S
(Л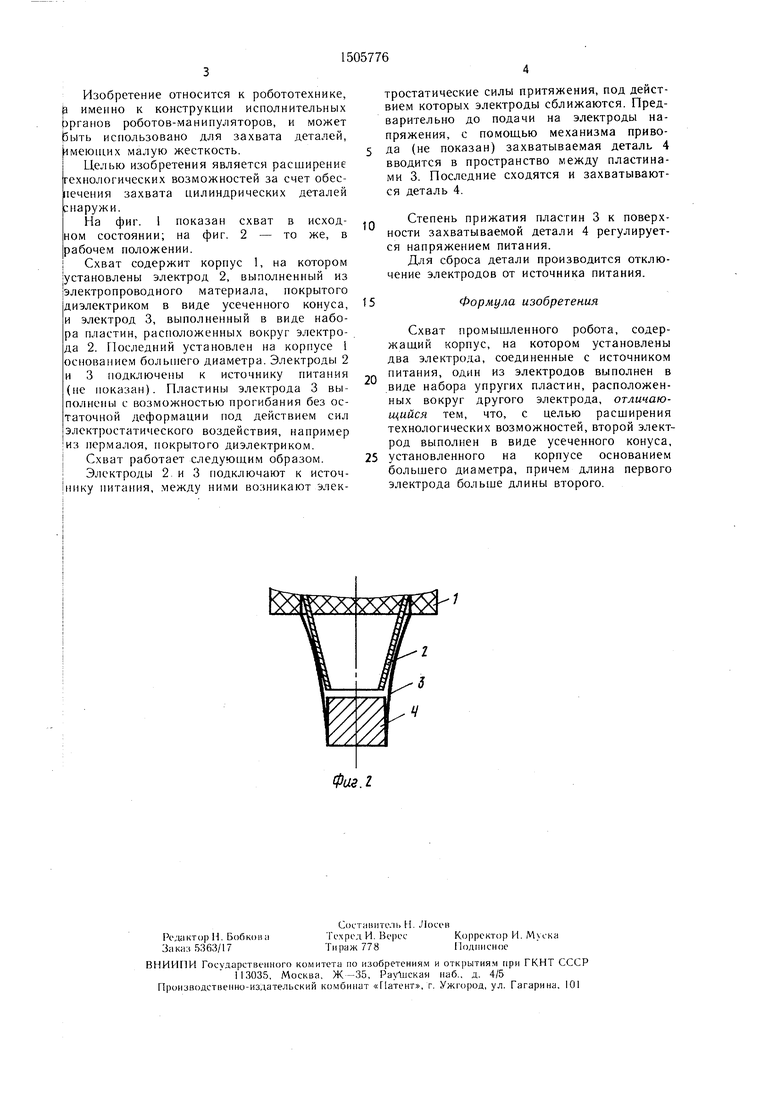
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1442398A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1798182A1 |
| Электромагнитный самоустанавливающийся схват | 1990 |
|
SU1805033A1 |
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Схват манипулятора | 1985 |
|
SU1321583A1 |
| Схват манипулятора | 1986 |
|
SU1380938A1 |
| Схват | 1984 |
|
SU1301693A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1761462A1 |
| Схват В.Г.Вохмянина для промышленного робота | 1986 |
|
SU1313702A1 |
Изобретение относится к робототехнике, а именно к конструкциям исполнительных органов роботов - манипуляторов, и может быть использовано для захвата деталей, имеющих малую жесткость. Цель изобретения - расширение технологических возможностей за счет обеспечения захвата деталей снаружи. Схват содержит корпус 1, на котором установлены два электрода, подключенных к источнику питания. При этом электрод 3 выполнен в виде набора упругих пластин, расположенных вокруг электрода 2, выполненного в виде усеченного конуса. Деталь 4 вводится в пространство между пластинами. При подключении электродов к источнику питания между ними возникают электростатические силы притяжения. Электроды сближаются и захватывают деталь. 2 ил.
ел о ел
О)
Изобретение относится к робототехнике, р именно к конструкции исполнительных органов роботов-манипуляторов, и может рыть использовано для захвата деталей, меюп1их малую жесткость.
Целью изобретения является расширение технологических возможностей за счет обеспечения захвата цилиндрических деталей наружи.
На фиг. 1 показан схват в исходном состоянии; на фиг. 2 - то же, в |рабочем положении.
I Схват содержит корпус 1, на котором |установлены электрод 2, выполненный из |Электропроводного материала, покрытого диэлектриком в виде усеченного конуса, и электрод 3, выполненный в виде набора пластин, расположенных вокруг электрода 2. Последний установлен на корпусе 1 основанием болыпего диаметра. Электроды 2 и 3 подключены к источнику питания (не показан). Пластины электрода 3 выполнены с возможностью прогибания без остаточной деформации под действием сил электростатического воздействия, например из пормалоя, покрытого диэлектриком.
Схват работает следующим образом.
Электроды 2. и 3 подключают к источнику питания, между ними возникают электростатические силы притяжения, под действием которых электроды сближаются. Предварительно до подачи на электроды напряжения, с помощью механизма приво- да (не показан) захватываемая деталь 4 вводится в пространство между пластинами 3. Последние сходятся и захватываются деталь 4.
Степень прижатия пластин 3 к поверхности захватываемой детали 4 регулируется напряжением питания.
Для сброса детали производится отключение электродов от источника питания.
Формула изобретения
CxEiaT промышленного робота, содержащий корпус, на котором установлены два электрода, соединенные с источником питания, один из электродов выполнен в виде набора упругих пластин, расположенных вокруг другого электрода, отличающийся тем, что, с целью расширения технологических возможностей, второй электрод выполнен в виде усеченного конуса, установленного на корпусе основанием большего диаметра, причем длина первого электрода больше длины второго.
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1442398A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
