(54) ЗАХВАТ ДЛЯ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подъема и транспортирования захватным устройством пакетов штучных грузов прямоугольной формы и захватное устройство для его осуществления | 1978 |
|
SU870332A1 |
| Захватное устройство для труб | 1974 |
|
SU560812A1 |
| Устройство для изготовления рулонных пружин | 1976 |
|
SU654329A1 |
| Устройство для подачи полосового и ленточного материалов в зону обработки | 1987 |
|
SU1489900A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2004 |
|
RU2278813C2 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| Захватное устройство для полых кольцевых изделий | 1978 |
|
SU1022934A1 |
| Устройство для изготовления рулонных пружин | 1983 |
|
SU1148671A1 |
| Устройство для изготовления рулонных пружин | 1990 |
|
SU1743664A1 |
| Захватное устройство | 1982 |
|
SU1017643A1 |

1
Изобретение относится к подьемнотранспортному оборудованию, применяемому на заводах по изготовлению желе.зобетонных изделий, в частности, коротких железобетонных труб.
Известен захват для изделий, содержащий раму, на которой шарнирно закреплены захватные рычаги с поворотными зажимными колодками, соединенные посредством тяг с механизмом их фиксации в нерабочем положении l .
Недостатком известного устройства является невозможность одновременного захвата двух кольцевых изделий.
, Цель изобретения - одновременный захват двух кольцевых изделий, распапоженных одно в другом.
Данная цель достигается тем, что захват снабжен стержнем с продольным пазом, соединенным с траверсой, и посредством пальца, расположенного в упомянутом пазу, - с механизмом фиксации, я дополнительными поворотными зажимными колодками, закрепленными в средней части захватных ршчагов с противоположной стороны от колодок, закрепленных на концах рычагов, при этом захватные рычаги закреплены на раме с возможностью горизонтального перемещения.
Кроме того, с целью повышения на- дежности захвата, стержень соединен с траверсой шарнирно.
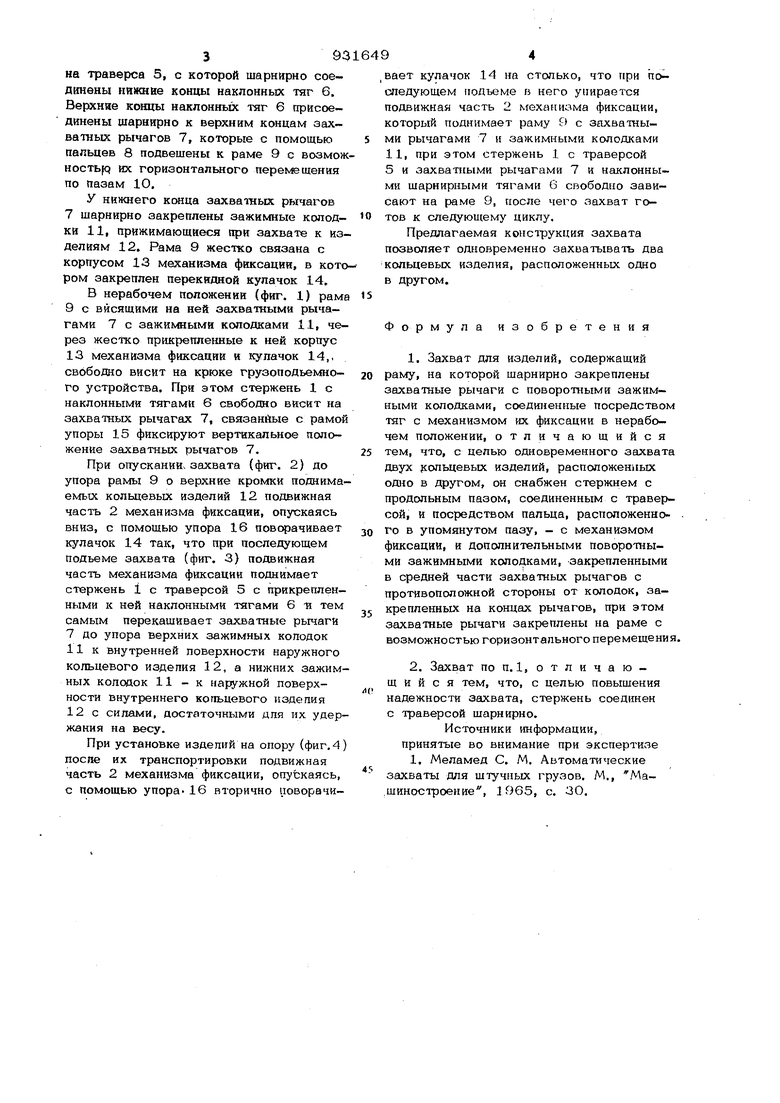
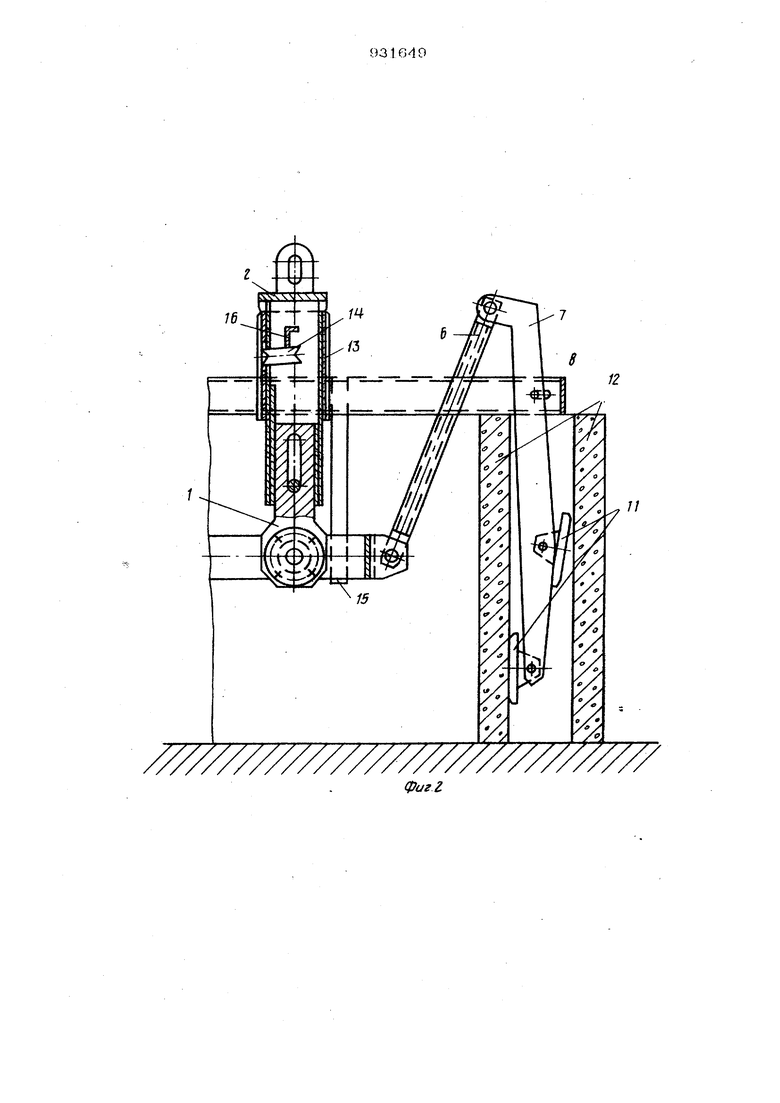
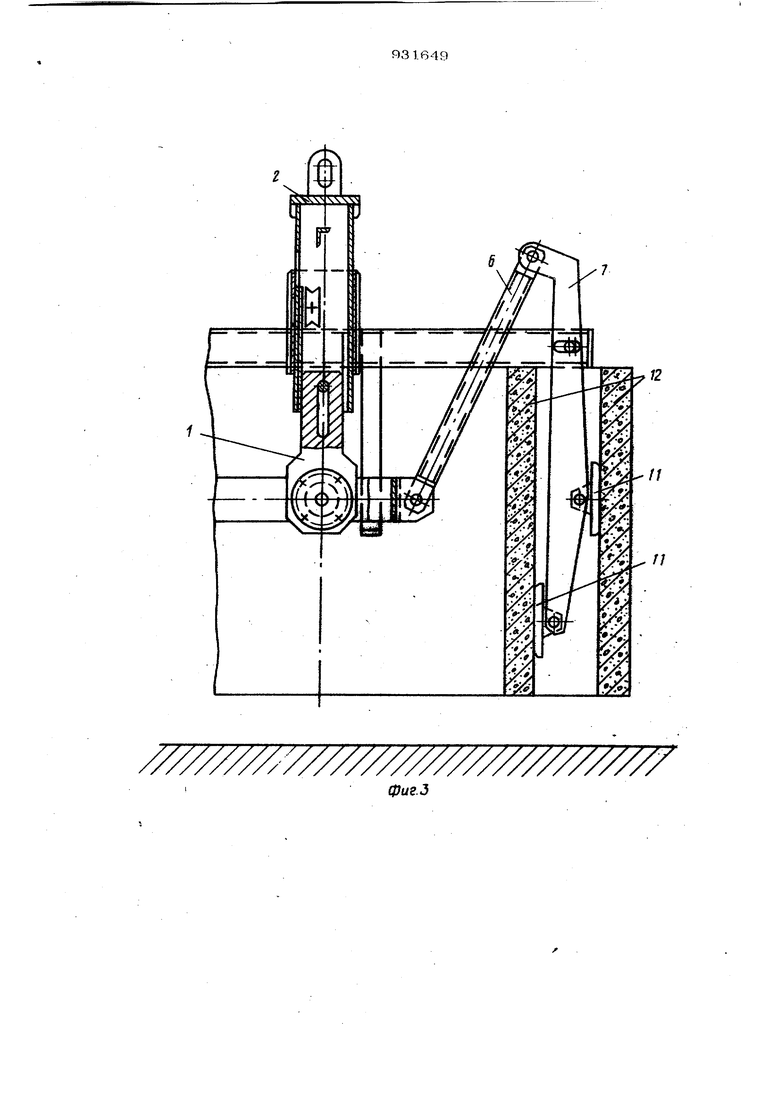
На фиг. 1 взображен захват в нерабо10чем положении; на фиг. 2 - то же, в момент его переключения в рабочее положение перед захватом труб; на фиг. 3 то же, с поднятыми изделиями; на фиг. 4то же. в момент его переключения в
15 нерабочее, положение.
Захват состоит из стержня 1 с продольным пазом, связанного с подввжной частью 2 механизма фвксацив захвата в нерабочем попоженва, подвешенной к
20 крюку грузооодьемного устройства посредством пальца 3 .
К нвжнему концу центрального стержня 1 на сферическом шарнвре 4 подвеше на траверса 5, с которой шарнирно сое динвны нижние концы наклонных тяг 6. Верхние концы наклонньк тяг 6 присоединены щарнирно к верхним концам захватных рычагов 7, которые с помощью аапьцев 8 подвешены к раме 9 с возмож HocTbfq их горизонтального перемещения по пазам 10. У нижнего конца захватных рычагов 7 шарнирно закреплены зажимные колодкн 11, прижимающиеся при захвате к из делиям 12. Рама 9 жестко связана с корпусом 13 механизма фиксации, в кото ром закреплен перекншюй кулачок 14, В нерабочем положении (фиг. 1) рам 9 с висящими на ней захватными рычагами 7 с зажимными колодками 11, через жестко прикрепленные к ней корпус 13 механизма фиксации и кулачок 14,, свободно висит на крюке грузоподьемного устройства. При этом стержень 1 с наклонными тягами 6 свободно висит на захватных рычагах 7, свяаанйые с рамой упоры 15 фиксируют вертикальное положение захватных рычагов 7, При опускании, захвата (фиг. 2) до упора рамы 9 о верхние кромки поднима емых кольцевых изделий 12 подвижная часть 2 механизма фиксации, опускаясь вниз, с помощью упора 16 поворачивает кулачок 14 так, что при последующем подъеме захвата (фиг. 3) подвижная часть механизма фиксации поднимает стержень 1 с траверсой 5 с прикрепленными к ней наклонными тягами 6 и тем самым перекашивает захватные рычаги 7 до упора верхних зажимных колодок 11 к внутренней поверхности наружного кольцевого изделия 12, а нижних зажим ных колодок 11 - к наружной поверхности внутреннего кольцевого изделия 12с сипами, достаточными для их удер жания на весу. При установке изделий на опору (фиг. 4 поспе их транспортировки подвижная часть 2 механизма фиксации, опускаясь, с помощью упора. 16 вторично поворачивает кулачок 14 на столько, что при последующем подъеме ь него упирается подвижная часть 2 механизма фиксации, который поднимает раму 9 с захватными рычагами 7 и зажимными колодками 11, при этом стержень 1 с траверсой 5 и захватными рычагами 7 и наклонными шарнирными тягами 6 свободно зависают на раме 9, после чего захват готов к следующему циклу. Предлагаемая конс1рукция захвата позволяет одновременно захватывать два кольцевых изделия, расположенных одно в другом. Формула изобретения 1.Захват для изделий, содержащий раму, на которой шарнирно закреплены захватные рычаги с поворотными зажимными колодками, соединенные посредством тяг с механизмом их фиксации в нерабочем положении, отличающийся тем, что, с целью одновременного захвата двух кольцевых изделий, расположенных одно в другом, он снабжен стержнем с продольным пазом, соединенным с траверсой, и посредством пальца, расположенного в упомянутом пазу, - с механизмом фиксации, и дополнительными поворотными зажимными колодками, закрепленными в средней части захватных рычагов с противоположной стороны от колодок, закрепленных на концах рычагов, при этом захватные рычаги закреплены на раме с возможностью горизонтального перемещения. 2.Захват по п.1, о т л и ч а ю щ и и с я тем, что, с целью повышения надежности захвата, стержень соединен с траверсой шарнирно. Источники информации, принятые во внимание при экспертизе 1. Меламед С. М. Автоматические захваты для штучных грузов. М., Ма,шинос1роеиие, 1965, с. ЗО.
///////////////////////////////////
///////////////////
фиг.З
// //////////////////////////
фиг.Ч
