Изобретение относится к роботостроению, в частности к конструкциям манипуляторов. .
Известен манипулятор, содержащий основание, установленные на нем привод линейного перемещения, связанный с ним уравновеишваихций элемент и шарнирно-рычажный механизм для подъема закрепленной на нем платформы с руг кой, включаквдий две соединенные одной осью Ьары звеньев, верхние концы которых шарнирно соединены Соответственно с платформой и ее направляющей, а нижние конщл - соответственно с основанием и с установленной на ее продольных направляющих кареткой 1 .
Недостатком известного манипулятора .является то, что вследствие изменяйщегося передаточного отношения, присущего кинематике механизма подъема манипулятора, в приводе в процессе подъема и опускания и особенно в режиме разгона и торможения возникают динамические нагрузки, что ухудшает динамику манипулятора, понижает его долговечность.
Цель изобретения - улучшение динамических характеристик манипулятора.
Указанная цель достигается тем, что манипулятор снабжен расположенным между кареткой и основанием допопнительншд шарнирно-рычс1жтл4 механизмом имеющим установленную на каретке направляюБХую, установленную на основании подвижную опору и два соединенные одной осью звена, одни концы которых шарнирно соединены соответtoственно с кареткой и ее направляющей, а другие концы шарнирно соединены соответственно с основанием и подвижной опорой, связанной с приводом линейного перемещения, причем нап15равляющие дополнительного и основного шарнирно-рычажных механизмов размещены перпендикулярно одна к другой.
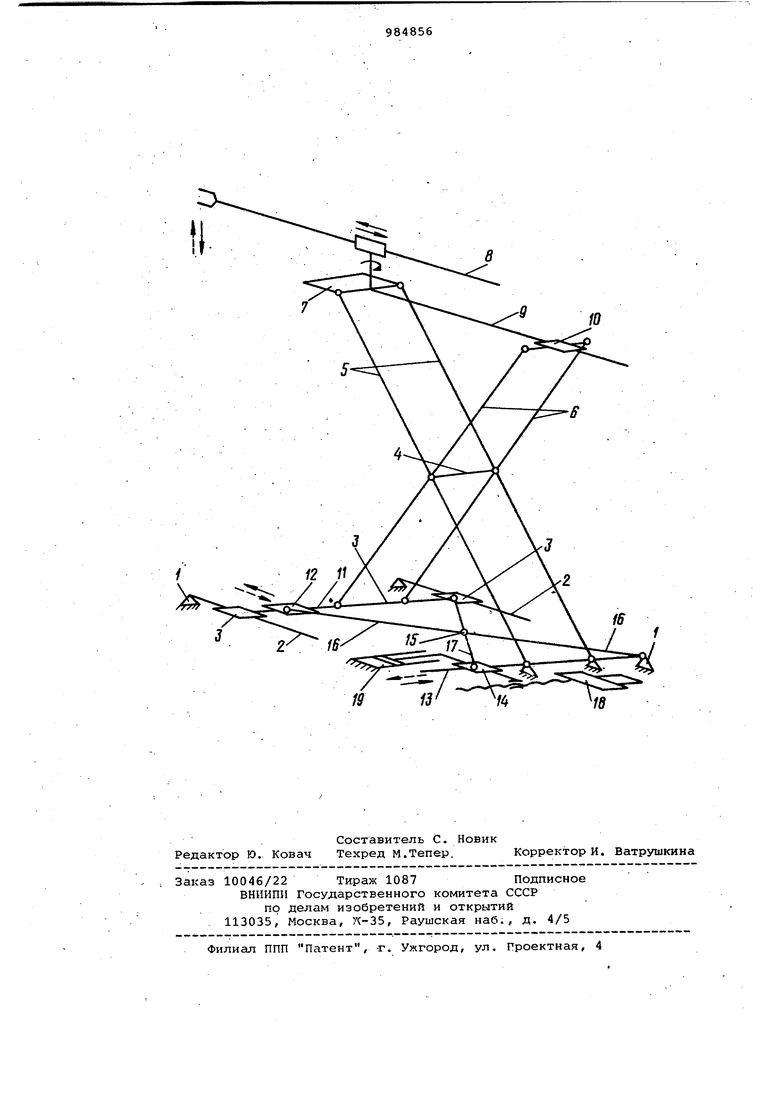
На чертеже изображена кинемат.ическая схема манипулятора.
20
Манипулятор состоит из основания 1 на котором установлены продольные направляющие 2, на которых размещена каретка 3, к основанию 1 и карет-. ке 3 шарнирно присоединен вертикаль25ный шарнирно-рычажный механизм, состоящий из двух соединенных одной осью 4 пар звеньев 5 и 6.
Звенья 5 шарнирно соединены свои ми верхними концами с платформой 7,
30 на которой установлена рука 8. На
платформе 7 размещена направляющч1Я 9 с шарниром 10, с которым соединены верхние концы звеньев 6.
Дополнительный шарнирно-рычажный механизм размещен между основанием 1 и кареткой 3 и состоит из направляющей 11 с шарниром 12, подвижной по направляющей 13 опоры 14, установленной на основании 1, и двух соединенных одной осью 15 звеньев 16 и 17. Звено 16 связано с основанием 1 и шарниром 12, звено 17 связано с кареткой 3 и опорой 14. Направляющие 11 и 13 размещены перпендикулярно направляющим 2. Привод 18 линейного перемещения связан с опорой 14 и управновешивающим элементом в виде пневмоцилиндра 19, установленными на основании 1.
Манипулятор работает следующим образом.
При движении опоры 14 вправо по направлению, обозначенному сплошной стрелкой, звенья 16 и 17 дополнительного шарнирно-рычаясного механизма перемещают каретку 3 с направляющей 11 по стрелке, обозначенной сплошной линией. При этом звенья 5 и 6 основного шарнирно-рычажного механизма Перемещают руку В вниз по вертикали. Когда привод перемещает.опору 14 по Направляющей 13 в направлении, указанном штриховой стрелкой, при этом рука 8 поднимается вверх. Пневмоцилиндр 19 уравновешивает вес переме1ца1ощихся вертикально платформы 7 и УЗЛОВ руки 8 манипулятора. Выбор мощ ности привода 18 производят по массе поднимаемого груза с учетом уравновешенных инерционных сил.
В предлагаемом манипуляторе обеспечивается постоянное передаточное отношение от перемещаемой массы к приводу, поэтому на приводном звене
в любом положении механизма приложена одна и та же сила, пропорциональная массе поднимаемых механизмов, что позволяет при разгоне и торможении их получить лучшие динамические характеристики и повысить долговечность манипулятора. Формула изобретения
Манипулятор, содержащий основание установленные на нем привод линейного перемещения, связанный с ним уравновешивгиощий элемент и основной шарнирно-рычажный механизм для подъема закрепленной на нем платформы с рукой J. включающий две соединенные одной осью пары звеньев, верхние концы которых шарнирно соединены соответственно с платформой и ее направля1яцей, а нижние концы шарнирно соеднены соответственно с основанием и с установленной на его продольных направляющих кареткой, отличающийся тем, что, с целью улучшения динсшических характеристик, он снабжен расположенныгл между кареткой и основсшием дополнительным шарнирно-рычакным механизмом, имеющим установленную на кареткенаправляющую, установленную на основании подвижную опору и два соединенные одной осью звена, одни концы которых шарнирно соединены соответственно с кареткой и ее направляющей, а другие концы шарнирно соединены соответственно с основанием и подвижной опорой, связанной с приводом линейного перемещения , причем .направляющие дополнительного и основного шарнирно-рычахсных механизмов размещены перпендикулярно одна к другой.
Источники информации, принятые во внимание при экспертизе
2. Заявка ФРГ I 2253929, кл. В 25 J 1/06, опублик. 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU944919A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ МЕХАНОТЕРАПИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2802462C1 |
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО ТРАМВАЯ | 2005 |
|
RU2297340C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2401795C1 |