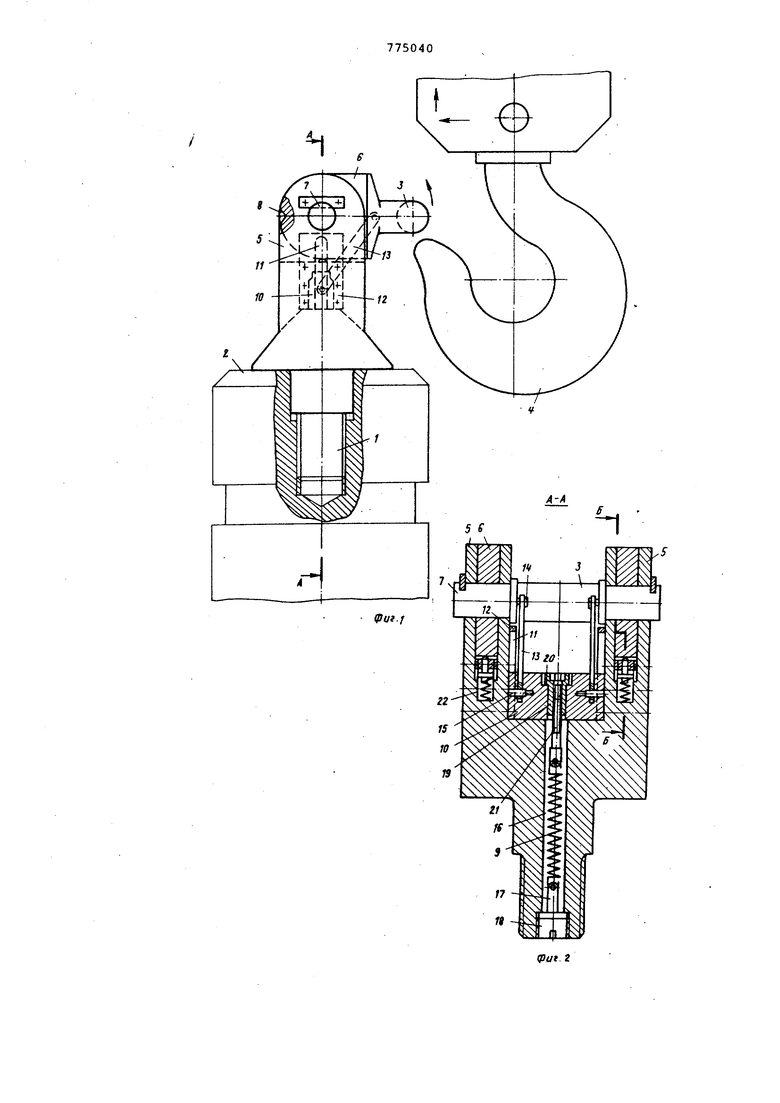
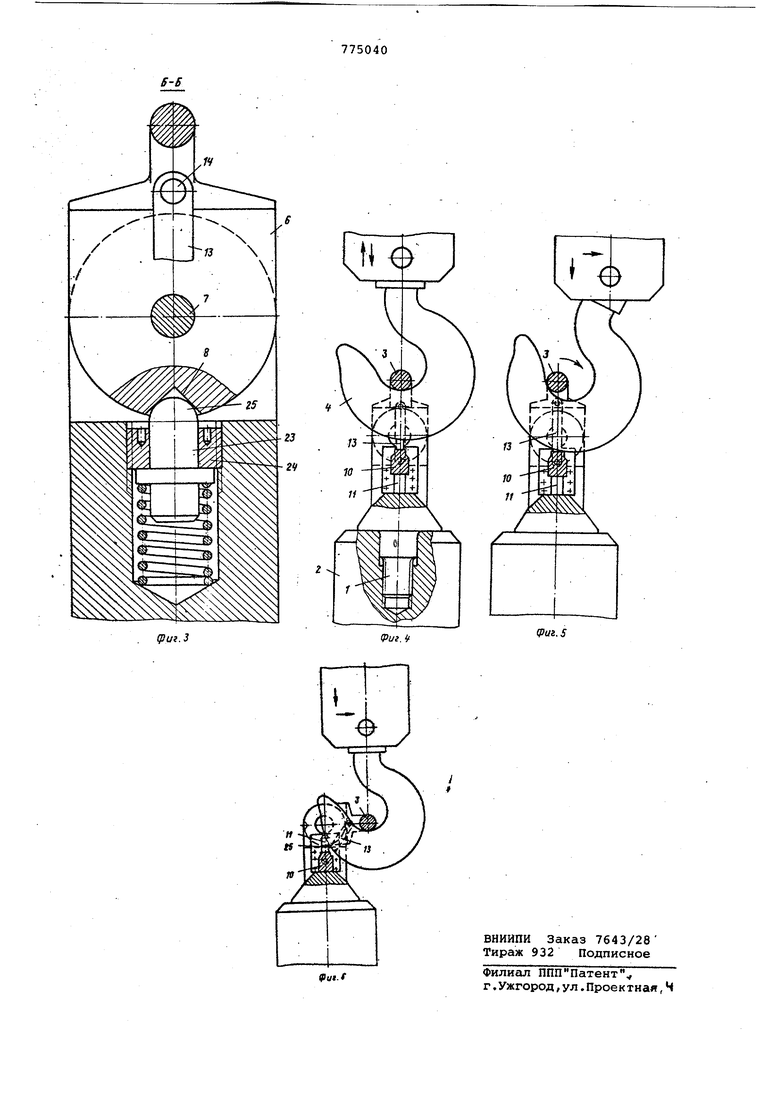
Изобретение относится к области подъемно-транспортного машиностроения, в частности к захватным у ртройствам для изделий без монтажных петель и приспособлений. Известен рым-болт для подъема изделий , содержащий хвостовик, ввинчиваемый в изделие, и скобу для навешивания на крюк грузоподъемного механизма l . Однако при использовании известного рым-болта невозможно обеспечить автоматическое освобождение изделия. Целью изобретения является обеспечение автоматического освобозкдения изделия. Это достигается тем, что предлага емый рым-болт снабжен параллельньми вертикальными пластинами и подпружиненным ползуном, расположенным между ними, а скоба закреплена на пластинах с возможностью ее поворота и связана с подпружиненным ползуном шарнирными тягами, при этом на пластинах установлен фиксатор для удержания скобы в требуемом положении. Кроме того, фиксатор выполнен в виде подпружиненных пальцев, взаимодействующих с гнездами, выполненньлчи на скобе. На фиг. 1 показан предлагаемый рым-болт, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2} на фиг. 4 - момент подъема транспортирования и опускания изделия; на фиг. 5 - момент принудительного расфиксирования рыма грузовым крюком для его освобождения; на фиг. 6 - отвод крюка. Стрелки указывают направление перемещений. Рым-болг содержит хвостовик 1, ввинчиваеквлй в изделие 2, и скобу 3 для навешивания на крюк 4 грузоподъемного механизма. Рым-болт имеет параллельные вертиксшьные пластины 5, к которым консолями 6 на осях 7 шарнирно прикреплена скоба 3, и служит для бесстропного згисвата изделия крюком 4 грузоподъемного механизма. На скобе 3. выполнены конусные отверстия 8, KOTOfSjie служат для фиксации последней в рабочем положении при подъеме и опускании изделия. Между пластинами 5 расположен подпружиненный пружиной 9 растяжения ползун 10, перемещающийся в продоль-, ных направляющих пазах 11 планок 12, прикрепленных к пластинам 5, причем ползун 10 связан со скобой 3 шарнирными тягами 13. Рым-болт работает следующим образом. При вертикальном положении изделия 2 (фиг. 1 и 2) скоба 3 должна быть повернута на 90 от вертикальной оси, а ползун 10 находится в крайнем нижнем положении. Грузовой .крюк 4 грузоподъемным механизмом опу скают внизи центрируют по изделию, затем вручную крюк на подвеске поворачивают и устанавливают в профиль,ной плоскости. Крюк поднимают зевом до уровня скобы 3, горизонтальным перемещением заводят в просвет между пластинами 5, .а затем, совмещая вертикальные и горизонтальные перемещения, заводят крюк до совмещения оси крюка с осью изделия. При этом крюк 4 захватывает скобу 3 и поворачивает ее на 90° , пальцы 23 сферической - поверхностью 25 входят в конусные от верстия 8 консолей 7 скобы 3 и фиксируют ее, а ползун 10 с помощью тяг 13 поднимается вверх и взводит пружи ну 9. Если при опускании изделия 2 нижним концом в посадочное место про исходит заклинивание за счет перекосов , то расфиксирования скобы 3 не происходит, она по-прежнему занимает вертикальное положение. Если происхо дит наклон изделия 2 и расфиксирование скобы 3, то за счет сжатия пружи ны 9 скоба 3 сама с силой прижимается к крюку 4 в его зеве и произвольного выпадения петли рым-болта из крюка не происходит. Принудительное размыкание на высоте обеспечивается путем смещения оси грузового крюка 4 и опускания ег вниз. За счет появления плеча и смещенной массы образуется вращающий момент, который способен расфиксировать скобу З.с механизмом 22 фиксаци а пружина 9 поворачивает скобу 3 на одиг; конец каждой из которых (фиг. 2 укряп.аен шарнирно осями 14 на внутре ней по:зерхности консолей б скобы 3,а другой - укреплен шарнирно осями 15 на ползуне 10. Пружина 9 растяжения расположена в осевой расточке 16 хвостовика и одним концом с помощью серьги 17 и гайки 18 сочленена с хвостовиком. Другой конец пружины 9 соединен с ползуном 10 с помощью резьбового э мента регулировки натяжения, состоящего из регулировочной резьбовой втулки 19, размещенной свободно внут ри ползуна и с одной стороны упирающейся буртом 20 в заточку последнего а с другой.- навинченной на резьбовой конец серьги 21. В пластинах под консолями 6 скобы 3 установлены 11еханизмы 22 фиксации ее положения. В отверстиях (фиг. Т) установлены подпружиненные пальцы 23, зафиксированы гайками 24 и служат для фиксации положения скобы при взаимодействии сферической поверхностью 25 с конусными отверстиями 8 в консолях б скобы 3. В рабочем положении (фиг. 4) между гр5лзовым крюком и пластиной имеется зона свободного хода крюка t 25-30 мм. Эта зона необходима для опускания изделия в момент его неопределенного положения. Размыкание грузового крюка 4 (фиг. 5) обеспечено автоматически путем смещения оси его подвески и создания вращающего момента за счет массы крюка 4 и подвески при ослаблении тросов полиспаста грузоподъемного механизма. В расфиксированном положении (фиг. б) скоба 3 расположена под углом 90° относительно продольной оси изделия, при этом ползун 10 отведен в сторону от крюка 4 на 90 и при устойчивом вертикальном положении изделия крюк 4 вертикальным - вниз и горизонтальным перемещениями отводят в сторону. При горизонтальном положении изделия исходное положение скобы 3 такое же, как показано на фиг. 1, только зев крюка 4 подводится с торца р делия при его захвате. Формула изобретения 1.Рым-болт дляподъема изделий., содержащий хвостовик, ввинчиваемый в изделие, и скобу для навешивания на крюк грузоподъемного механизма, отличающийся тем, что/ с целью обеспечения автоматического освобождения изделия, рым-болт снабжен параллельными вертикальными пластинами и подпружиненным ползуном, расположенным мезкду ними, а скоба закреплена на пластинах с возможностью ее поворота и связана с подпружиненным ползуном шарнирными тягами, при этом на пластинах установлен фиксатор для удержания скобы в требуемом положении. 2.Рым-болт по п. 1, отличающий с я тем, что фиксатор выполнен в виде подпружиненных пальцев, взаимодействующих с гнездами, выполненными на скобе. Источники информации, принятые во внимание при экспертизе I. Рякин А.И. и Урванцев Б.А. Строповка грузов. М., Машиностроение, 1968, с. 41, рис. 16, а.
| название | год | авторы | номер документа |
|---|---|---|---|
| Замок для стропа | 1983 |
|
SU1197976A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Устройство для фиксации и транспортирования изделий в нагревательной печи | 1988 |
|
SU1560959A1 |
| Саморасцепляющееся грузозахватное устройство | 1990 |
|
SU1754620A1 |
| Захват для транспортировки штучных грузов | 1981 |
|
SU998292A1 |
| Грузовой крюк | 1989 |
|
SU1791330A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Консольная грузоподъемная траверса | 1988 |
|
SU1652278A1 |
| ГРУЗОВОЙ КРЮК ПАНЬКОВА ДЛЯ ГРУЗОПОДЪЕМНОГО КРАНА | 2000 |
|
RU2207315C2 |
| Захватное устройство для строительных изделий с внутренней полостью | 1983 |
|
SU1127839A1 |