Изо бретение относится к машиностроению, а именно к автоматизации производственных процессов. .
Известен манипулятор, содержащий основание г платформу с механической рукой. Механизмы поворота и выдвижения руки и механизм подъема, состоящий из двух пар звеньев, установленных параллельно и соединенных шарнирно с платформой и основанием II.
Неддостаткрм известного манипулятора является малый ход руки по вертикали , что сужаешь его технологические возможности.
Цель изобретения - расширение технологических воэкюжностей манипулятора за счет увеличения величины вертиксшьного хода механической руки.
Это достигается тем, что одна из пар паргишельных звеньев механизма подъема выполнена таким образом, что каждое звено этой пары состоит из двух шарнирно связанных частей, одна из которых снабжена дополнитель.ным приводом.
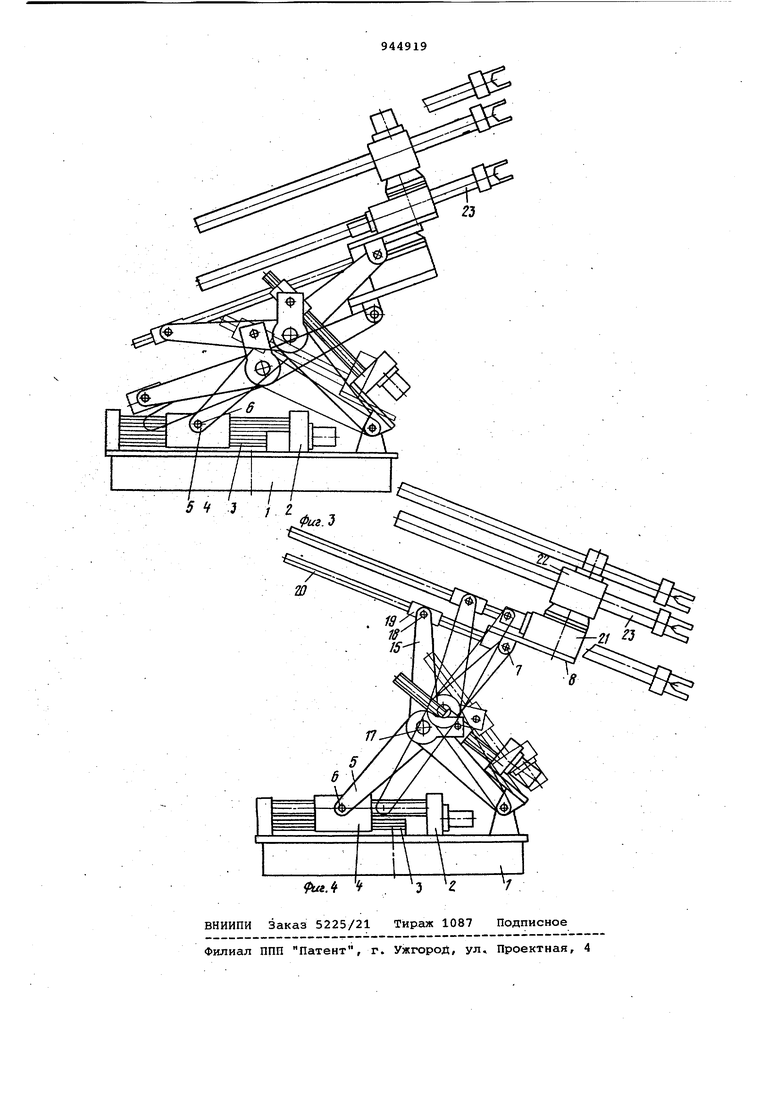
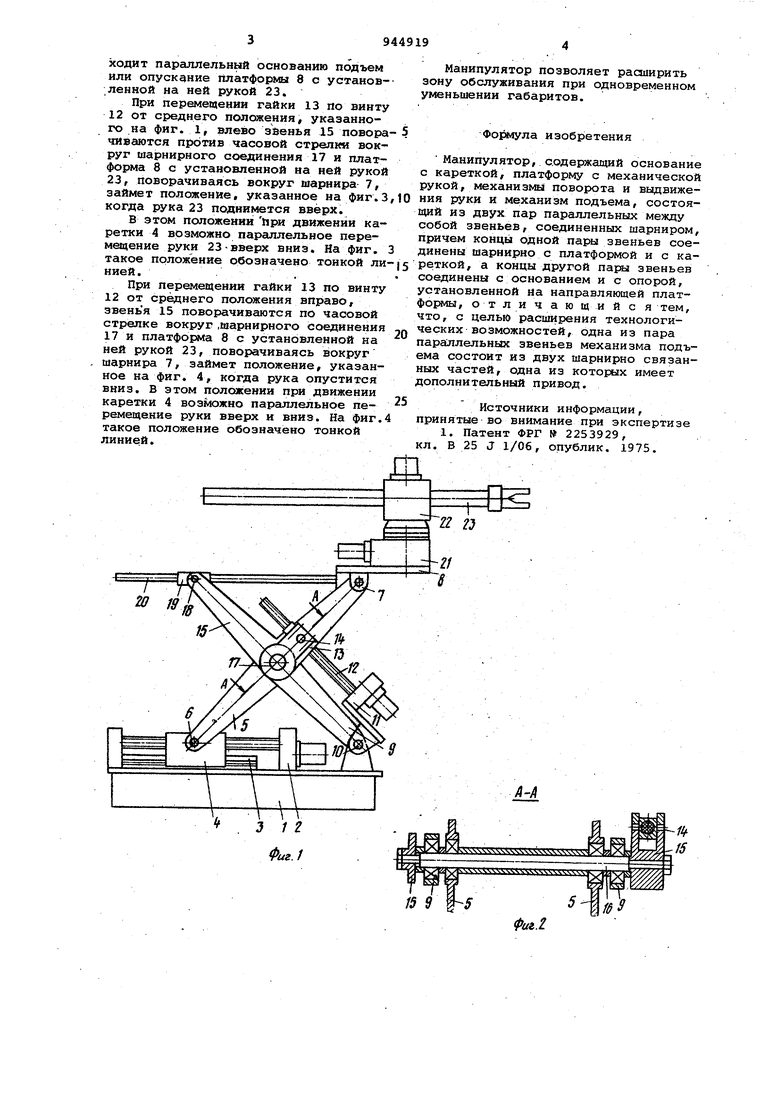
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - манипулятор с повернутой вверх рукой; на фиг. 4 то же, с опущенной вниз рукой.
Манипулятор состоит из поворотного основания 1 и установленных на нем П{Я1вода 2 механизма 3 подъема направляющих, каретки 4, двух параллельно установленных звеньев 5, соединенных шарнирами 6 с кареткой 4 и шарнирами 7 с платформой 8 руки, звеньев 9, соединенных шарниром 10 с основанием 1 и приводом 11, который имеет ходовой винт 12 и гайку 13, соединенную шарниром 14 с звеном 15, установленным на оси 16 шарнирного соединения 17, связывающего все одноименные параплельнью звенья вид А (фиг.2).
Звенья 15 связаны шарниром 18с опорой 19, установленной на направлянхаей 20, закрепленной на платформе В, на которой также установлены механизм 21 поворота руки, механизм 22 выдвижения руки и рука 23.
Манипулятор работает следующим образом.
ЕСЛИ звенья 15 и звенья 9 находятся в положении, указанном на 25 фиг. 1, когда они имеют единую продольную ось и когда оси, соединяющие шарниры 7 И 18, а также оси, соединякицие шарниры 6 и 10, параллельны, то в этом случае при движении каретки 4 от привода 2 вправо или влево происходит параллельный основанию подъем или опускание платформы 8 с уставовленной на ней рукой 23. При перемещении гайки 13 по винту 12 от среднего положения, указанного на фиг. 1, влево звенья 15 повора чиваются против часовой стрелки вокруг шарнирного соединения 17 и платФорма 8 с установленной на ней рукой 23, поворачиваясь вокруг шарнира 7, займет положение, указанное на фиг.3 когда рука 23 поднимется вверх. В этом положении При движении каретки 4 возможно параллельное перемещение руки 23-вверх вниз. На фиг. такое положение обозначено тонкой ли нией. . . При перемещении гайки 13 по винту 12 от среднего положения вправо/ звенья 15 поворачиваются по часовой стрелке вокруг .шарнирного соединения 17 и платформа 8 с установленной на ней рукой 23, поворачиваясь вокруг шарнира 7, займет положение, указанное на фиг. 4, когда рука опустится вниз. В этом положении при движении каретки 4 возможно параллельное перемещение руки вверх и вниз. На фиг. такое положение обозначено тонкой линией. Манипулятор позволяет расширить зону обслуживания при одновременном уменьшении габаритов. Формула изобретения Манипулятор, содержащий основание с кареткой/ платформу с механической рукой/ механизмы поворота и выдвижения руки и механизм подъема, состоящий из двух пар параллельных между собой звеньев/ соединенных шарниром, причем концы одной пары звеньев соединены шарнирно с платформой и с кареткой, а концы другой пары звеньев соединены с основанием и с опорой, установленной на направляющей платФормы, отлич ающи и с я тем, что, с целью расширения технологических возможностей, одна из пара параллельных звеньев механизма подъема состоит из двух шарнирно связанных частей/ одна из которых имеет дополнительный привод. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ 2253929, кл. В 25 J 1/06, опублик. 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1093540A1 |
| Манипулятор | 1980 |
|
SU984856A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1985 |
|
SU1301529A2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1971 |
|
SU372885A1 |
| Манипулятор для перегрузки крупно-гАбАРиТНыХ зАгОТОВОК | 1979 |
|
SU846268A1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2691169C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2705824C1 |
| Манипулятор модульного типа | 1983 |
|
SU1263521A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |