О
СО
sl
,х
ipeif
Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам, и может быть использовано в различных отрас- лях машиностроения при автоматизации технологических процессов, в частности сборочных работ.
Целью изобретения является расширение технологических возможностей путем обеспечения угловых и осевых перемещений схвату.
На фиг, 1 представлено запястье манипулятора, разрез; на фиг. 2 - разрез А-А на фиг. 1..
Запястье установлено в корпусе 1 руки манипулятора и представляет собой промежуточный узел между этим корпусом и охватом 2, например,- ку- лисно-рычажного типа, связанным со штоком 3 пневмо- или гидроцилиндра 4 Цилиндр 4 связан с корпусом 1 через шатун 5, на концах которого вьтолне- ны шаровые или карданные шарниры 6. Между цилиндром 4 и корпусом 1 уста- новлена спиральная пружина 7, вьшол- нённая из плоской ленты, ориентированная соосно корпусу 1, прикрепленная одним концом к корпусу 1, а другим - к цилищфу 4 схвата 2.
Запястье манипулятора работает следующим образом.
При подходе схвата к месту позиционирования, с деталью или без нее с определенной погрешностью, допускае - мой величинами линейного и углового смещений манипулятора, происходит соприкосновение схбата или детали в. нем с объектом позиционирования. При смещении схвата 2 в направлении, перпендикулярном направлению установ кя детали, происходит попадание детали в установочное отверстие. При последующем осевом смещении схвата 2 происходит выравнивание детали относительно объекта установки в процессе поперечнвпс .вынужденных угловых и линейных смещений схвата 2 со своим цилиндром 4 относительно корпуса 1 в любую сторону за счет угловых и линейных смещений спиральной пружиной 7 в пределах ее упругой деформа
0 Q
.
0
5
ции с соответствующим поворотом ша- туна 5 в шарнирах 6. Кроме того, пружина 7 обеспечивает возможный осевой поворот схвата 2 относительно корпуса процессе своего скручивания или раскручивания, например, при первоначально неточном совмещении некруглых деталей. Цри последующем освобождении схвата 2 от детали пружина 7 возвращает схват 2 в свое исходное уравновешенное состояние.
Преимуществом предлагаемого технического решения перед известным является расширение технологических возможностей сборочного манипулятора, так как спиральная пружина обеспечивает любые угловые, линейные и поворотные смещения при неточности позиционирования в процессе установки, а вьшопненный упор схвата в корпусе руки манипулятора в осевом направлении через шатун с шарнирами на его концах обеспечивает такую же свободу плавания схвата при осевой силовой нагрузке на схват в период совмещения деталей.
Кроме того, запястье манипулятора отличается повышенной компактностью, так как спиральная пружина размещена внутри з,вена -предлагаемого манипулятора, а не выступает за его пределы, как сильфон известного.
Формула изобретения
Запястье манипулятора, содержащее схват, связанный со штоком силового цилиндра, снабженного шарниром, установленным в корпусе руки манипулятора, и упругий элемент, связанный концами с корпусом руки манипулятора и схватом, отличающееся тем, что, с целью расширения технологических возможностей путем обеспече;- ния угловых и осевых перемещений схвату, оно снабжено шатуном, шарнир- но связанным одним концом с корпусом руки манипулятора, другим - с шарниром цилиндра, а упругий элемент выполнен в виде спиральной пружины, установленной в корпусе руки манипулятора соосно силовому цилиндру.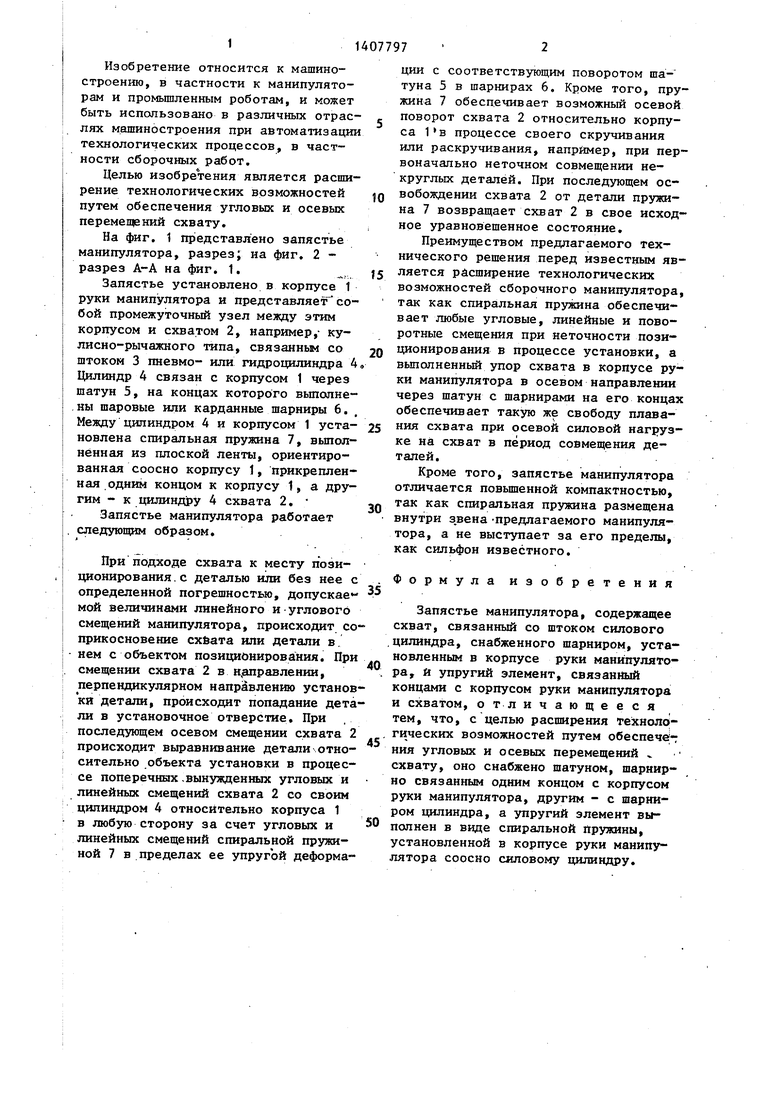
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Запястье манипулятора | 1985 |
|
SU1303405A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Запястье манипулятора | 1990 |
|
SU1754440A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
Изобретение относится к области машиностроения, в частности к роботостроению. Целью изобретения является расширение технологических возможностей путем обеспечения угловых и осевых перемещений схвату. Запястье установлено в корпусе 1 руки манипулятора и снабжено спиральной пружиной 7, прикрепленной одним концом к корпусу 1, а другим - к схвату. Шатун 5 шарнирно связан с корпусом 1 и цилиндром 4. Во время работы запястье имеет возможность за счет наличия пружины 7 и шатуна совершать свободно угловые осевые линейные и поворотные движения. 2 ил. с S СЛ
CPl/.2
| Патент США № 3984006, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
