(54) ЗАПЯСТЬЕ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Запястье манипулятора | 1985 |
|
SU1303405A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Универсальный шарнир | 1975 |
|
SU551454A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Запястье манипулятора | 1972 |
|
SU512048A1 |
| КОПИРОВАЛЬНО-ФРЕЗЕРНЫЙ СТАНОК | 1972 |
|
SU432986A1 |
| Карданный шарнир | 1982 |
|
SU1145936A3 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| Запястье манипулятора | 1987 |
|
SU1407797A1 |
1
Изобретение относится к машиностроению , в частности к манипуляторам.
Известно запястье манипулятора, содержащее шарнирно связанные, например, карданным шарниром, механическую руку и схват 1.
При перемещениях схвата возможны случайные ударные контакты его с производственным оборудованием, что снижает надежность и ведет к повыщению динамических нагрузок при отработке перемеще- ю НИИ руки со схватом.
Цель изобретения - повышение надежности и снижение динамических нагрузок.
Поставленная цель достигается тем, что запястье снабжено жестко связанным с механической рукой кронштейном, имеющим два тела качения, и жестко связанным со схватом кольцом, расположенным с возможностью взаимодействия с телами качения, причем вилка карданного шарнира имеет возможность перемещения относительно 20 руки, а точка пересечения осей карданного шарнира и точки контактов тел качения с кольцом схвата образуют равнобедренный треугольник.
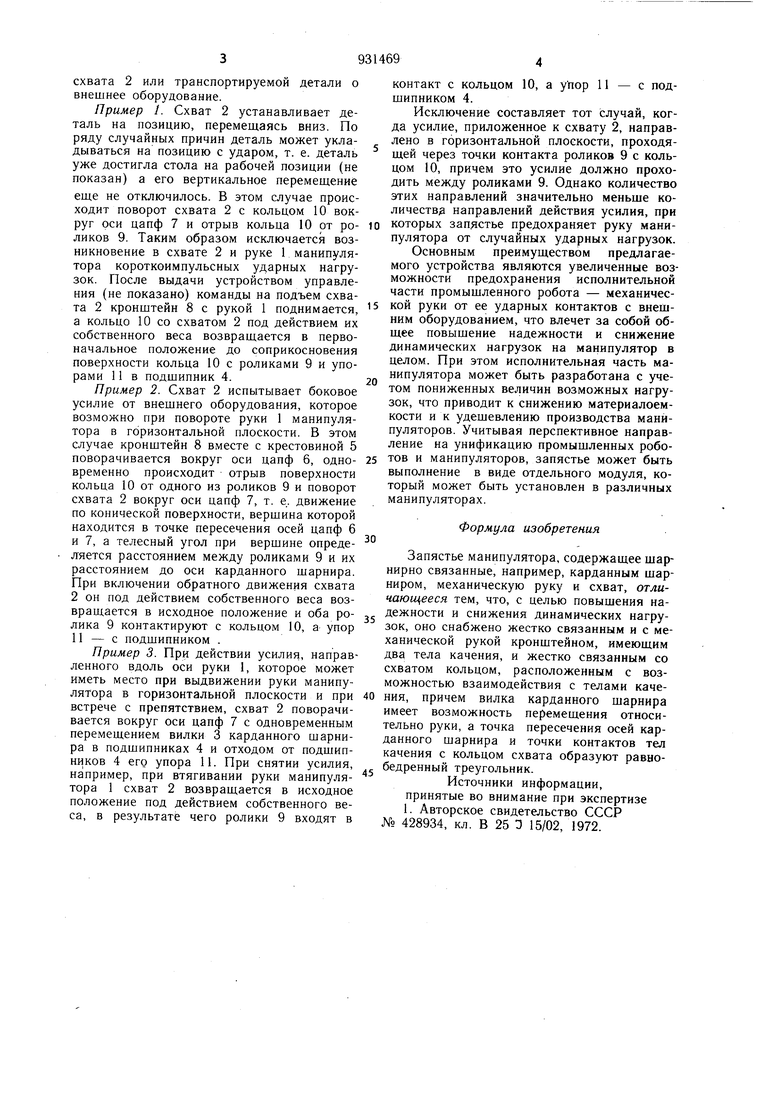
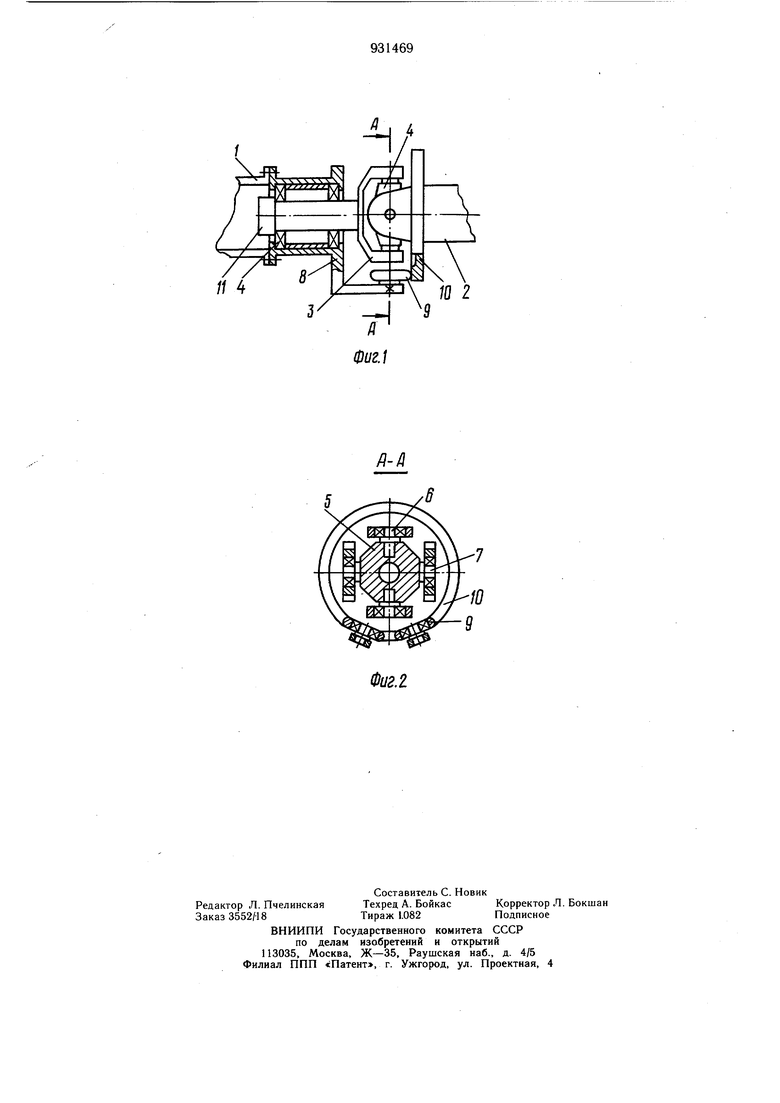
На фиг. 1 представлено запястье манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Предлагаемое запястье состоит из механической руки 1 манипулятора, связанной со схватом 2 посредством карданного шарнира, вилка 3 которого образует кинематическую пару с рукой 1, относительно которой она имеет возможность осевого перемещения и вращения в опорах-подшипниках 4.
Крестовина 5 карданного шарнира связана своими цапфами 6 и 7 с вилкой 3 и схватом 2 соответственно.
С механической рукой 1 жестко связан кронщтейн 8, имеющий тела качения - ролики 9.
На схвате 2 жестко установлена кольцо 10, имеющее возможность взаимодействия с роликами 9. На конце вилки 3 имеется упор 11.
Запястье работает следующим образом.
При работе манипулятора схват 2 перемещается в пространстве, совершая рабочие действия с объектом манипулирования. При этом возможны случайные соударения
схвата 2 или транспортируемой детали о внешнее оборудование.
Пример }. Схват 2 устанавливает деталь на позицию, перемещаясь вниз. По ряду случайных причин деталь может укладываться на позицию с ударом, т. е. деталь уже достигла стола на рабочей позиции (не показан) а его вертикальное перемещение
еще не отключилось. В этом случае происходит поворот схвата 2 с кольцом 10 вокруг оси цапф 7 и отрыв кольца 10 от роликов 9. Таким образом исключается возникновение в схвате 2 и руке 1 манипулятора короткоимпульсных ударных нагрузок. После выдачи устройством управления (не показано) команды на подъем схвата 2 кронщтейн 8 с рукой 1 поднимается, а кольцо 10 со схватом 2 под действием их собственного веса возвращается в первоначальное положение до соприкосновения поверхности кольца 10 с роликами 9 и упорами 11 в подшипник 4.
Пример 2. Схват 2 испытывает боковое усилие от внещнего оборудования, которое возможно при повороте руки 1 манипулятора в горизонтальной плоскости. В этом случае кронштейн 8 вместе с крестовиной 5 поворачивается вокруг оси цапф 6, одновременно происходит отрыв поверхности кольца 10 от одного из роликов 9 и поворот схвата 2 вокруг оси цапф 7, т. е.. движение по конической поверхности, вершина которой находится в точке пересечения осей цапф 6 и 7, а телесный угол при верщине определяется расстоянием между роликами 9 и их расстоянием до оси карданного шарнира. При включении обратного движения схвата 2 он под действием собственного веса возвращается в исходное положение и оба ролика 9 контактируют с кольцом 10, а упор 11 - с подщипником .
Пример 3. При действии усилия, направленного вдоль оси руки 1, которое может иметь место при выдвижении руки манипулятора в горизонтальной плоскости и при встрече с препятствием, схват 2 поворачивается вокруг оси цапф 7 с одновременным перемещением вилки 3 карданного шарнира в подшипниках 4 и отходом от подшипников 4 его упора 11. При снятии усилия, например, при втягивании руки манипулятора 1 схват 2 возвращается в исходное положение под действием собственного веса, в результате чего ролики 9 входят в
контакт с кольцом 10, а упор 11 - с подщипником 4.
Исключение составляет тот случай, когда усилие, приложенное к схвату 2, направлено в горизонтальной плоскости, проходящей через точки контакта роликов 9 с кольцом 10, причем это усилие должно проходить между роликами 9. Однако количество этих направлений значительно меньше количеству направлений действия усилия, при
которых запястье предохраняет руку манипулятора от случайных ударных нагрузок. Основным преимуществом предлагаемого устройства являются увеличенные возможности предохранения исполнительной части промыщленного робота - механической руки от ее ударных контактов с внешним оборудованием, что влечет за собой общее повышение надежности и снижение динамических нагрузок на манипулятор в целом. При этом исполнительная часть манипулятора может быть разработана с учетом пониженных величин возможных нагрузок, что приводит к снижению материалоемкости и к удещевлению производства манипуляторов. Учитывая перспективное направление на унификацию промыщленных роботов и манипуляторов, запястье может быть выполнение в виде отдельного модуля, который может быть установлен в различных манипуляторах.
Формула изобретения
Запястье манипулятора, содержащее щарнирно связанные, например, карданным щарниром, механическую руку и схват, отличающееся тем, что, с целью повыщения надежности и снижения динамических нагрузок, оно снабжено жестко связанным и с механической рукой кронщтейном, имеющим два тела качения, и жестко связанным со схватом кольцом, расположенным с возможностью взаимодействия с телами качения, причем вилка карданного щарнира имеет возможность перемещения относительно руки, а точка пересечения осей карданного щарнира и точки контактов тел качения с кольцом схвата образуют равнобедренный треугольник.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 428934, кл. В 25 :Э 15/02, 1972.
