(Л
JT
4
Э
СО
) 00
Изобретение относится к робототехнике, а именно к конструкции исполнительных органов роботов-манипуляторов, и может быть использовано для захвата деталей, имеющих малую жесткость.
Цель изобретения - расширение технологических возможностей за счет обеспечения захвата токопроводящих и нетокопрово- дящих деталей изнутри.
На чертеже показан схват, общий вид.
Схват содерл ит электрод I, выполненный из электропроводного материала, покрытого диэлектриком, и электрод 2, выполненный в виде набора изогнутых пластин, расположенных вокруг электрода 1. Электроды 1 и 2 установлены в корпусе 3 и подключены к источнику питания (не показан). Захватываемая деталь обозначена позицией 4. Пластины электродов 2 выполнены с возможностью прогибания без остаточной деформации под действием сил электростатического воздействия, например, из пермалоя.
Схват работает следующим образом.
Электроды i и 2 подключают к источнику питания и между ними возникают электростатические силы притяжения, под действием которых электроды сближаются. С помощью механизма привода (не показан) схват вводится во внутреннюю полость захватываемой детали 4. С электродов снимают питание, пластины 2 расходятся, стремясь к первоначальному положению, и захватывают деталь.
Степень прижатия пластин 2 к поверхности захватываемой детали 4 может регули- роваться напряжением питания. Для сброса детали производится подключение электродов к источнику питания.
Формула изобретения
Схват промыщленного робота, содержащий корпус и два установленных в нем электрода, соединенных с источником питания, отличающийся тем, что, с целью расширения технологических возможностей, первый электрод выполнен в виде стержня, а второй электрод - в виде набора изогнутых пластин, расположенных вокруг первого электрода, выпуклостью вовне.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1505776A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1798182A1 |
| Схват манипулятора | 1986 |
|
SU1380938A1 |
| Схват манипулятора | 1984 |
|
SU1301698A1 |
| Схват | 1984 |
|
SU1301693A1 |
| Схват манипулятора | 1980 |
|
SU944921A1 |
| Привод исполнительного органа манипулятора | 1988 |
|
SU1548041A1 |
| Схват манипулятора | 1985 |
|
SU1283095A1 |
| ПРОМЫШЛЕННЫЙ МОДУЛЬ | 2003 |
|
RU2248267C1 |
| Электромагнитный самоустанавливающийся схват | 1990 |
|
SU1805033A1 |
Изобретение относится к робототехнике, а именно к конструкции исполнительных органов роботов и манипуляторов, и может быть использовано для захвата деталей, имеющих малую жесткость. Цель изобретения - расширение технологических возможностей за счет обеспечения захвата токопроводящих и нетокопроводящих деталей изнутри. Для этого первый электрод 1 выполнен в виде стержня, а второй электрод - в виде изогнутых пластин 2, расположенных вокруг электрода 1. Электроды покрыты диэлектрическим материалом. При подаче питания электроды сближаются за счет возникновения электростатических сил притяжения. Схват вводится во внутреннюю полость захватываемой детали 4. С электродов снимают питание, пластины 2 расходятся и занимают первоначальное положение, осуществляя захват детали. I ил.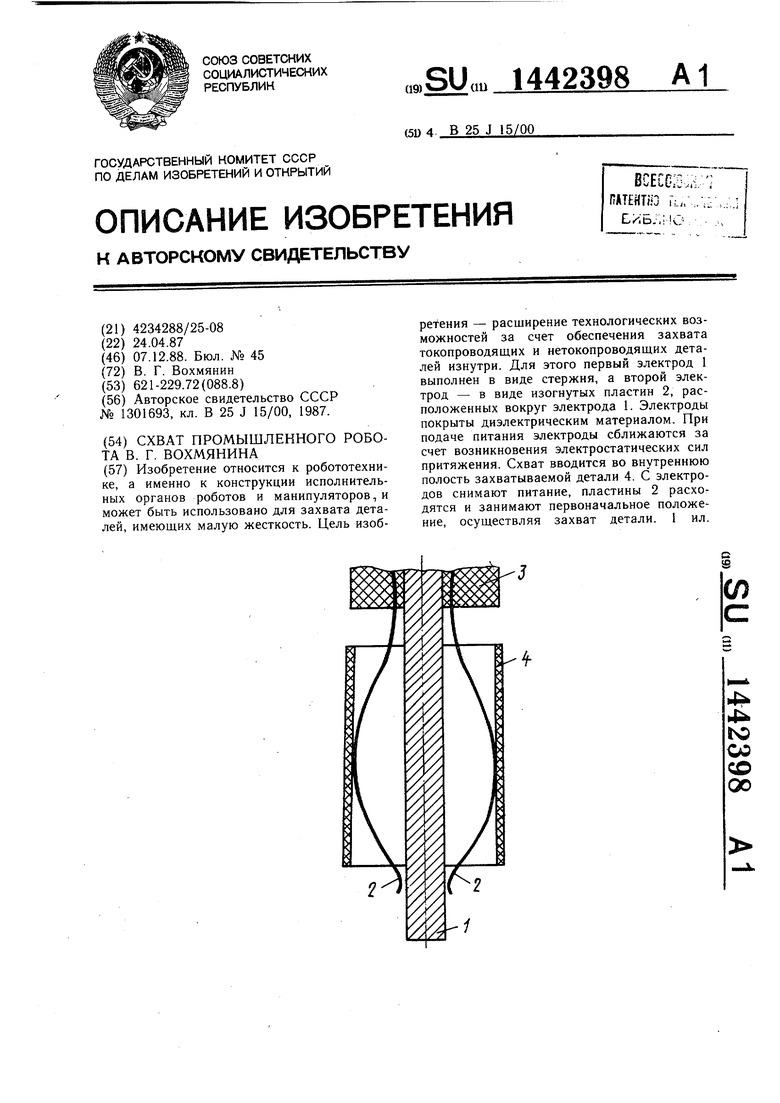
| Схват | 1984 |
|
SU1301693A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
