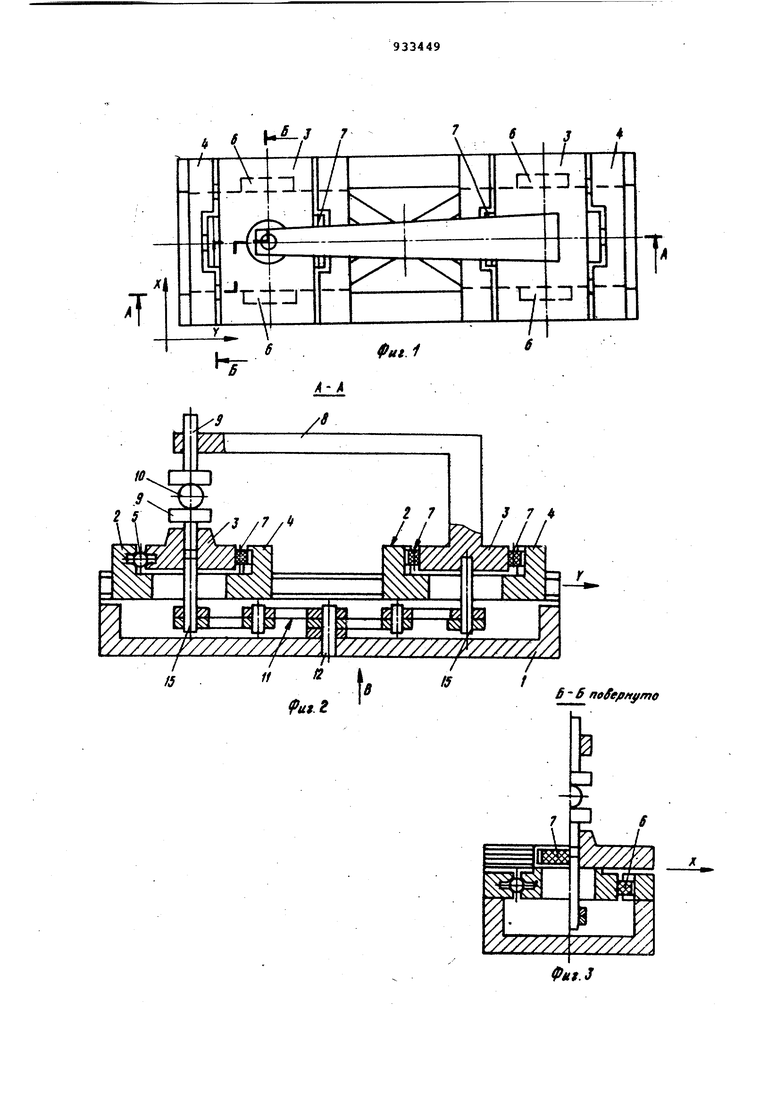
нбвлен держатель 9. Аналогичным держателем 9 снабжена и вторая верхняя каретка 3. Между держателями 9 помещена исследуемая сфера 10. Верхние каретки 3 координатных приводов 2 соединены с пантографом 11, включающим ось 12 шарнира, закрепленную на основании 1, рычаги 13,14 и подвижные оси 15 шарниров 16, сопряженные с верхними каретками 3.
Работает микроманипулятор следующим образом.г
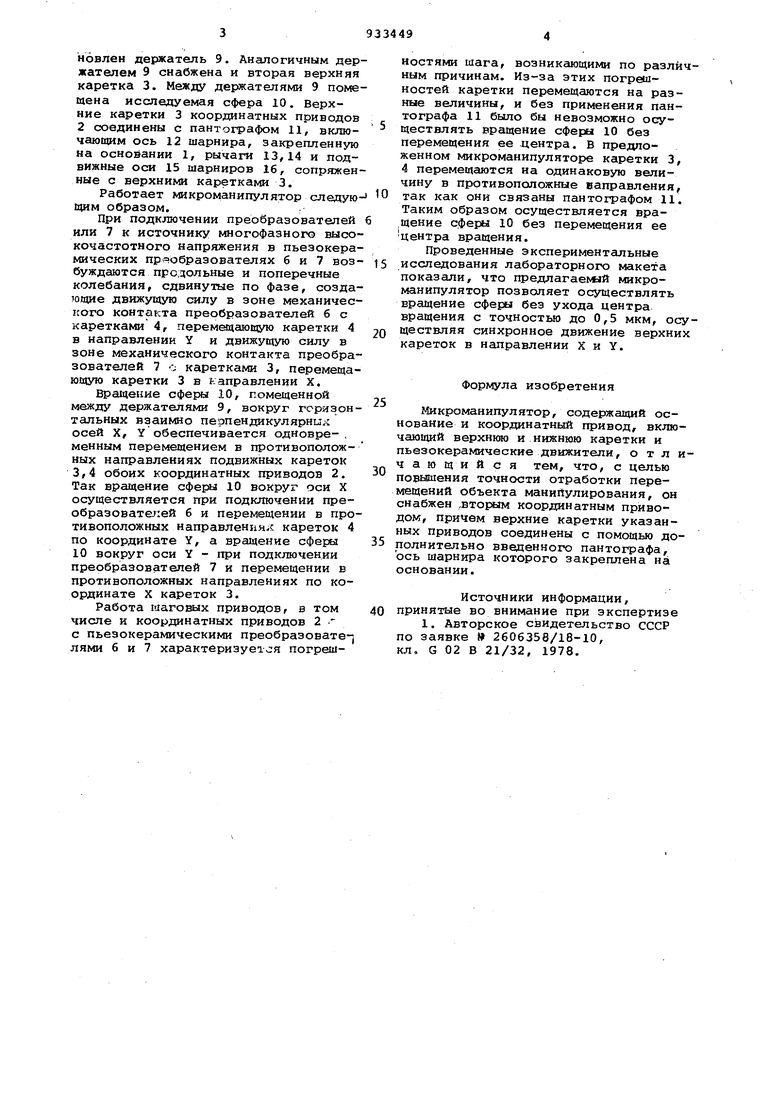
При подключении преобразователей или 7 к источнику многофазного высокочастотного напряжения в пьезокерамических преобразователях б и 7 возбуждаются продольные и поперечные колебания, сдвинутые по Фазе, создающие движущую силу в зоне механического контакта преобразователей б с каретками 4, переминающую каретки 4 в направлении Y и движущую силу в зоне механического контакта преобразователей 7 о каретками 3, перемещающую каретки 3 в направлении X.
Вращение сферы 10, помещенной между держателями 9, вокруг горизонтальных взаимно перпендикулярных осей X, У обеспечивается одновре-. менным перемещением в противоположных направлениях подвижных кареток 3,4 обоих координатных приводов 2. Так вращение сферы Ю вокруг оси X осуществляется при подключении преобразоватег:ей 6 и перемещении в противоположных направлен 11 я; кареток 4 по координате Y, а вращение 10 вокруг оси Y - при подключении преобразователей 7 и перемещении в противоположных направлениях по координате X кареток 3.
Работа шаговых приводов, в том числе и координатных приводов 2 с пьевокерамическими преобразователями 6 и 7 характеризуеач:я погрешностями шага, возникающими по разлиным причинам. Из-за этих погрваностей каретки перемещаются на разные величины, и без применения пантографа 11 было бы невозможно осуществлять вращение сферы 10 без перемещения ее центра. В предложенном микроманипуляторе каретки 3, 4 перемещаются на одинаковую величину в противоположные ваправления, так как они связаны пантографом 11. Таким образом осуществляется вращение сфера 10 без перемещения ее центра вращения.
Проведенные экспериментальные исследования лабораторного макета показали, что предлагаемой микроманипулятор позволяет осуществлять вращение сферы без ухода центра вращения с точностью до 0,5 мкм, осществляя синхронное движение верхни кареток в направлении X и Y.
Формула изобретения
Микроманипулятор, содержащий основание и координатный привод, включающий верхнюю и нижнюю каретки и пьезокерамические движители, отличающийся тем, что, с целью повышения точности отработки перемещений объекта манипулирования, он снабжен .BTOJMM координатным приводом, причем верхние каретки указанных приводов соединены с помощью доП олнительно введенного пантографа, ось шарнира которого закреплена на основании.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2606358/18-10, кл. G 02 В 21/32, 1978.
I IS
11 s
U9.Z
y
/ f
15
S б ncffflftyme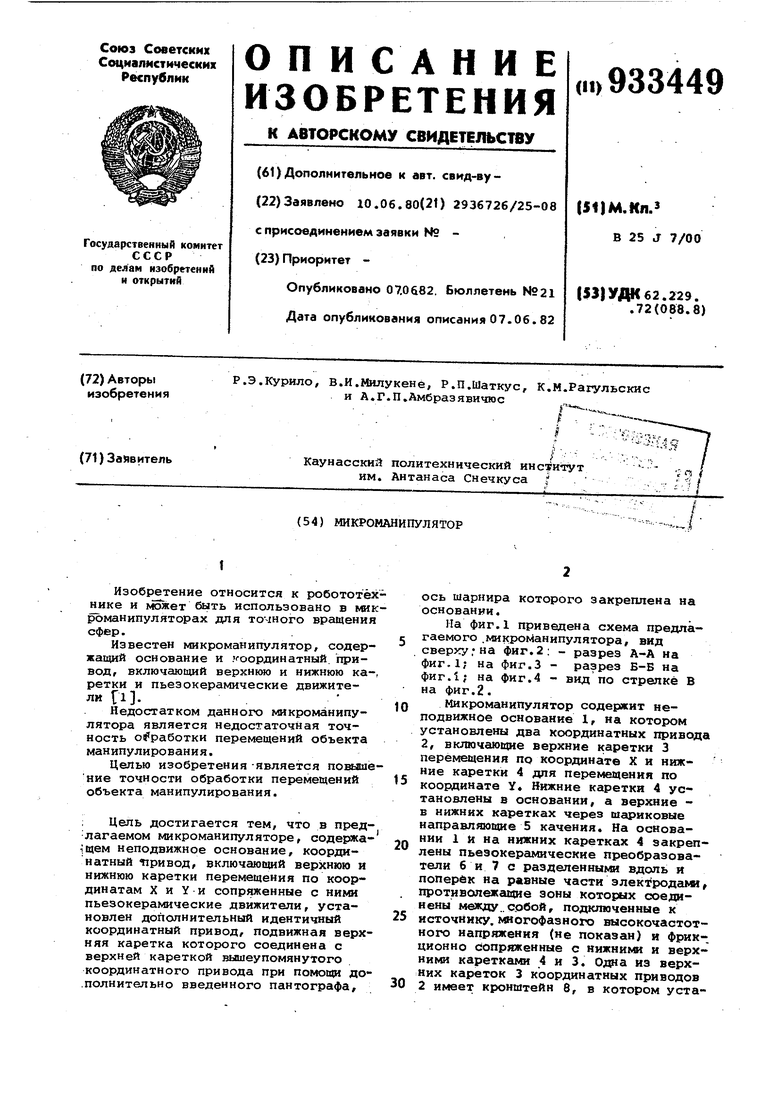
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ ФОТОТРАНСФОРМАТОР | 1973 |
|
SU409070A1 |
| Рычажный механизм для параллельного перемещения и поворота горизонтально расположенной пластины | 1978 |
|
SU949256A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Микроманипулятор | 1980 |
|
SU960004A1 |
| КООРДИНАТНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1985 |
|
SU1840370A1 |
| Координатный вибропривод | 1979 |
|
SU851563A1 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| Микроманипулятор для сферических объектов | 1986 |
|
SU1366385A1 |
| ПРИБОР ДЛЯ ОБРАБОТКИ СТЕРЕОПАР | 1968 |
|
SU221327A1 |
| Предметный столик растрового электронного микроскопа | 1987 |
|
SU1522318A1 |