Изобретение может быть использовано Б любом следяш.ем приводе, в котором требуется высокая точность слежения при работе в тял :елых динамических 1режимах, в особенности в системах точного управления инерционными объектами лри наличии только измерителей рассогласования управляющей координаты и объекта управления, в которых использование схем комбинированного управления для уменьшения динамических ошибок невозможно либо из-за трудностей формирования комленсирующих сигналов, либо из-за полного отсутствия дополнительных измерителей.
Известны объединенные следящие системы, содержащие основной и корректирующий каналы, каждый из которых выполнен в виде электронного усилителя, связанного с усилителем-преобразователем, и общую силовую часть.
Недостатком известных следящих систем является недостаточно высо.кая динамическая точность слежения.
Цель изобретения - повышение точности слежения.
Предложенная объединенная электрогидравлическая следящая система отличается от известных тем, что в систему введено гидромеханическое сравнивающее устройство, один вход которого связан с одним из дифференцированных выходов основного и корректирующего каналов, другой вход - с выходом усилителя л орректирующего канала, а выход упомянутого сравнивающего устройства связан со входом электронного усилителя основного канала. Кроме того, сравнивающее устройство выполнено в виде гидромотора-расходомера, связанного через редуктор с датчиком угла поворота.
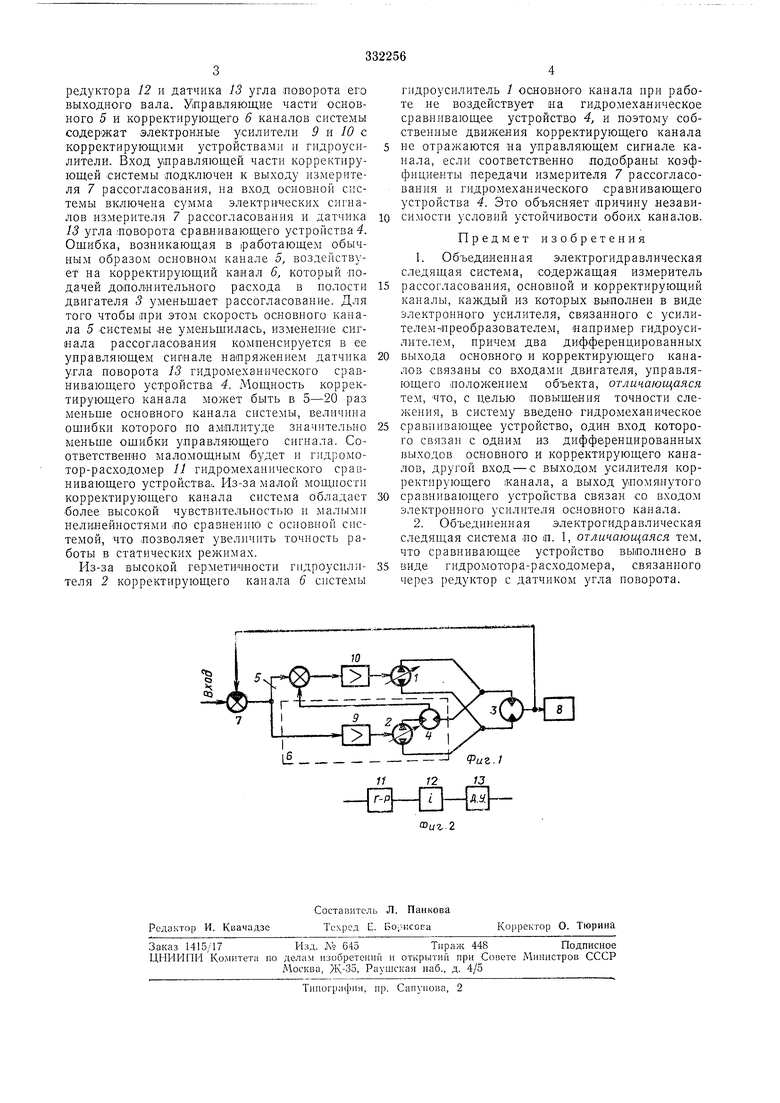
На фиг. 1 изображена принципиальная схема предложенной системы; на фиг. 2 - структура гидромеханического устройства.
Предложенная объединенная электрогидравлическая следящая система включает гидроусилители / и 2; двигатель 3; гидромеханическое сравнивающее устройство 4; основной канал 5; :корректи1рующий канал 6; измернтель 7 рассагласован.ия; объект управления 8; электронные усилители 9 н 10, гидромотор-расходомер 11; редуктор 12; датчик 13 угла поворота.
Объединенная система состоит из двух следящих каналов, основного и корректирующего соответственно с гидроусилителями / и 2.
гидравлически соединенными с общим двигателем 3. В гидравлической цепн корректирующей системы последовательно с гидроусилителем 2 включено гидромеханическое сравнивающее устройство 4, которое состоит из нередуктора 12 и датчика 13 угла поворота его выходного вала. Управляющие части основного 5 и корректирующего 6 каналов системы содержат электронные усилители 9 и 10 с корректирующими устройствами и гидроусилители. Вход управляющей части корректирующей системы подключен к выходу измерителя 7 рассогласования, на вход основной системы включена сумма электрических сигналов измерителя 7 рассогласования и датчика 13 угла лово-рота сравнивающего устройства. Ошибка, возникающая в (работающем обычным образом основном канале 5, воздействует на корректирующий канал 6, который подачей дополнительного расхода в полости двигателя 5 уменьшает рассогласование. Для того чтобы при этом скорость основного канала 5 системы не уменьшилась, измененпе сигнала рассогласования компенсируется в ее управляющем сигнале напряжением датчика угла поворота 13 гидромеханического сравнивающего уст ройства 4. Мощность корректирующего канала может быть в 5-20 раз меньше основного канала системы, величина ошибки которого по амплитуде значительно меньше ошибки управляющего сигнала. Соответственно маломощным будет и гидромотор-расходомер 11 гидромеханического сравнивающего устройства,. Из-за малой мощности корректирующего канала система обладает более высокой чувствительностью и малыми нелршейностями по сравнению с основной системой, что позволяет увеличить точность работы в статических режимах.
Из-за высокой герметичности гидроусилителя 2 корректирующего канала 6 снстемы
гидроусилитель / основного канала ири работе не воздействует на гидромеханическое сравнивающее устройство 4, и поэтому собственные движения корректирующего канала не отражаются на управляющем сигнале канала, если соответственно подобраны коэффициенты передачи измерителя 7 рассогласования и гидромеханического сравнивающего устройства 4. Это объясняет причину независимости условий устойчивости обоих каналов.
Предмет изобретения
1.Объединенная электрогидравлическая следящая система, содержащая измеритель рассогласования, основной и корректирующий каналы, каждый из которых выполнеи в виде электронного усилителя, связанного с усилителем-атреобразователем, например гидроусилителем, причем два дифференцированных выхода основного и корректирующего каналов связаны со входалш двигателя, управляющего положением объекта, отличающаяся тем, ЧТО, с целью повышения точности слежеиия, в систему введено гидромеханическое сравнивающее устройство, один вход которого связан с одним из дифференцированных выходов основного и корректирующего каналов, другой вход-с выходом усилителя корректирующего канала, а выход упомянутого сравнивающего устройства связан со входом электронного усилителя основного канала.
2.Объединенная электрогидравлическая следящая система по п. 1, отличающаяся тем, что сравнивающее устройство выполнено в виде гидромотора-расходомера, связанного через редуктор с датчиком угла поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Объединенная электрогидравлическая следящая система | 1978 |
|
SU684166A2 |
| ОБЪЕДИНЕННАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU347753A1 |
| Электрогидравлическая следящая система | 1980 |
|
SU937796A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЁКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407274A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА РАЗДЕЛЬНОГО ТИПА | 1966 |
|
SU184577A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Электрогидравлический следящий привод | 1980 |
|
SU941701A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
