( ПЕРЕДАЧА ВИНТ-ГАЙКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи шпинделей многошпиндельного сверлильного станка | 1983 |
|
SU1140896A1 |
| Беззазорная шариковая винтовая передача | 1986 |
|
SU1364800A1 |
| УЗЕЛ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ПЛАНЕТАРНОЙ РОЛИКОВИНТОВОЙ ПЕРЕДАЧИ | 1998 |
|
RU2140592C1 |
| Прибор для контроля механизмов подачи станков | 1981 |
|
SU986612A1 |
| ГАЙКА ШАРИКОВОЙ ВИНТОВОЙ ПЕРЕДАЧИ | 2007 |
|
RU2362926C2 |
| ПЛАНЕТАРНАЯ РОЛИКОВИНТОВАЯ ПЕРЕДАЧА | 2002 |
|
RU2204070C1 |
| Механизм перемещения суппорта токарного станка | 1978 |
|
SU740408A1 |
| Устройство для зажима подвижного узла | 1977 |
|
SU651934A1 |
| Устройство поступательного перемещения исполнительного органа | 1988 |
|
SU1702023A1 |
| Шариковый винтовой механизм | 1985 |
|
SU1263947A1 |
1
Изобретение относится к машиностроению, а именно к передачам винтгайка качения, работающим в условиях повышенных перекосов, смещений и прогибов.
Известна передача винт-гайка качения, в которой, с целью снижения требований к точности монтажа и повышения долговечности передачи, гайка установлена на упругом подвесе, выполненном в виде односторонне закрепленной гильзы с прорезями вдоль оси винта .
Недостаток известной конструкции передачи винт-гайка качения - низкая осевая жесткость, поскольку упругий подвес закручивается при действии осевой нагрузки, что обусловливает осевое смещение винта относительно гайки.
Цель изобретения - повышение долговечнос ти передачи в условиях повышенной осевой жесткости.
Указанная цель достигается тем, что в передаче винт-гайка, содержащей корпус, винт, две полугайки и упругий подвес для соединения корпуса с подвижным органом станка упругий подвес выполнен в виде четного количества по крайней мере двух, параллельно установленных концентричных колец, соединенных между собой дугообразными плоскими пружинами ,
10 расположенными так, что пружины одной пары колец перекрещиваются с пружинами другой пары колец.
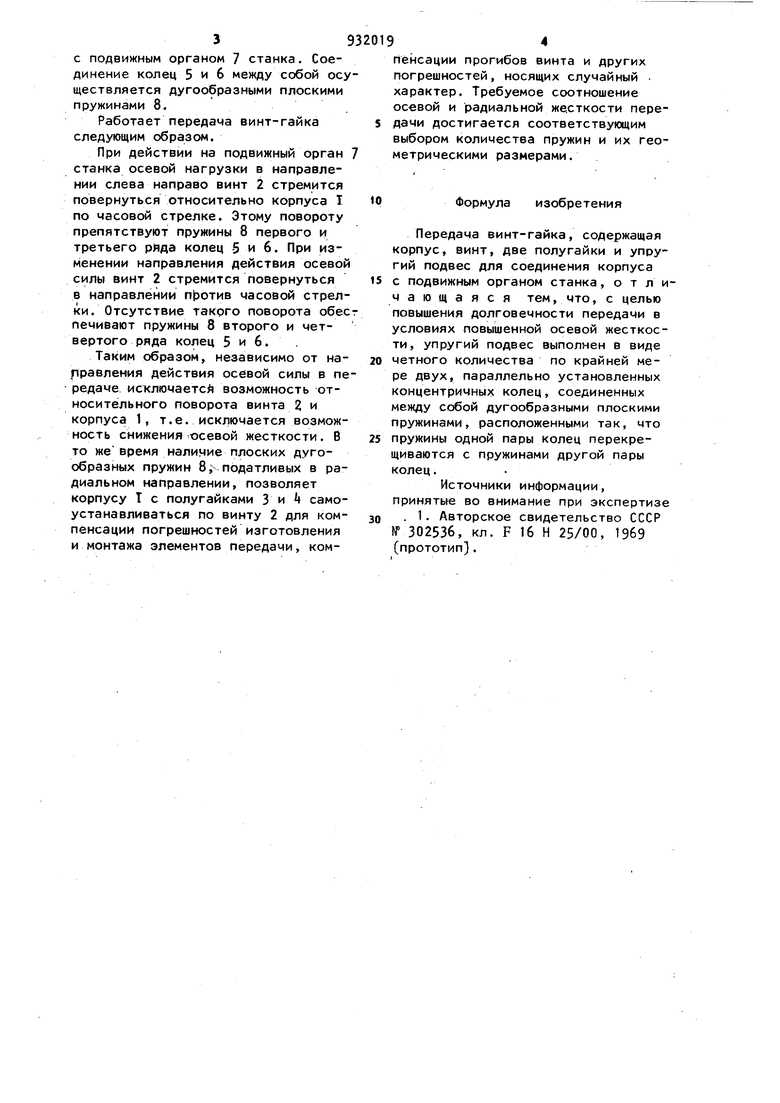
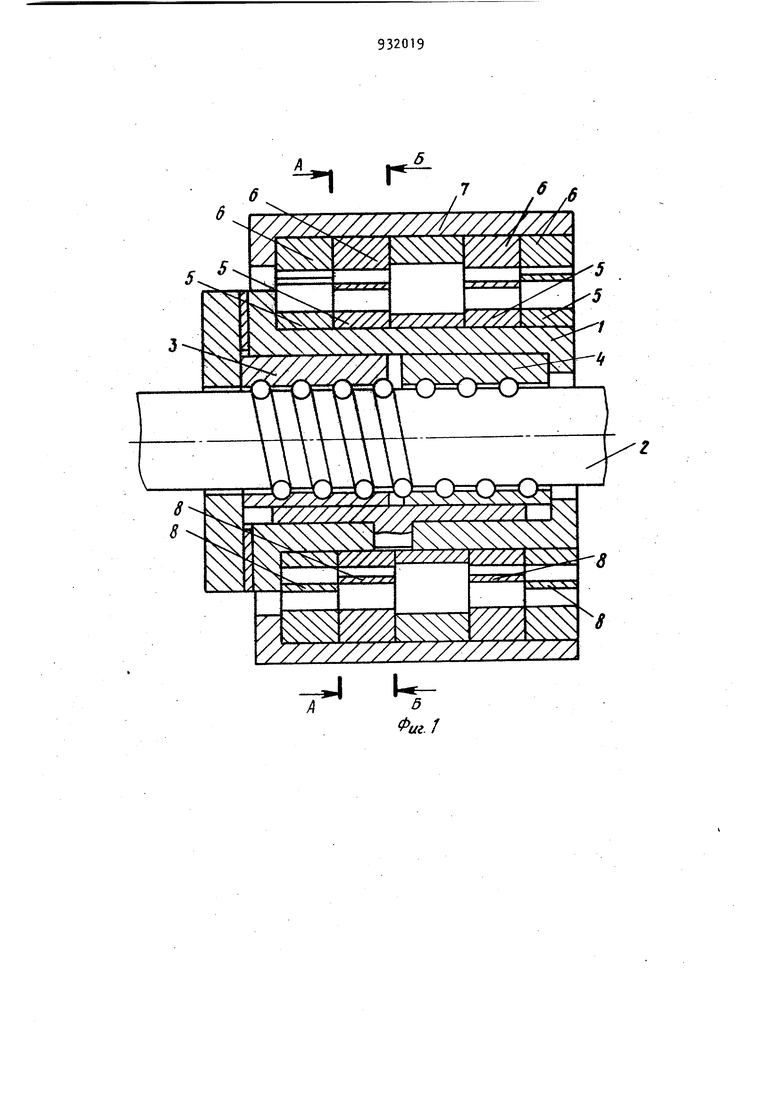
На фиг.1 изображена передача винт-гайка; на фиг. 2 - разрез А-А
15 на фиг.1; на фиг. 3 - разрез Б-Б на фиг.1.
Передача винт-гайка содержит корпус 1, винт 2, расположенные в корпусе 1 две полугайки 3, j и
20 упругий подвес, представляющий собой в данном случае четыре пары концентричных колец 5 и 6, посредством которых корпус 1 соединяется
с подвижным органом 7 станка. Соединение колец 5 и 6 между собой осуществляется дугообразными плоскими пружинами 8.
Работает передача винт-гайка следующим образом.
При действии на подвижный орган станка осевой нагрузки в направлении слева направо винт 2 стремится повернуться относительно корпуса Т по часовой стрелке. Этому повороту препятствуют пружины 8 первого и третьего рйда колец 5 и 6. При изменении направления действия осевой силы винт 2 стремится повернуться в направлении п)отив часовой стрелки. Отсутствие такого поворота обес печивают пружины 8 второго и четвертого ряда колец 5 и 6. .
Таким образом, независимо от нарравления действия осевой силы в передаче исключаете возможность относительного поворота винта Z и корпуса 1, т.е. исключается возможность снижения осевой жесткости. В то жевремя наличие плоских дугообразных пружин 8,Vподатливых в радиальном направлении, позволяет корпусу Т с полугайками 3 и самоустанавливаться по винту 2 для компенсации погрешностей изготовления и монтажа элементов передачи, компенсации прогибов винта и других погрешностей, носящих случайный . характер. Требуемое соотношение осевой и радиальной жесткости передачи достигается соответствующим выбором количества пружин и их геометрическими размерами.
Формула изобретения
Передача винт-гайка, содержащая корпус, винт, две полугайки и упругий подвес для соединения корпуса
с подвижным органом станка, отличающаяся тем, что, с целью повышения долговечности передачи в условиях повышенной осевой жесткости, упругий подвес выполнен в виде
четного количества по крайней мере двух, параллельно установленных концентричных колец, соединенных между собой дугообразными плоскими пружинами, расположенными так, что
пружины одной пары колец перекрещиваются с пружинами другой пары колец.
Источники информации, принятые во внимание при экспертизе
. 1 Авторское свидетельство СССР № 302536, кл. F 16 Н 25/00, 1969 (прототип).
U6
Фиг.
Фаг. 2
Фиг. 5
