Изобретение относится к астропри--/ боростроению и может найти применение при управлении крупными и сред- . ними оптическими телескопами.
Цель изобретения - расширение зоны рабочих УГЛОВ системы.
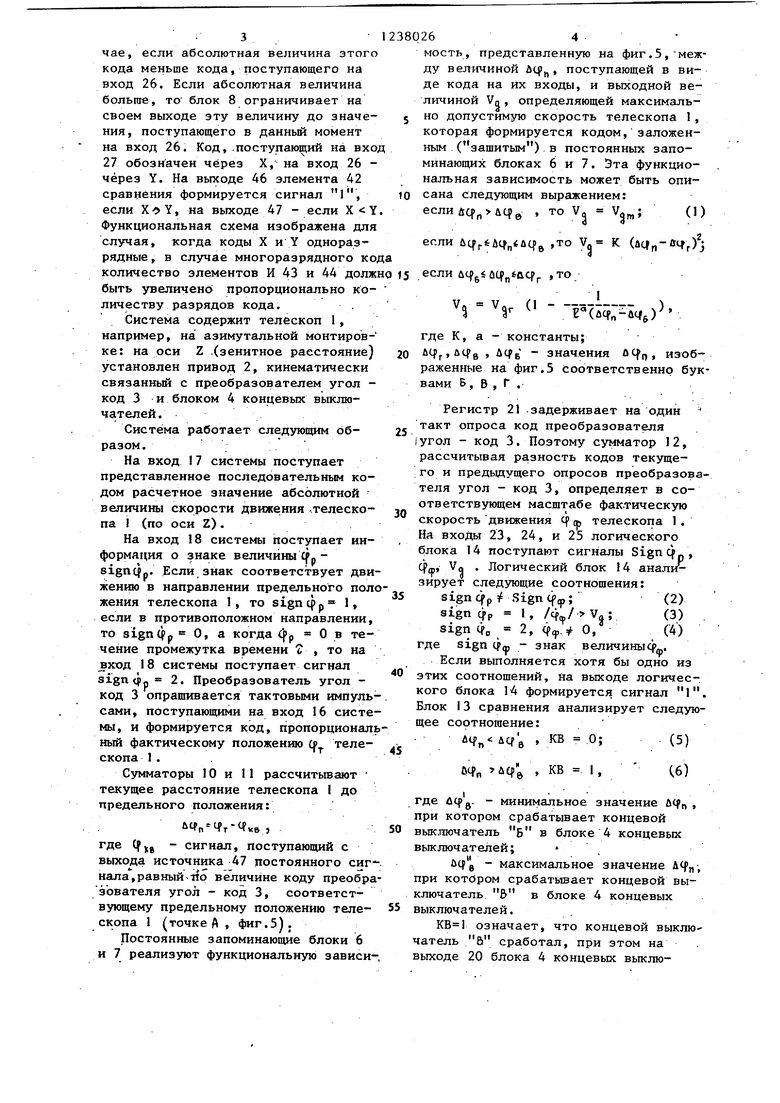
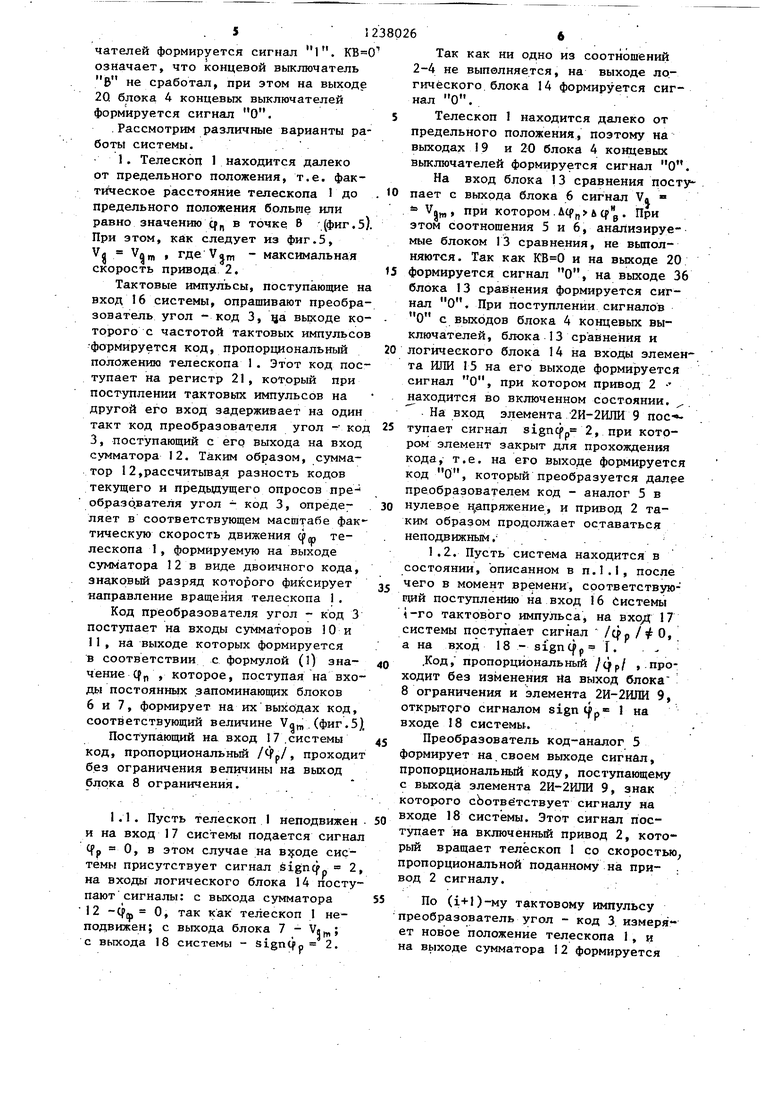
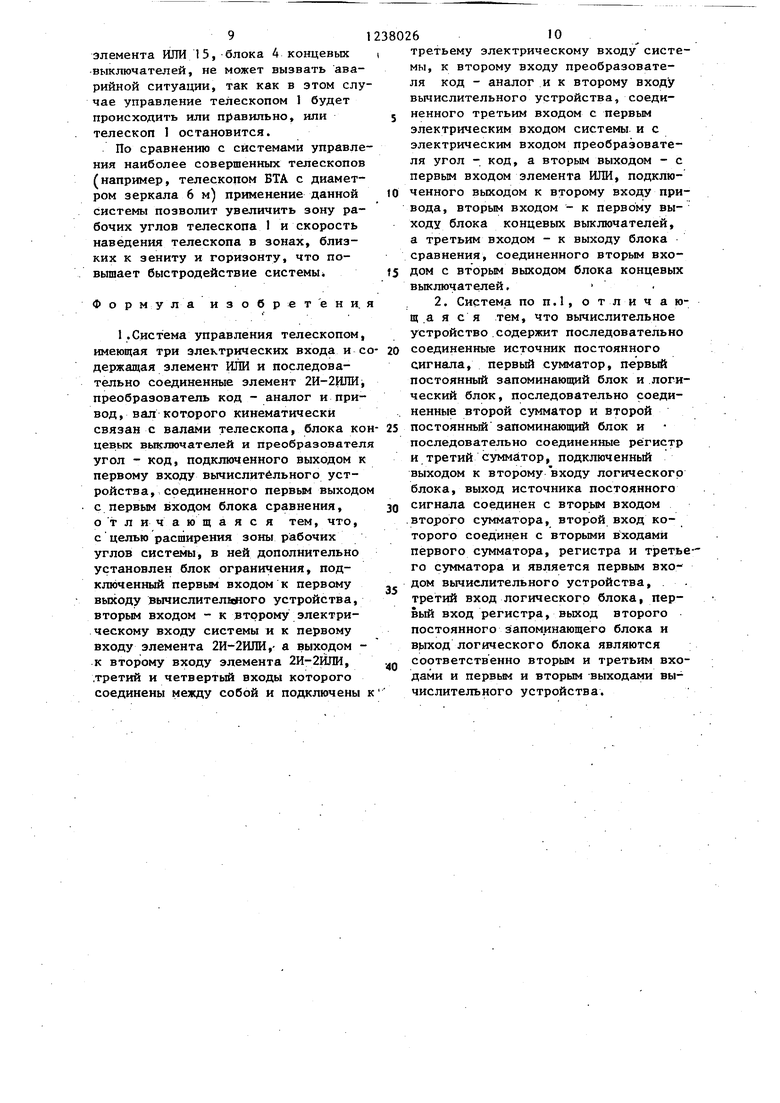
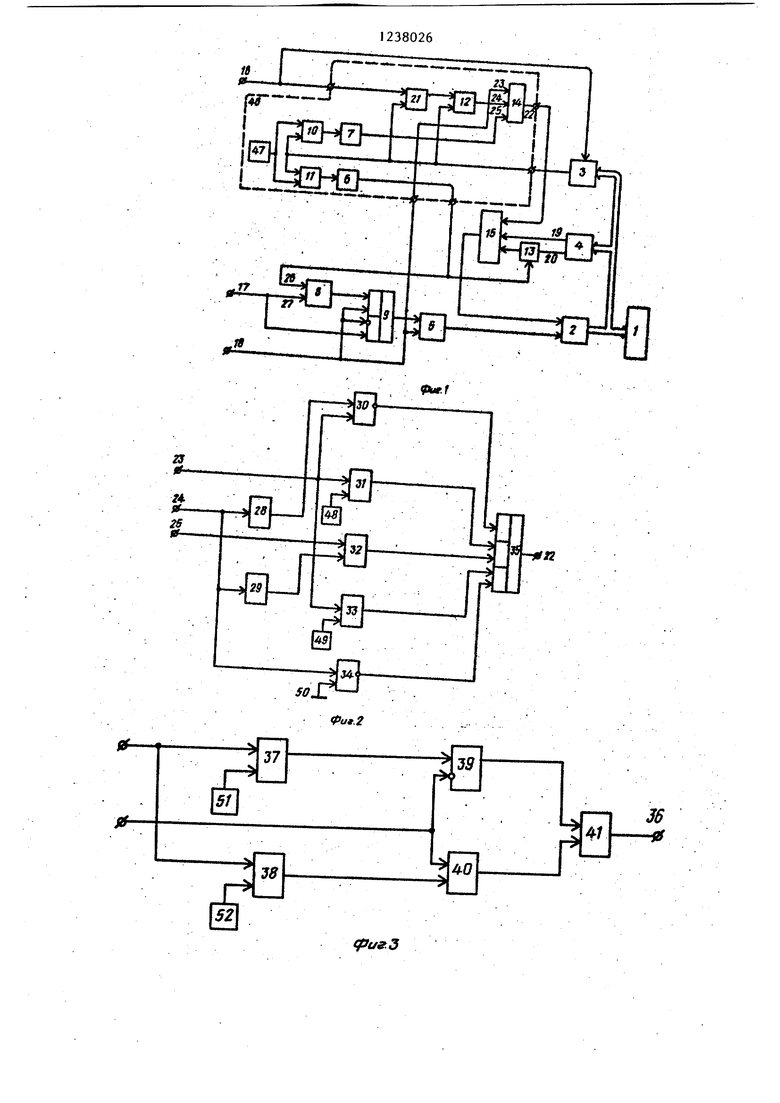
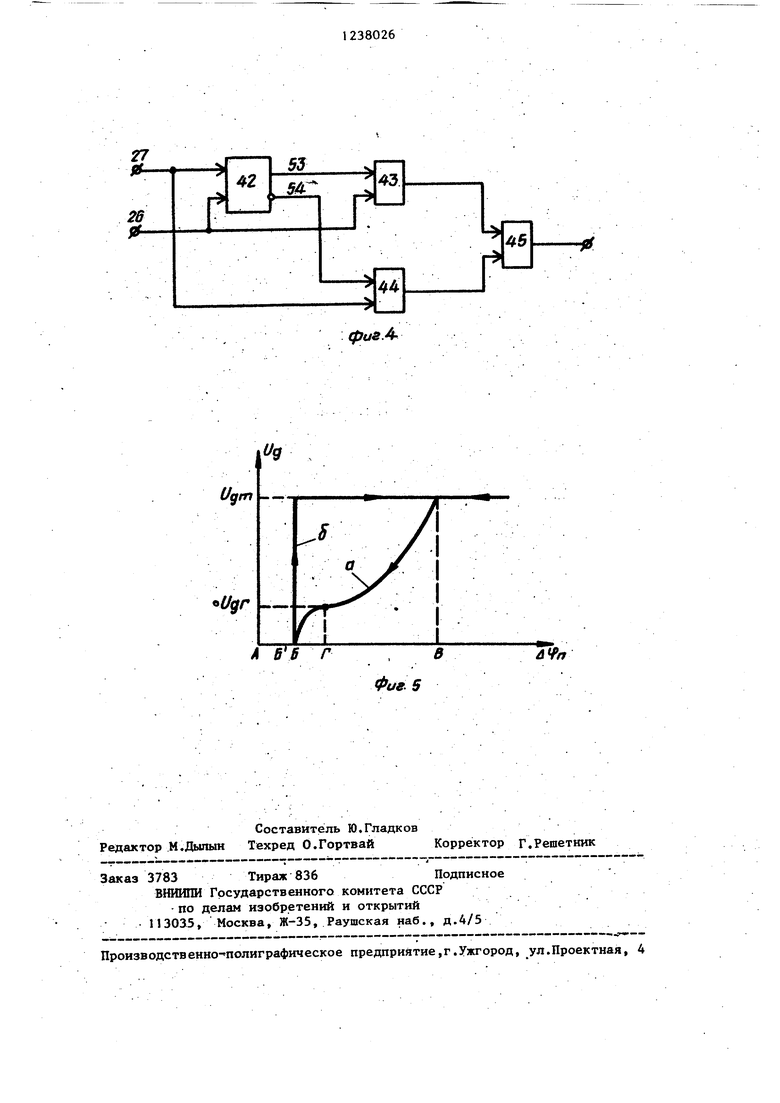
На фиг.1 представлена функциональная схема сйстемь на фиг.2. - функциональная схема одного из ва- {зиантов реализации логического блока ; на фиг.3 - функциональная схема блока сравнения; на фиг.4 - функциональная схема блока ограничения; на фиг.5 - зависимость между расстоянием телескопа до предельного его положения и максимально допусти-; Мой скоростью его движения.
Схема предлагаемой системы содержит телескоп 1 , привод 2. преобразо- ватель угол - код 3, блок 4 концевых выключателей., преобразователь код аналог 5, второй и первый постоянные запоминающие блоки 6 и 7, блок 8 ограничения, элемент 2И-2ИЛИ 9, первый, второй и третий сумматоры 10,11 и 12, блок 13 .сравнения, логический блок 14, элемент ИЛИ-15., первый, второй и третий входы системы 16,17 и 18, выходы 19 и 20 блока 4 концевых выключателей, регистр 21, выход 22, третий, второй и первьй входы 23,24 и 25 логического блока 14, первый и второй входы 26 и 27 блока 8 ограничения, сигнум-реле 28, детектор 29, элементы 30 - 34. срав нения, элемент И-ИЛИ 35, выход 36 блока сравнения 13, элементы 37.. и 38 сравнения, элементы И 39 и 40, элемент ИЛИ 41, элемент 42 сравнения, элементы И 43 и 44, элемент . ИЛИ 45, вычислительное устройство 46, источники 47,48 и 49 постоянного сигнала, оёщая шина 50, источники 51 и 52 постоянного сигнала, выходы 53 и 54 элемента сравнецкя . 42. На фиг.5 обозначены Vq - максимально допустимая скорость вращения телескопа 1, itp .-расстояние до предельно допустимого положения телескопа 1.
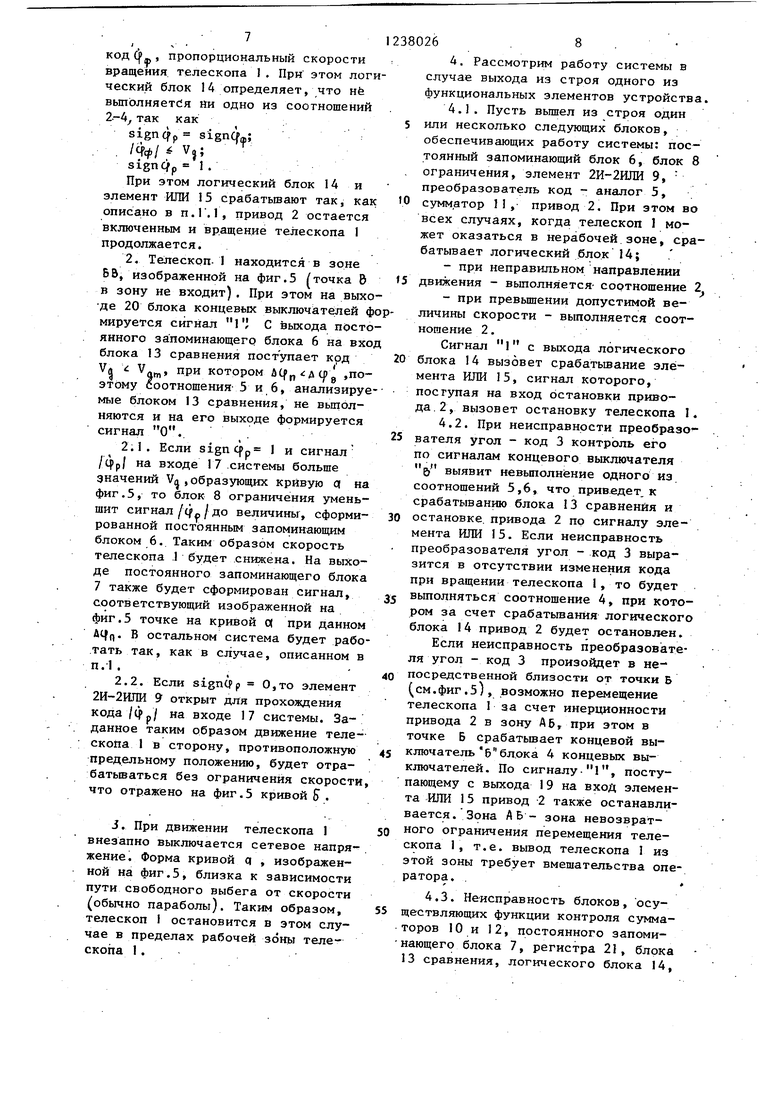
На фиг.5 показана зависимость между расстоянием телескопа I до предельного его положения и. максимально допустимой скоростью его движения для данной системы.
На участке Б В эта зависимость изображена кривыми d (случай, движения телескопа 1 в направлении предельного положения) и S (случай пppa
238026
-/ .
;
, .
a
тивоположного направления движения), Форма кривой а до точки Van (0,05,...,0,1) Va на участке Вt близка к зависимости пути свободно- - го выбега телескопа от скорости (обычно параболы), на участке БГ экспонента. Запретная зона телескопа (ДБ) у данной системы существенно. . меньше, чем у известных систем, и IQ определяется величиной пути торможения телескопа 1 в слзгч а е выключения напряжения сети при скорости телескопа 1 , не превьппающей приблизительно 5-10% от максимальной. j Большой диапазон рабочих углов сочетается с высокими скоростями в зоне, близкой к П1 едельному положен нию (участок БВ, фиг.5), а также . отсутствием возможности аварийной -и ситуации при вьрсоде из строя одного из функциональных блоков системы.
Зависимость, представленная на. фиг.5, реализуется в постоянных запоминающих блоках 6 и 7 путем 25 прошивки адресных шин. .
Блок 4 концевых выключателей содержит два концевых выключателя ( 5 ), срабатьшающих в поло-; жениях телескопа 1, соответствующих точкам 6 и В на фиг.5, при этом на выходах .19 и 20 блока 4 концевых выключателей формируется сигнал 1.
Вычислительно е устройство 46 со- щержит источник 47 постоянного сиг- ,.нала, сумматоры 10, 11, и постоянные запоминающие блоки 6 и 7, логический блок 14 и регистр 21 .
Логический блок 14 содержит сиг- нум-реле 28, детектор 29, элементы 30, 31,32 и 34 сравнения, элемент И-ИЛИ. В качестве детектора 29 применяется детектор с линейной характеристикой. .
Блок 13 сравнения содержит элементы 37 и 38 сравнения, элементы И 39,40, элемент ИЛИ 41-и источники 51 и 52 постоянного сигнала. На один вход подается величина Vg, пропор.- циональная ACf , на Другой - сиг- нал КБ. Величины ulp , йО являются константами и формируются внутри блока 13 сравнения в источниках 51 и 52 постоянного сигнала.
Блок 8 ограничения содержит эле- 55 мент 42 сравнения, элементы И 43 и 44 и элемент ИЛИ 45. Блок 8 ограничения пропускает без изменения код, поступающий на его вход 27, в том слу30
35
40
45
чае, если абсолютная величина этого кода меньше кода, поступающего на вход 26. Если абсолютная величина б ОЛЬ гае, ТО блок 8 ограничивает на своем выходе эту величину до значе- НИН, поступающего в данный момент на вход 26. Код, .поступаюв;ий на вход 27 обозначен через X, на вход 26 - через Y. На выходе 46 элемента 42 сравнения формируется сигнал 1, если Хл, на выходе 47 - если Функциональная схема изображена для случая, когда коды X и Y одноразрядные , в случае многоразрядного код количество элементов И 43 и 44 должн быть увеличен пропорционально ко- личеству разрядов кода.
Система содержит телескоп 1, например, на азимутальной монтировке: на оси Z .(зенитное расстояние) установлен привод 2, кинематически связанный с преобразователем угол - код 3 и блоком 4 концевых выключателей.
Система работает следующим об- разом.
На вход 17 системы поступает представленное последовательным кодом расчетное значение абсолютной величины скорости движения -телеско- па i (по оси Z).
На вход 18 системы поступает информация о знаке величины С.- signtfp. Если знак соответствует движению в направлении предельного положения телескопа 1, то signcfp™ 1, если в противоположном направлении, то sign(fp О, а когда (р О в течение промежутка времени , то на Jзxoд 18 системы поступает сигнал sign ( 2. Преобразователь угол - код 3 опрашивается тактовыми импульсами поступающими на вход 16 системы, и формируется код, пропорциональный фактическому положению (у теле- скопа 1.
Сзгмматоры 10 и 11 рассчитьшают текущее расстояние телескопа I до предельного положения:
,-(в ,
где ( - сигнал, поступающий с выхода источника 47 постоянного сигнал а, равный -ito величине коду преобразователя угол - код 3, соответствующему предельному положению теле- скопа 1 (точке А фиг.5).
Постоянные запоминающие блоки 6 и 7 реализуют функциональную зависи
мость, представленную на фиг.5,между величиной UCf поступающей в виде кода на их входы, и выходной величиной Vn, определяющей максимально допустимую скорость телескопа 1, которая формируется кодом, заложенным (зашитым) в постоянных запоминающих блоках 6 и 7. Эта функциональная зависимость может быть описана следующим выражением: если uq)uCf0 , то Vg (1)
)g ,то V К ()j
если
если ucpgSacpjjtflCff. ,то
Vqr (1 Е ()
).
где К, а - константы; uqi,acfe , - значения uCf, изображенные на фиг.5 соответственно буквами Б, В , Г .
Регистр 21 .задерживает на один такт опроса код преобразователя i угол - код 3. Поэтому сумматор 12, рассчитывая разность кодов текуще- ;го и предыдущего опросов преобразователя угол - код 3, определяет в соответствующем масштабе фактическую скорость движения ф ар телескопа 1 . На входы 23, 24, и 25 логического блока 14 поступают сигналы SignCf-, Cfm Va . Логический блок 14 аналрг- зирует следующие соотношения:
signcfp 1 Sign(f(p; (2)
sign q-p 1, /cf(,/ Va; (3) .
sign Cfp 2, (. 0, (4) где sign qiq, - знак величиныс.
Если выполняется хотя бы одно из этих соотношений, йа выходе логического блока 14 формируется сигнал 1. Блок I3 сравнения анализирует следующее соотношение:
KB .0; (5)
Лср„ , KB - 1,
б)
где ucpg. - минимальное значение UCff, , при котором срабатывает концевой вьпс,шочатель Б в блоке 4 концевых выключателей;
ucf g - максимальное значение Afn, при котором срабатывает концевой выключатель. Б в блоке 4 концевых выключателей.
означает, что концевой выклю чатель В сработал, при зтом на выходе 20 блока 4 концевых выклю
5 1
чателей формируется сигнал l. означает, что концевой выключатель Б не сработал, при этом на выходе 20. блока 4 концевых выключателей формируется сигнал О.
.Рассмотрим различные варианты работы системы.
1, Телескоп 1 находится далеко от предельного положения, т.е. фактическое расстояние телескопа 1 до предельного положения больгае или равно значению efn в точке В -(фиг.з) При этом, как следует из фиг.5, Vg Vn , где Vam максимальная скорость привода 2.
Тактовые импульсы, поступающие на вход 16 системы, опрашивают преобразователь угол - код 3, ца вькоде которого с частотой тактовых импульсов формируется код, пропорциональный положению телескопа 1. Этот код поступает на регистр 21, который при поступлении тактовых импульсов на другой его вход задерживает на один такт код преобразователя угол - код 3, поступающий с его выхода на вход сумматора 12. Таким образом, сумматор I2,рассчитьгоая разность кодов текущего и предьщущего опросов пре- образо.вателя угол - код 3, определяет в соответствующем маспттабе фак тическую скорость движения cpqj те
лескопа 1, формируемую на выходе сумматора 12 в виде двоичного кода, знаковьй разряд которого фиксирует направление вращения телескопа |.
Код преобразователя угол - код 3 поступает на входы сумматоров 10 и 11, на выходе которых формируется в соответствии с формулой (1) зна- чение (ff, , которое, поступая на входы постоянных запоминающих блоков 6 и 7, формирует на их выходах код, соответствующий величине Vg (фиг.5)
Поступающий на вход 17.системы код, пропорциональный /tfp/, проходит без ограничения величины на выход блока 8 ограничения.
1.1. Пусть телескоп I неподвижен и на вход 17 системы подается сигнал Cfp О, в этом случае на системы присутствует сигнал signcfp 2 на входы логического блока 14 поступают сигналы: с выхода сумматора 12 -Cfa, О, так как те.пескоп I неподвижен; с выхода блока 7 - с выхода 18 системы - signtfp 2.
Так как ни одно из соотнощений 2-4 не выполняется, на выходе логического блока 14 формируется сигнал О.
Телескоп 1 находится далеко от предельного положения, поэтому на выходах 19 и 20 блока 4 коицевых выключателей формируется сигнал О.
На вход блока 13 сравнения посту пает с выхода блока 6 сигнал У , при котором .A(f 6 0 . При этом соотношения 5 и 6, анализируемые блоком 13 сравнения, не выполняются. Так как и на выходе 20 формируется сигнал О, на выходе 36 блока I3 сравнения формируется сигналО
О. При поступлении сигналов с выходов блока 4 концевых вы
ключателей, блока 13 сравнения и логического блока 14 на входы элемента ИЛИ 15 на его выходе формируется сигнал О, при котором привод 2 находится во включенном состоянии. . На вход элемента 2И-2ИЛИ 9 тупает сигнал signcp- 2, при котором элемент закрыт для прохождения кода, т.е. на его выходе формируется код О, который преобразуется далее
преобразователем код - аналог 5 в нулевое н.,апряжение, и привод 2 таким образом продолжает оставаться неподвижным.- - . .
1.2. Пусть система находится в состоянии, описанном в п.1.1, после чего в момент времени, соответствующий поступлению на вход 16 Системы i-ro тактового импульса, на вход 17 системы поступает сигнал /Cf р /т( О, а на вход 18 - s gnCfp Г.
.Код, пропорциональный /4р/ проходит без изменения йа выход блока 8 ограничения и элемента 2И-2ШШ 9, открытого сигналом sign 1 на входе 18 системы.
Преобразователь код-аналог 5 формирует на,своем выходе сигнал, пропорциональный коду, поступающему с выхода элемента 2И-2ШШ 9, знак ; которого сЬотвётствует сигналу На входе 18 системы. Этот сигнал поступает на включенный привод 2, кото- рьй вращает телескоп 1 со скоростью пропорциональной поданному на при- . вод 2 сигналу.
По (i+l)-My тактовому импульсу преобразователь угол - код 3. измеряет новое положение телескопа 1, и на выходе сумматора I2 формируется
код (ji-j, пропорциональный скорости вращения телескопа 1 . При этом логический блок 14 определяет, что не вьшолняетСя ни одно из соотношений 2--4 так как
signcfp signCfa,;
. Vj;
signc/p 1 .
При этом логический блок 14 и элемент ИЛИ 15 срабатьшают так, как описа1но в п.Г. 1, привод 2 остается включенным и вращение телескопа I продолжается.
2,Телескоп- 1 находится в зоне
БВ, изображенной на фиг.5 /точка В в зону не входит) . При этом на вьпсо -де 20 блока концевых выключателей фмируется сигнал I J С выхода постоянного запоминающего блока 6 на вхо блока 13 сравнения поступает код Vfl V , при котором uCfn«:A(|)p .поэтому соотношения 5 и 6, анализируемые блоком 13 сравнения, не вьщол- няются и на его выходе формируется сигнал О. .
2.1.Если signcfp 1 и сигнал /qip/ на входе 17 .системы больше значений V,образующих кривую q на фиг.5, то блок 8 ограничения уменьшит сигнал /(/„ / до величины, сформи- рованной постоянным запоминающим блоком 6. Таким образом скорость телескопа .1 будет .снижена. На выходе постоянного запоминающего блока
7 также будет сформирован сигнал, соответствующий изображенной на фиг.5 точке на кривой о( при данном ДЦр. В остальном система будет работать так, как в случае, описанном в п. 1 .
2.2.Если signU p О,то элемент 2И-2ИЛИ 9 открыт для прохождения кода /срр/ на входе 17 системы. Заданное таким образом движение телескопа 1 в сторону, противоположную предельному положению, будет отра- батьгоаться без ограничения скорости что отражено на фиг.5 кривой S .
3,При движении телескопа 1 внезапно выключается сетевое напряжение. Форма кривой q , изображенной на фиг.5, близка к зависимости пути свободного выбега от скорости (обычно параболы). Таким образом, телескоп I остановится в этом случае в пределах рабочей зонь телескопа 1 .
4. Рассмотрим работу системы в случае выхода из строя одного из функциональных элементов устройства
4.1.Пусть вьшел из строя один или несколько следующих блоков, обеспечивающих работу системы: постоянный запоминающий блок 6, блок 8 ограничения, элемент 2И-2ИЛИ 9, преобразователь код - ангшог 5, сумматор II,- привод 2. При этом во всех случаях, когда телескоп 1 может оказаться в нерабочей зоне, срабатывает логический блок 14;
-при неправильном направлении движения - вьшолняется- соотношение
-при превьштении допустимой величины скорости - выполняется соотношение 2.
Сигнал 1 с выхода логического блока 14 вызовет срабатывание элемента ИЛИ 15, сигнал которого, поступая на вход остановки привода. 2, вызовет остановку телескопа I
4.2.При неисправности преобразо вателя угол - код 3 контроль его
по сигналам концевого выключателя & выявит невьптолнение одного из соотношений 5,6, что приведет, к срабатыванию блока I3 сравнения и остановке, привода 2 по сигналу элемента ШШ 15. Если неисправность преобразователя угол - код 3 выразится в отсутствии изменения кода при вращении телескопа 1, то будет вьтолняться соотношение 4, при котором за счет срабатьшания логическог блока 14 привод 2 будет остановлен. Если неисправность преобразователя угол - код 3 произойдет в непосредственной близости от точки Б (см.фиг.5), возможно перемещение телескопа I за счет инерционности привода 2 в зону А Б, при этом в точке Б срабатьшает концевой выключатель б блока 4 концевых выключателей. По сигналу- 1, поступающему с выхода 19 на вход элемента ИЛИ 15 привод -2 также останавливается. Зона АБ- зона невозвратного ограничения перемещения телескопа 1, т.е. вывод телескопа I из этой зоны требует вмешательства оператора. .
4.3.Неисправность блоков, осуществляющих функции контроля сумматоров 10 и 12, постоянного запоминающего блока 7, регистра 21, блока 13 сравнения, логического блока 14,
91
элемента ИЛИ 15, блока 4 концевых выключателей, не может вызвать аварийной ситуации, так как в этом случае управление телескопом 1 будет происходить или правильно, или телескоп 1 остановится.
По сравнению с системами управления наиболее совершенных телескопов (например, телескопом БТА с диаметром зеркала 6 м) применение данной системы позволит увеличить зону рабочих углов телескопа 1 и скорость наведения телескопа в зонах, близких к зениту и горизонту, что по- вьппает быстродействие системы
Формула изобретен и. я
1.Система управления телескопом, имеющая три электрических входа и со держащая элемент ИЛИ и последовательно соединенные элемент 2И-2ИЛИ, преобразователь код - аналог и привод, вал которого кинематически связан с валами телескопа, блока кон цевых выкхпочателей и преобразователя угол - код, подключенного выходом к первому входу вычислительного устройства, соединенного первым выходом с первым входом блока сравнения, о т л и ч а ю щ а я с я тем, что, с целью расширения зоны рабочих углов системы, в ней дополнительно установлен блок ограничения, подключенный первым входом к первому выходу вычислительного устройства, вторым входом - к второму электрическому входу системы и к первому входу элемента 2И-2ИЛИ, а выходом - к второму входу элемента 2И-2ИЛИ, .третий и четвертьй входы которого соединены между собой и подключены к
3802610
третьему электрическому входу системы, к второму входу преобразователя код - аналог и к второму входу вьиислительного устройства, соеди- 5 ненного третьим входом с первым электрическим входом системы и с электрическим входом преобразователя угол - код, а вторым выходом - с первым входом элемента ИЛИ, подклюto ченного выходом к второму входу привода, вторым входом - к первому выходу блока концевых выключателей, а третьим входом - к выходу блока сравнения, соединенного вторым вхоt5 дом с вторым выходом блока концевых выключателей. .
2. Система по п.1, отличаю- щ .а я с я тем, что вычислительное устройство содержит последовательно 20 соединенные источник постоянного сигнала, первый сумматор, первый постоянный запоминающий блок и логический блок, последовательно соединенные второй сумматор и второй 25 постоянный запоминающий блок и
последовательно соединенные регистр и третий сумматор, подключенный выходом к второму входу логического блока, выход источника постоянного
3Q сигнала соединен с вторым входом .второго сумматора, второй вход которого соединен с вторыми входами первого сумматора, регистра и третьего сумматора и является первым входом вычислительного устройства, - третий вход логического блока, первый вход регистра, выход второго постоянного запоминающего блока и выход логического блока являются соответственно вторым и третьим вхо35
40
дами и первым и вторым -выходами вычислительного устройства.
id
2У
fttef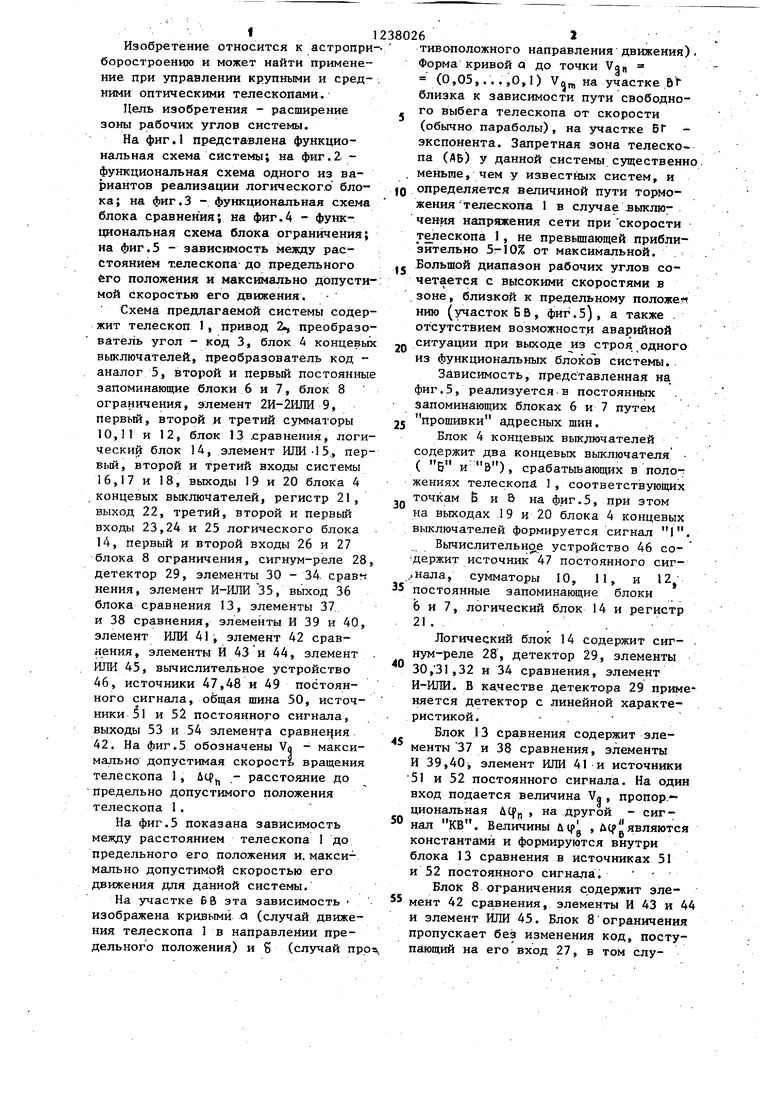
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Устройство для управления оптическим телескопом | 1980 |
|
SU941942A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Устройство для функционального контроля электропривода | 1987 |
|
SU1481717A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Устройство для управления электроприводом | 1977 |
|
SU739468A1 |
| Система управления телескопом | 1986 |
|
SU1390600A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
Изобретение относится к области астроприборостроения и может найти применение при управлении крупными f средними оптическими телескопами. Целью изобретения является расширение зоны рабочих углов.телескопа. Поставленная цель достигается за счет того, что в направлении предельного положения телескоп движется со скоростью, величина которой уменьшается от максимально допустимой до нуля, по сложной .гиперпараболической зависимости величины отклонения текущего положения телескопами его предельного положения, а в противоположном направлении телескоп движется с максимально допустимой ско- ррстью. Система реализована на цифровых элементах. На входы системы поступают тактовый сигнал, расчетное значение абсолютной величины максимально допустимой скорости движения телескопа, представленное последовательным кодом, и информации о знаке угловой скорости телескопа. Зависимость скорости движения телескопа от направления движения и от величины отклонения от предельно допустимого положения рассчитьшает- ся заранее и заносится в память двух постоянных запоминающих устройств, которые опрашиваются .в процессе работы системы. Два запоминающих устройства применяются для повышения надежности устройства. 1з.п. ф-лы, . 5 ил. (Л ьо 00 00 о ND О
37
ftУ8
39
36
40
ffu9.S
фие.4А В 6 Г
Фиг. S
| Система управления телескопом | 1978 |
|
SU805251A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР | |||
| Устройство для полуавтоматической коррекции положения телескопа | 1974 |
|
SU601668A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР ,№560213, хл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
