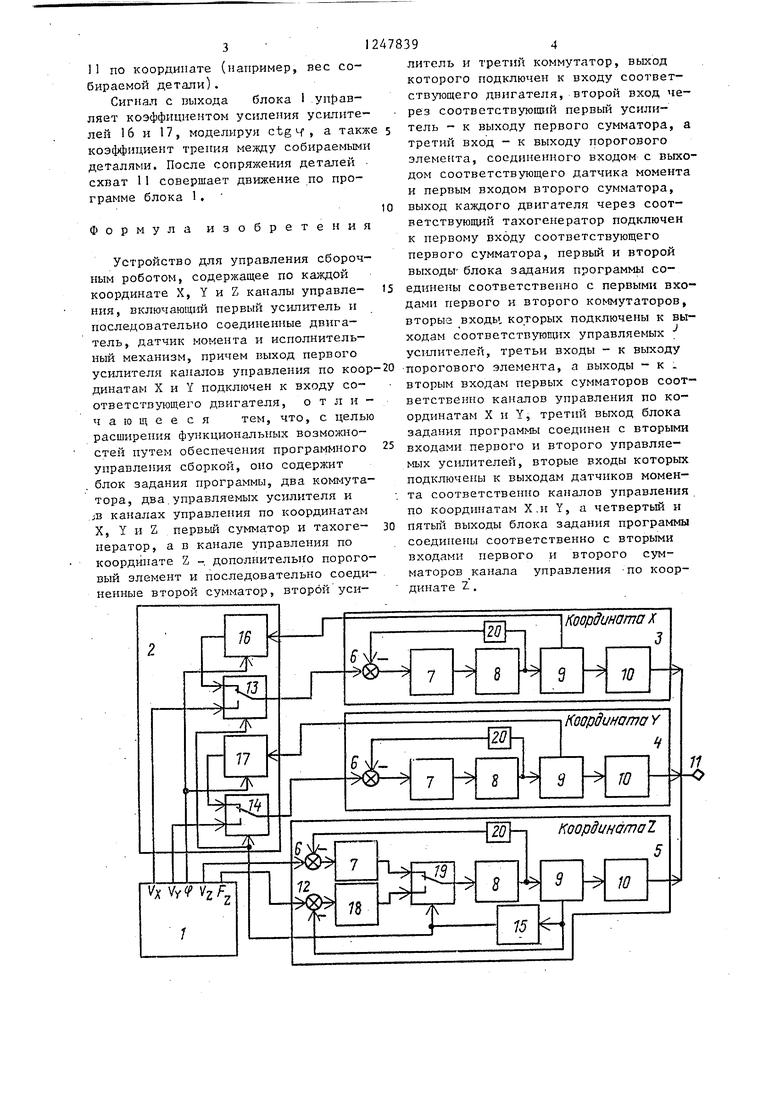
Устройство содержит блок 1 задания программы, блок 2 модели сборочного процесса, каналы 3-5 управления по . координатам X, Y соответственно, первые сумматоры 6, первые усилители
7, д.вигатели 8, датчики 9 момента, иclЮJГлитeлгл ыe механизмы Ю, схват ll, второй сумматор 12, первыа и второй коммутаторы 3 и 14 соответст- нснио5 пороговый элемент 15, нер.оый и BTO-pofi управл51егйле ус1ип1толн 16 и 17 соответственно, второй усилитель 18, третий коммутатор 19, тахогене- , раторы 20. V , Vy, v , V и F. - программные сигналы блока 1,
Устройство работает следующим образом.,
Для вывода детали на позицию сборки схватом робота (другая деталь является базовой и укреплена неподвижно) сигналы с выходов блока 1 задания нрО1 раммы Vy , V сообщарэт координатам X и Y скорости перемещения.
Каждый сигнал с выхода V
или V,
1:3
V
или
проходит через коммутатор на сумматор -б соответствующей коор- , динаты и далее через усилитель 7 на двигатель 8 и затем движение через датчик 9 момента передается на ис- иoJПUIтeльныii механизм 10, Конструктивно датчик 9 момента представляет собой торсион, охваченньй кинематическими связями с чувствительным злементом. Чувствительный элемент . вырабатывает сигнал, нропордиональ™ кый углу закручивания торсиона, что соответствует развиваемому моменту сопротивления при преобразованной через исполнительный механизм Ю силе воздействия охвата по соответствующе коорд1П1ате. Этот сигнал подается с . выхода датчика 9 момента. После зы- аода схиата П в .режим сборки сиг-налы с выходов V и V пулевые, сигнал Vj управляет скоростью движения но координате до соприкосновения деч алей аналогично перемещению двигателей 8 по координатам X и Y. В мо14
0
15
20
25
30
35
45
40
50
мент соприкосновения деталей-сигнал с датчика 9 момента координаты Z превысит порог срабатывания порогово- I o ;-элемента 15 и переключает коммутатор 19, Теперь вход двигателя 8 соег диняется с выходом второго ycj-шителя 8. Сигнал с выхода F управляет с данного момента силой воздействия координаты Z. В этом случае контур управления определится элементами 18, 19, 8 и 9 и обратной связью по моменту сопротивления. Деталь-отверстие имеет угол с- угол фаски детали, F., - вертикальная сила воздействия, F, реактивная сила по одной из горизонтальных координат (например, Х), причем F F., ctg у Это соотношение заложено в самом взаимодействии де- тгшей, и чем больше отклонение осей деталей по одной из горизонтальных коордшшт, тем больше сила реакции по этой координате. Эта взаимосвязь заложена в блок 2 модели сборочного процесса; величина реактивной силы прямо пропорциональна скорости движения соответствуюп1ей координаты X и Y. Наличие блока 2 позволяет плавно, без лишних переключе2 ий и реверсов движения коорд.инат X и Y совместить оси собираемых деталей, т.е. позволяет сократить время сборочного процесса. Таким образом, с момента действия силы В реактивные силы F и F через исполнительные механизмы 10 и датчики 9 моментов координат X и Y в виде сигналов через управляемые усилители соответственно 16 и 17 подключаются к коммутаторам 13 и Г4, К этому моменту сигнал с порогового элемента 15 пе теключает коммутаторы 13 п 1Д на связь сигналов реактивных сил с управляющими входами сумматоров б соответственно координат X и Y. В момент совмещения вертикальных осей собираемых деталей сигнал с датчика 9 момента координаты Z не проходит через пороговый элемент 15, что ведет, в,свою очередь, через коммутаторы 13, 14 и 19 к связи сигналов с выходов блока 1 соответственно V.5 V , Vy с входами сумматоров б соответственно координат Х, Y, Z. Но так как в это время по программе только выход F не обнулен, деталь опускается по координате Z до гарап- тпрованной сборки деталей. В момент сборки схват 11 разйагмается. F - втгешнее силовое воздействие па схват
11 по координате (например, вес собираемой детали).
Сигнал с иыхода блока 1 уп{)ав ляет коэффициентом усиления усилителей 16 и 17, моделируя ctg Ц , а такж коэффициент трепия между собираемыми деталями. После сопряжения деталей схват 11 совершает движение по программе блока 1.
Формула изобретения
Устройство для управления сборочным роботом, содержащее по каждой координате X, Y и Z каналы управления, включающем первый усилитель и последовательно соединенные двигатель, датчик момента и исполнительный механизм, причем выход первого
усилителя каналов управления по коор-20 -порогового элемента, а выходы - динатам X и Y подключен к входу соответствующего двигателя, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения программного управления сборкой, оно содержит блок задания программы, два коммутатора, два.управляемых усилителя и jB каналах управления по координатам X, Y и Z первый сумматор и тахоге25
30
вторым входам первых сумматоров ветственно каналов управления по ординатам X п Y, третий выход бл задания программы соединен с вто входами первого и второго управл мых усилителей, вторые входы кот подключены к выходам датчиков мо та соответственно каналов управл по координатам Х,п Y, а четверты пятьш выходы блока задания прогр соединены соответственно с вторы входами первого и второго су маторов канала управления -по к динате 2.,
нератор, а в канале управления по координате Z - дополнительно пороговый элемент и последовательно соединенные второй сумматор, второй уси-
литель и третий коммутатор, выход которого подключен к входу соответствующего двигателя, второй вход через соответствующш первый усилитель - к выходу первого сумматора, а третий вход - к выходу порогового элемента, соединенного входом с выходом соответствующего датчика момента и первым входом второго сумматора, выход каждого двигателя через соответствующий тахогенератор подключен к первому входу соответствующего первого сумматора, первый и второй выходы- блока задания программы со- единены соответственно с первыми входами первого и второго коммутаторов, вторые входы, которых подключены к выходам соответствующих управляемых - усилителей, третьи входы - к выходу
-порогового элемента, а выходы -
вторым входам первых сумматоров соответственно каналов управления по координатам X п Y, третий выход блока задания программы соединен с вторыми входами первого и второго управляемых усилителей, вторые входы которых подключены к выходам датчиков момента соответственно каналов управления по координатам Х,п Y, а четвертый и пятьш выходы блока задания программы соединены соответственно с вторыми входами первого и второго сумматоров канала управления -по координате 2.,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1986 |
|
SU1414624A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления сборочным роботом | 1981 |
|
SU989534A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU875331A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| Устройство для программного управления с коррекцией программы | 1986 |
|
SU1352457A1 |
Изобретение относится к робототехнике и может быть использовано при создании сборочных роботов, работающих по заданной программе, В изобретении за счёт введения блока Задания программы, коммутаторов -управляемых усилителей, сумматоров, тахогенераторов и порогового элемента расширяются функциональные возможности устройства путем обеспечения программного управления сборкой. 1 ил.) (Л с 4i -si 00 00 со
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления сборочным роботом | 1981 |
|
SU989534A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
