(5) АВТООПЕРАТОР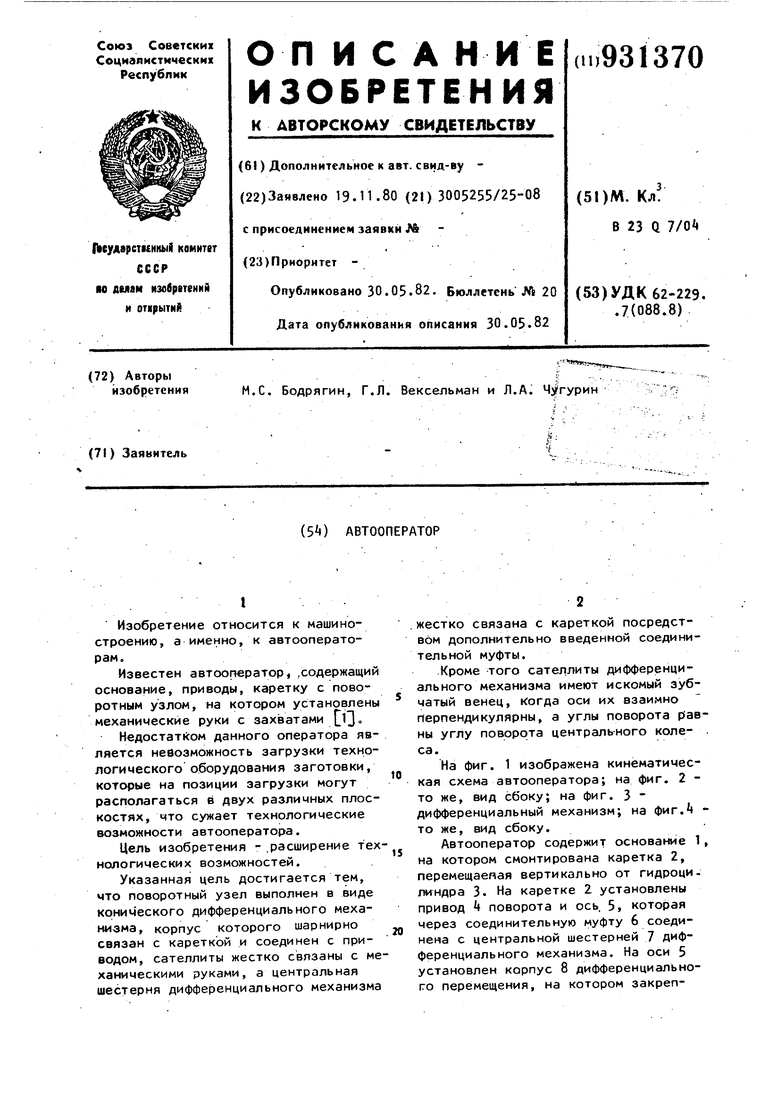
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU837757A1 |
| Устройство для загрузки станков | 1981 |
|
SU986725A2 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| ПЕРЕНОСНОЙ СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 1998 |
|
RU2144449C1 |
| Автооператор | 1986 |
|
SU1491655A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
I
Изобретение относится к машиностроению, а именно, к автооператорам.
Известен автооператор, ,содержащий основание, приводы, каретку с поворотным узлом, на котором установлены механические руки с захватами LQ.
Недостатком данного оператора является невозможность загрузки технологического оборудования заготовки, которые на позиции загрузки могут располагаться в двух различных плоскостях, что сужает технологические возмомности автооператора.
Цель изобретения -.расширение технологических возможностей.
Указанная цель достигается тем, что поворотный узел выполнен в виде конического дифференциального механизма, корпус которого шарнирно связан с кареткой и соединен с приводом, сателлиты жестко связаны с механическими руками, а центральная шестерня дифференциального механизма
,жестко связана с кареткой посредством дополнительно введенной соединительной муфты.
Кроме того сателлиты дифференциального механизма имеют искомый зубчатый венец, когда оси их взаимно перпендикулярны, а углы поворота равны углу поворота централь-ного колеса.
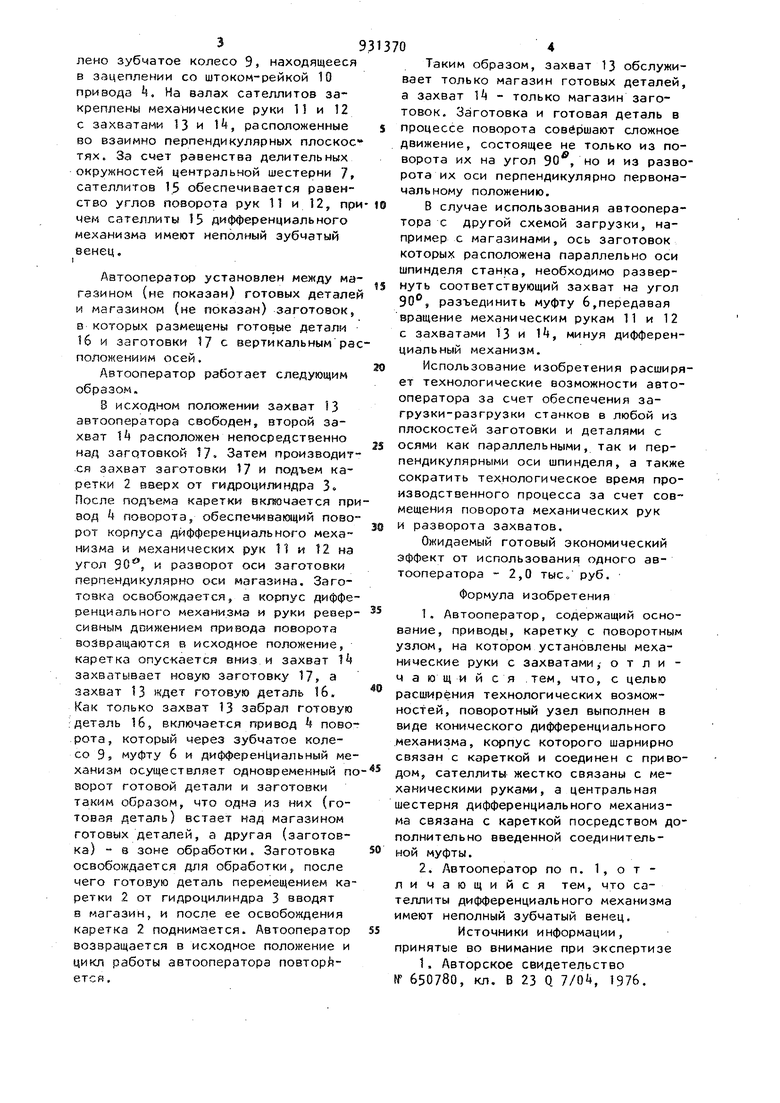
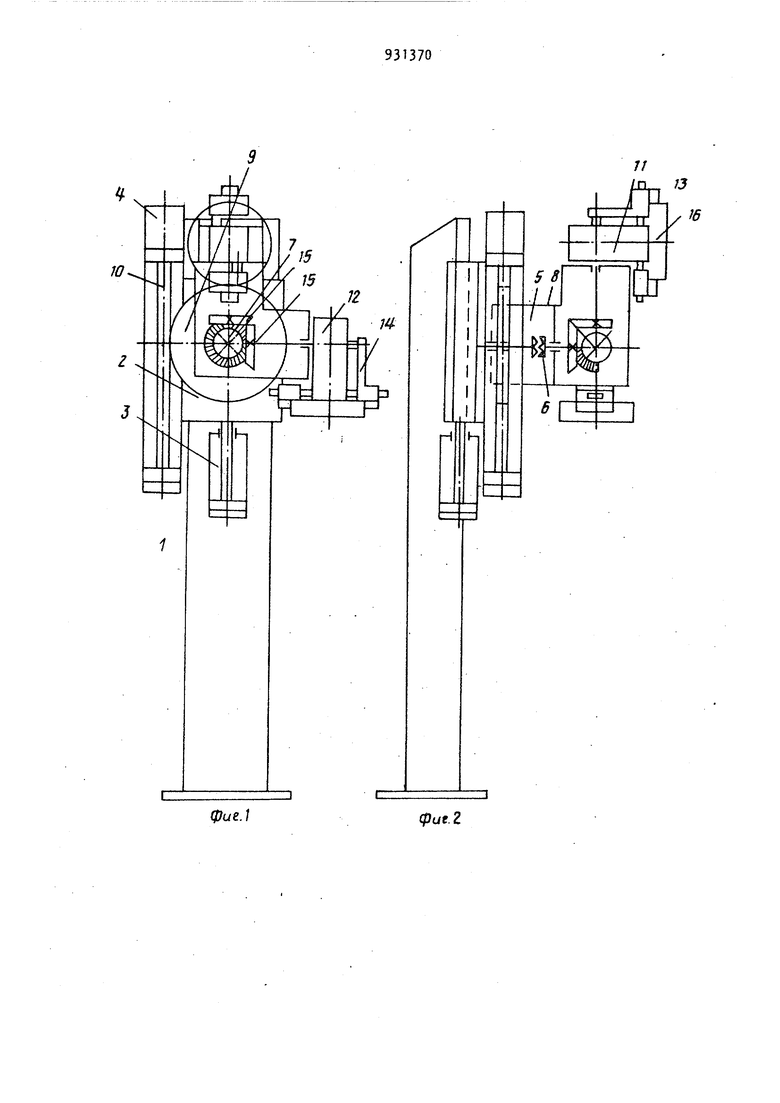
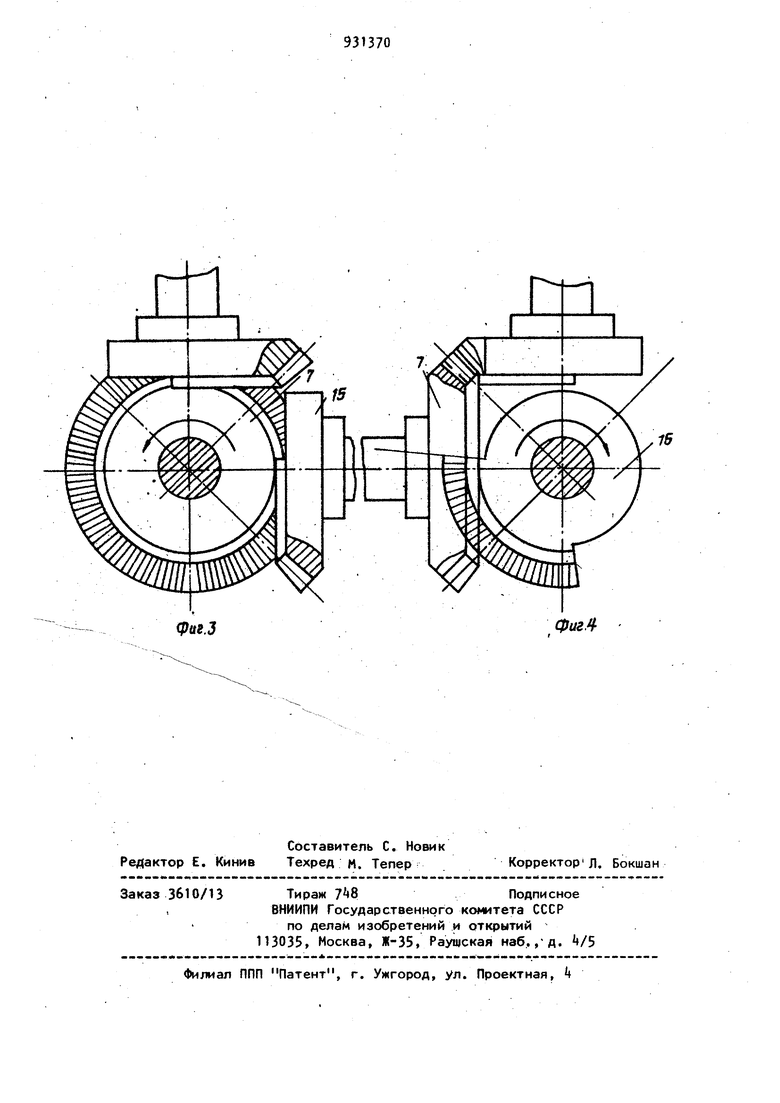
На фиг. 1 изображена кинематическая схема автооператора; на фиг. 2 то же, вид сбоку; на фиг. 3 дифференциальный механизм; на фиг. то же, вид сбоку.
Автооператор содержит основание 1, на котором смонтирована каретка 2, перемещаемая вертикально от гидроцилиндра 3. На каретке 2 установлены привод поворота и ось, 5, которая через соединительную муфту 6 соединена с центральной шестерней 7 дифференциального механизма. На оси 5 установлен корпус 8 дифференциального перемещения, на котором закреп3лено зубчатое колесо 9, находящееся в зацеплении со штоком-рейкой 10 привода k. На валах сателлитов закреплены механические руки 11 и 12 с захватами 13 и }k, расположенные во взаимно перпендикулярных плоское тях. За счет равенства делительных окружностей центральной шестерни 7, сателлитов 15 обеспечивается равенство углов поворота рук 11 и 12, при чем сателлиты 15 дифференциального механизма имеют неполный зубчатый венец. Аатооператор установлен между ма газином (не показан) готовых детале и магазином (не показан) заготовок, в которых размещены готовые детали 16 и заготовки 17 с вертикальнымра положениим осей. Автооператор работает следующим образом. 8 исходном положении захват 13 автооператора свободен, второй захват И расположен непосредственно над заготовкой 17. Затем производит ся захват заготовки 17 и подъем каретки 2 вверх от гидроцилиндра 3. После подъема каретки включается пр вод k поворота, обеспечиващий пово рот корпуса дифференциального механизма и механических рук 11 и 12 на угол ЭО, и разворот оси заготовки перпендикулярно оси магазина. Заготовка освобождается, а корпус диффе ренциального механизма и руки ревер сивным движением привода поворота возвращаются в исходное положение, каретка опускается вниз и захват t захватывает новую заготовку 17 а захват 13 «дет готовую деталь 16. Как только захват 13 забрал готовую :деталь 16, включается привод k пово рота, который через зубчатое колесо 9 j муфту 6 и дифференциальный ме ханизм осуществляет одновременный п ворот готовой детали и заготовки таким образом, что одна из них (готовая деталь) встает над магазином готовых деталей, а другая (заготовка) - в зоне обработки. Заготовка освобождается для обработки, после чего готовую деталь перемещением ка ретки 2 от гидроцилиндра 3 вводят в магазин, и после ее освобождения каретка 2 поднимается. Автооператор возвращается в исходное положение и цикл работы автооператора повторйетсй. 0 Таким образом, захват 13 обслуживает только магазин готовых деталей, а захват 1 - только магазин заготовок. Заготовка и готовая деталь в процессе поворота совершают сложное движение, состоящее не только из поворота их на угол 90 , но и из разворота их оси перпендикулярно первоначальному положению. В случае использования автооператора с другой схемой загрузки, например с магазинами, ось заготовок которых расположена параллельно оси шпинделя станка, необходимо развернуть соответствующий захват на угол 90, разъединить муфту 6,передавая вращение механическим рукам 11 и 12 с захватами 13 и I, минуя дифференциальный механизм. Использование изобретения расширяет технологические возможности автооператора за счет обеспечения загрузки-разгрузки станков в любой из плоскостей заготовки и деталями с осями как параллельными, так и перпендикулярными оси шпинделя, а также сократить технологическое время производственного процесса за счет совмещения поворота механических рук и разворота захватов. Ожидаемый готовый экономический эффект от использования одного автооператора 2,0 тыс. руб. Формула изобретения 1.Автооператор, содержащий основание, приводы, каретку с поворотным узлом, на котором установлены механические руки с захватами,- о т л и ч а о щ и и с я .тем, что, с целью расширения технологических возможностей, поворотный узел выполнен в виде конического дифференциального механис ма, корпус которого шарнирно связан с кареткой и соединен с приводом, сателлиты жестко связаны с механическими руками, а центральная шестерня дифференциального механизма связана с кареткой посредством дополнительно введенной соединительной муфты. 2.Автооператор по п. 1, о т личающийся тем, что сателлиты дифференциального механизма имеют неполный зубчатый венец. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство ff 650780, кл. В 23 Q 7/0, 1976.
фиг.
фие.г
