(54) УСТРОЙСТВО ДЛЯ ЗАЖИМА паДВЙЖНОГО УЗЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения подвижного узла | 1976 |
|
SU729029A1 |
| Устройство для зажима подвижного узла | 1980 |
|
SU984799A1 |
| Устройство для зажима подвижного узла | 1973 |
|
SU452468A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| ГАЙКА ШАРИКОВОЙ ВИНТОВОЙ ПЕРЕДАЧИ | 2007 |
|
RU2362926C2 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| ХОДОВАЯ ГАЙКА МЕХАНИЗМА ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2013 |
|
RU2542787C1 |
| Узел крепления корпуса гайки ходового винта | 1987 |
|
SU1424980A1 |
| Рабочий орган станка | 1983 |
|
SU1144832A1 |
| Самоходный фрезерный станок | 1978 |
|
SU753559A1 |
. Изобретение относится к мащиностроё;нию и может найти применение в станках и машинах, подвижные уэпы которых необхооимо надежно зафиксировать в заданной позиции, а также в станках и машинах с направлякяцймв вс0х типов.
Известны устрсйства дяя зажима подвижного узпа, приводимого от шариковинтовой пары, содержащее пакет тарельчатых пружин и механизм oTKHMafij.
Недостатком указанного устройства является то, что при напичии зазора в ва{т&о-винтовой napei возникающего в процессе работы устройства, подвижный узел в напра:в11ении перемещений остается не зажатым, в результате чего не только снижается точность позиаионированвя, ао и резко снижается жесткость йрквода, которая-является основой устсЯчивоств и точности процесса обработки.
йеяыо данного изобретения является пстышевне надежности и точности зажима подвижного узла за счет создания самб-
тормозящего беззазорного соединения подвижного узла с родовым винтом привода.
Для этого KopnyCj. гвыполнен П-образным, жестко соединен с подвижным узлом и содержит вертикальные щеки, которые выполнены в направлении, перпендикулярном к направлению перемещения подвижного узла, упругими, а в направ юнии перемещения указанного узла -жесткими, и соединены между собой посредством винта, на одном конце которого размещен пакет тарельчатых пру- . жин, причем устройство снабжено двумя полугайками, каждая из которых прикреплена к соответствукмцей щеке и контактирует с ходовым винтом привода, а механизм отжима- свободно установлен на винте между щеками.
Механизм отжима выпотшен в виде гидроцилиндра.
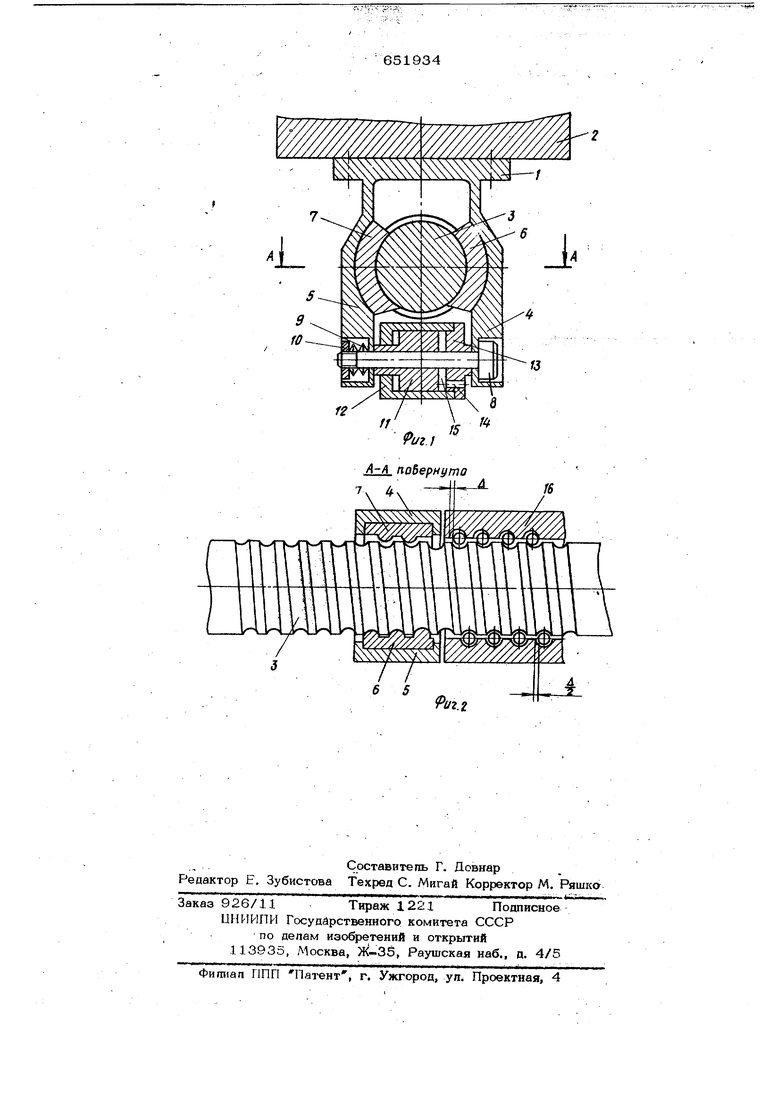
На фиг. 1 изображено устройство к направлению перемещения подвижного узла,поперечное сечение; на фиг, 2 | азред А-А на фиг. 1 (нижняя часть уэеп зажат, верхняя - узеп отжат).
Устройство состоит на П-образного (корпуса 1, ёстко прикрёпгюйнбгЬ к поп вижному узпу 2 соосно с ходовым винтом 3. Вертикальнью щеки корпуса 4 н 5 выполнены в виде упругих элементов с малой жесткостью в направлении перпендикулярном направлению перемещения подвижного узла 2 и жесткие в направшяий перемещения подвижного узла 2. К щекам жестко прикреплены полугайки 6 и 7, контактирующие с ходовым винтом 3. Нижние концы щек 4 и 5 соепинены винтом 8 и стямуты усилием npSHBapHtenbHo сжатого nianeia тарельчатых пружин 9 и гайкой 10. Между щеками на винт посажен поршень 11 в сборе с гидооцилинщзом 12 и крышкой
Устройство работает следукяцим образом..
Под действием усилия прёдвйртатёльно сжатого пакета пружин 9 вертикальные щеки 4 и 5 корпуса 1 и прикрепленные к ним пояугайки 6 и 7 пёрёШ-i ща1(йрсй навстречу iipyt другу, охватывают ходовой винт 3, удержйШяё1гВдт проворота и обеспечивая беёййэбрйое самотормозйщее соединение подвижного узла 2 с ходовым винтом 3. Подвижный узел зажат.
Дяа отжима пошзижного узла жидкость подается через отверстие 14 в рабочую попорть 15 гищэбципиндра 12, при этом tiopwevb 11 и гищэоцилиндр 1 с крышкой 13 перемещаются в йрртивогкШожнызс 1ашрав1 ййШ/ сжимают Тлакёт пружин Q и юыводот полугайки 6 и 7 из соприкосновения с ходовым винтом 3 обеспечивая между ними гарантированны зазсф. Подвижный узел отжат.
Такбе кьгпопнение зажимного устройства обеспечивает на дежйоё жёсткое фвкс1фовайие подвижного узла в заданной позиаии независимо от прикласшгвае мых усигшй в процессе обработки. При нашчив в передаче винт 3 - гайка 16 зазора :Д устройство, охватывая хоДоЬОЙ вввт, смещает подвижный узел на
еличину равную -j- и ходовой винт определяет точность позиционирования. При зажиме узла эта точность сох|раняется, а в сравнении с другими зажимными устройствами повышается на величину; равную - и обеспечивается позиционирование с подходом в заданное положение с любой стороны. Возможность обеспечения смешанного трения (скольжениякачения) в передаче винт гайка за счет охвата ходового винта полугайками с Заданным усилием Повышает жесткость передачи и демпферирование в процессе рабочего перемещения подвижного узла.
Формула изобретения
Ж направлении, перпендикулярном к направлению перемещения подвижного узла, упругийи, а в направпении перемещения указанного узла - жесткими, и соединены между собой посредством винта, на одном конце которого размещен пакет тарельчатых пружин, причем устройство снабжено двумя попугайками, каждая из которых прикреплена к соответствующей щеке и контактирует с хоДовым винтом привода, а механизм отжима свободно установлен на винте между щеками.
Источники информации, принятые во внимание при экспертизе
гг
Puz.J повернуто
16
