Изобретение относится к робототехнике, а именно к конструкции исполнительных органов роботов и манипуляторов, и может быть использовано для захвата деталей, имеющих малую жесткость и выполненных из токопроводного материала.
Цель изобретения - повышение надежности схвата.
На чертеже изображен схват, общий вид.
Схват содержит два электрода 1, выполненные в виде лепестков из металлизированной пленки полимерного материала или металлической фольги. Лепестки 1 связаны с установленными на корпусе (не показан) держателями 2 и через коммутатор подключены к источнику напряжения (не показано). На свободных концах лепестков 1 закреплены грузы 3 для их распрямления в исходном положении. К детали 4 лепестки 1 обращены нетокопроводной поверхностью.
Схват работает следующим образом.
С помощью механического привода (не показан) держатели 2 сводятся до контакта
лепестков 1 с захватываемой деталью 4, имеющей малую жесткость и изготовленной из электропроводного материала. При подаче на лепестки 1 напряжения они, заряжаясь, притягиваются к поверхности располагающейся между ними детали 4, облегая ее и осуществляя тем самым захват детали.
Формула изобретения
1. Схват, содержащий два связанных с корпусом электрода, соединенные через коммутатор с источником напряжения, отличающийся 7ем, что, с целью повыщения надежности, электроды выполнены в виде двух лепестков.
2.Схват по п. 1, отличающийся тем, что лепестки выполнены из металлической фольги.
3.Схват по п. 1, отличающийся тем, что лепестки выполнены из металлизированной
пленки полимерного материала.
4.Схват по пп. 1-3, отличающийся тем, что он снабжен двумя грузами, закрепленными на свободных концах лепестков.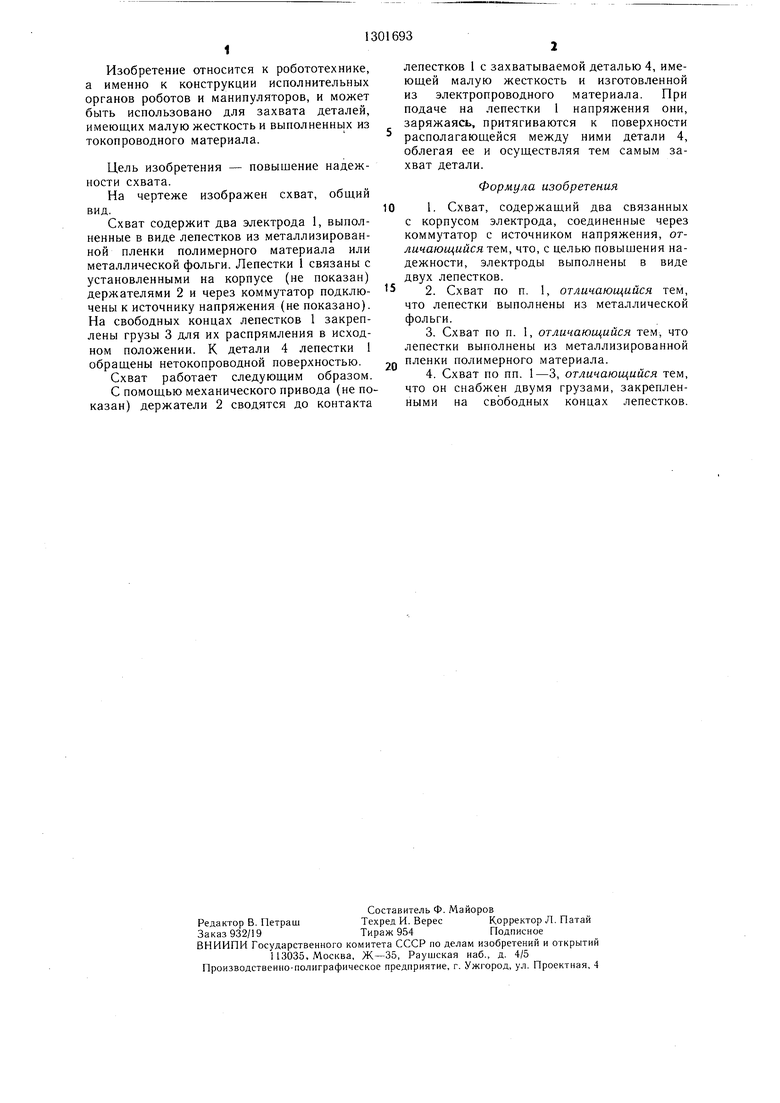
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1984 |
|
SU1215998A1 |
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1442398A1 |
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1505776A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1798182A1 |
| Схват робота | 1984 |
|
SU1175692A1 |
| Схват манипулятора | 1985 |
|
SU1288053A1 |
| Схват | 1985 |
|
SU1291392A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват манипулятора | 1984 |
|
SU1271743A2 |
Изобретение относится к робототехнике, а именно к конструкции исполнительных органов роботов и манипуляторов, и может быть использовано для захвата деталей, имеющих малую жесткость и выполненных из токопроводного материала. Целью изобретения является повышение надежности захвата. После сведения лепестков 1, представляющих собой электроды, выполненные из металлизированной пленки полимерного материала или металлической фольги, до контакта с захватываемой дета.- лью 4 на них подается напряжение и лепестки, заряжаясь, притягиваются к поверхности детали, осуществляя тем самым ее захват. Для распрямления лепестков 1 в исходном состоянии к их свободным концам прикреплены грузы 3. 3 з. п. ф-лы, 1 ил. (Л со Gi СО оо
| МАНИПУЛЯТОР | 1973 |
|
SU433024A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
