Саморазфужающигся вагоны, в которых платформа вначале перемещается поперек вагона, а затем поворачивается параллельно продольной оси вагона для разгрузки, известны.
Существенно новым в предложении является то, что, с целью использования механизмов, расположенных по торцам вагона и связывающих кинематически раму вагона с платформой для поперечного передвижения платформы и для ее поворота в каждом из этих механизмов применено звено, состоящее из кривошипа, совершающего при рабочем ходе поршня пневматического цилиндра круговое движение, и шатуна, шарнирно связанного с кривошипом и платформой, передвигающего платформу в поперечном направлении - при повороте кривошипа от мертвой верхней точки на 180° и поворачивающего платформу - при повороте кривошипа на 180°-360°.
Для разгрузки платформы в ту или другую сторону применены с каждой торцовой стороны платформы по две цапфы, расположенные на одинаковом расстоянии от средней
продольной оси платформы и служащие для шарнирного прикрепления головок шатунов к тем из них, которые находятся на стороне, противоположной разгрузке.
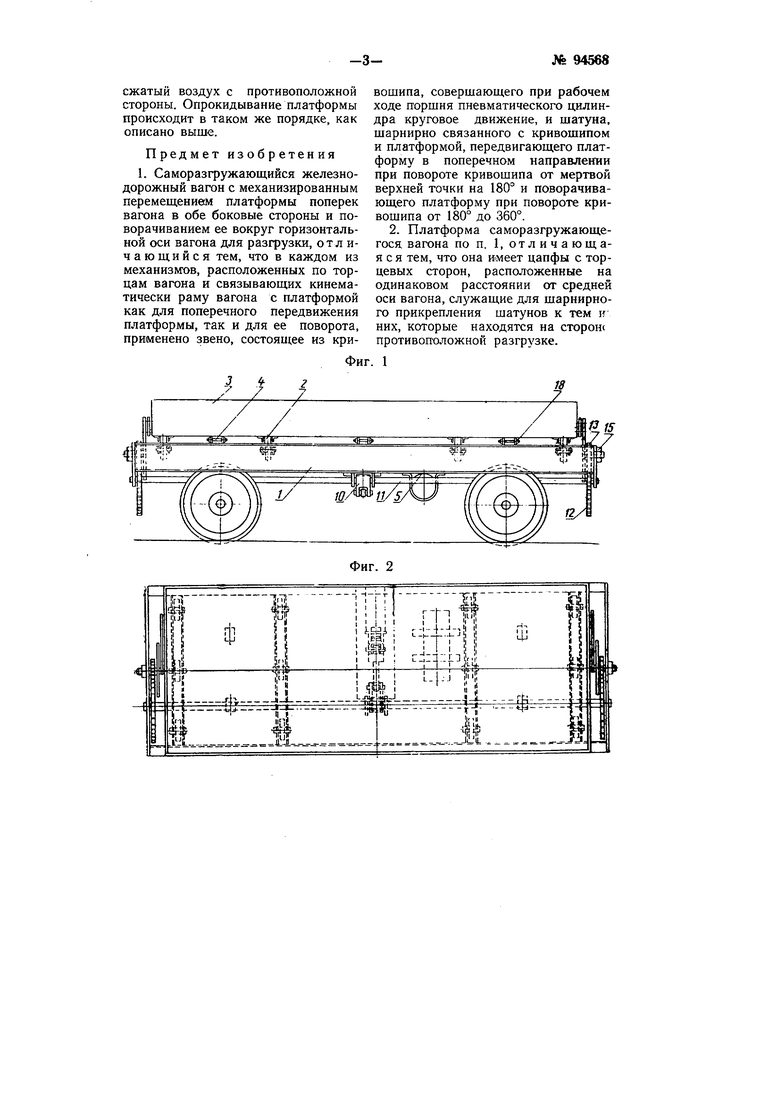
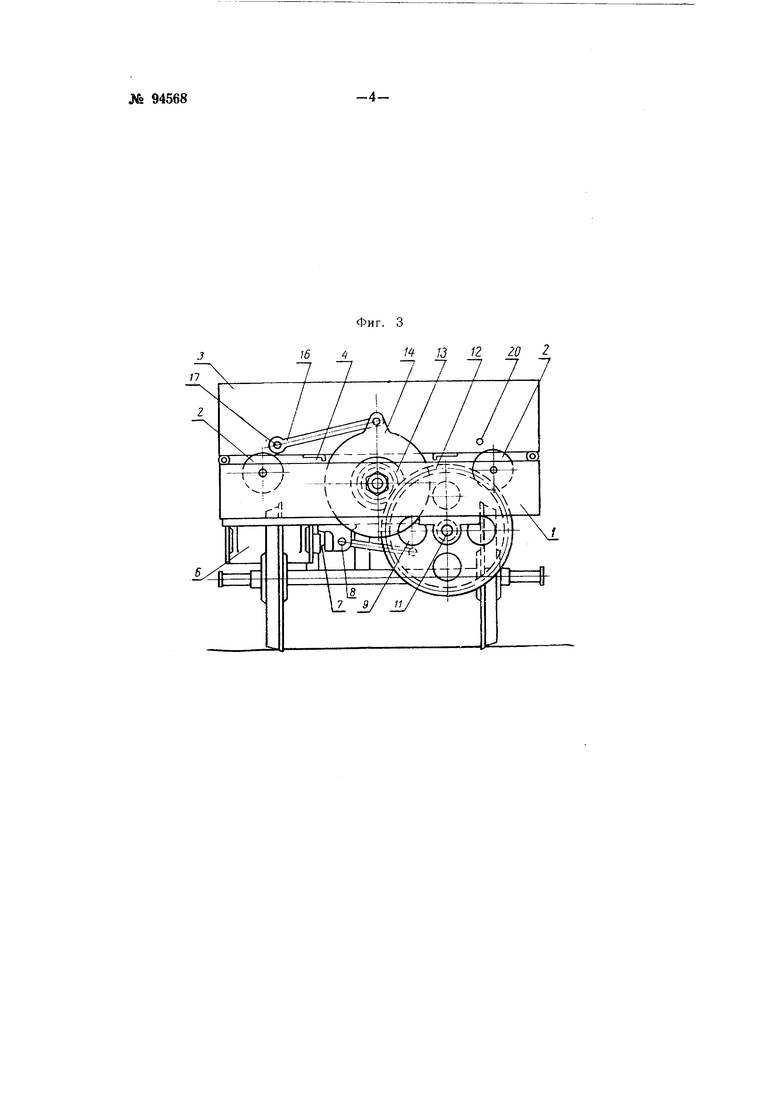
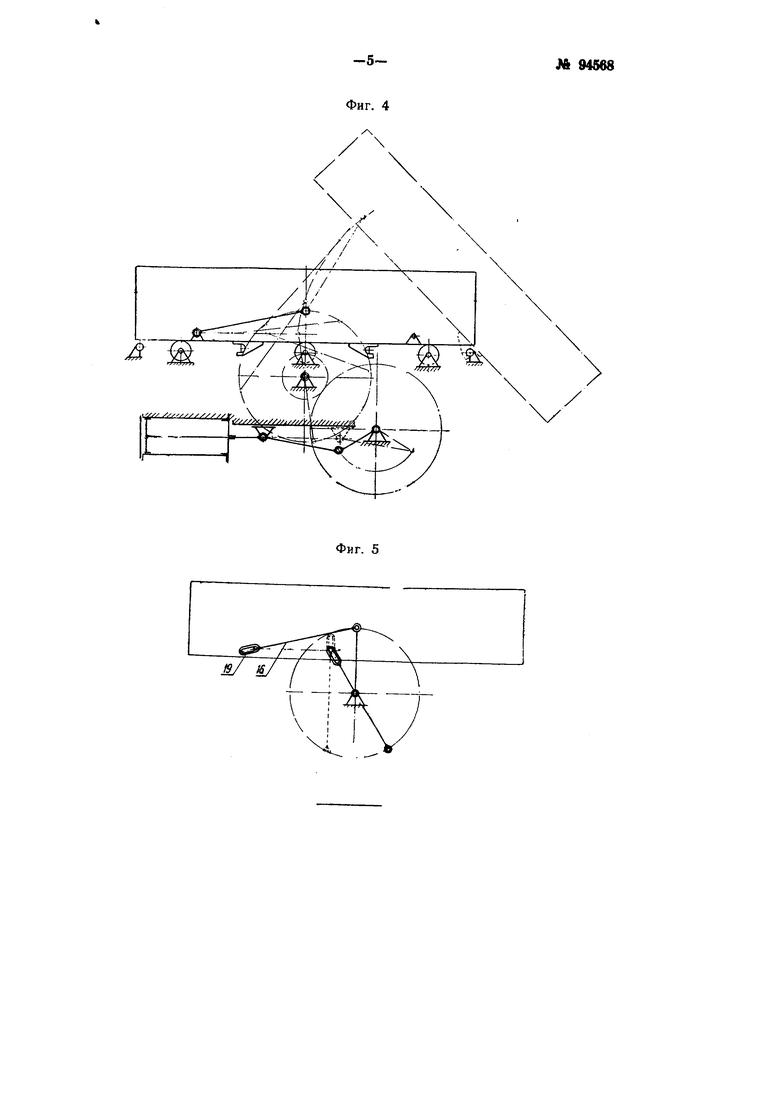
На фиг. 1 изображен саморазгружающийся вагон; на фиг. 2-вид его в плане; на фиг. 3 - вид с торца; на фиг. 4 - схема механизма поперечного передвижения платформы и ее поворота; на фиг. 5-схема крепления шатуна к цапфе на торцовой стороне платформы.
На раме / четырехосного или двухосного вагона на роликах 2 установлена платформа 3. По этим роликам платформа может двигаться относительно рамы в поперечном направлении. К днищу платформы прикреплены упоры 4, на которых поворачивается платформа при ее опрокидывании. В транспортном положении платформа удерживается на раме специальным автоматически действующим стопором. Платформа имеет борта, автоматически открывающиеся при ее наклоне.
Опрокидывание платформы производится при помощи сжатого воздуха, поступающего из воздушного резервуара 5 в цилиндр 6, укрепленный на раме /. Цилиндр связан с платформой посредством звеньев механизма (валов, зубчатых колес, кривошипов и шатунов), предназначенных для поперечного перемещения и опрокидывания платформы. Кинематическая цепь механизма позволяет производить наклон платформы на любую боковую сторону пути.
Этот механизм наклона платформы в равной степени применим и для автосамосвалов и прицепов к ним, причем сдвиг и опрокидывание кузова возможны как поперек машины или прицепа, так и вдоль оси машины или прицепа.
Опрокидывание платформы может производиться также при помощи гидравлических, электрических, механических и других приводов.
Устройство механизма опрокидывания заключается в следующем. Шток 7 воздушного цилиндра 6 неподвижно скреплен с ползуном 8, который может передвигаться по направляющим. Шатун 9 одним концом шарнирно соединен с ползуном 8. а другим концом с кривошипом W вала //. На обоих концах вала // наглухо насажены зубчатые колеса 12, сцепленные с зубчатыми колесами /5; последние наглухо соединены с дисками 14. Колеса 13 и диск 14 свободно вращаются на оси 15. К диксу 14 одним концом шарнирно прикреплен шатун 16, другой конец которого соединен с пальцем (цапфой) 17, закрепленным на торцевой стороне платформы 5.
Опрокидывание платформы происходит следующим образом.
В цилиндр 6 впускается из резервуара 5 сжатый воздух, который, наполняя цилиндр, давит на поршень и передвигает его. Вместе с поршнем передвигается шток 7 и ползун 8. Далее движение передается при помощи шатуна 9 через кривошип 10 валу // и зубчатым колесам 12, которые при этом начинают поворачиваться. От них вращение передается зубчатым колесам 13 и диском 14. Пос педние, поворачиваясь, при помощи шатунов 16 сдвигают предварительно освобожденную от закрепления автоматическими стопорами платформу 3 поперек рамы / вагона.
Сдвиг платформы происходит до тех пор, пока упоры 4 не дойдут до шарниров 18 опрокидывания. В этот момент шатун 16 проходит мертвую точку. Диск 14, продолжая поворачиваться, выводит шатун 16 из мертвого положения и последний начинает давить на платформу снпз.у вверх. Под действ1 ем этой силы платформа 5 поворачивается вокруг шарнира 18 опрокидывания до тех пор, пока не будет использован полный ход поршня цилиндра 6 п диск 14 не придет в первоначальное положение, сделав, таким образом, полный оборот. На этом опрокидывание платформы заканчивается.
Возвращение платформы в исходное положение осуществляется вращением механизма в обратную сторону. В начале это вращение происходит под действием силы тяжести платформы. Воздух при этом постепенно выпускается из цилиндра. Когда платформа, опускаясь, сядет на ролики, поворот механизма, а следовательно, л перемещение платформы в исходное положение, должно проис.ходить под действием сжатого воздуха, впускаемого в цилиндр 6 с обратной стороны. По возвращении платформы в транспортное положение она авто.матпчески закрепляется от поперечного сдвига специальным стопором.
Для уменьшения действующих в механизме усилий при прохождении шатуном 16 мертвого положения в головке шатуна 16 может быть сделана продольная прорезь 19. При этом мертвое положение механизма будет проходиться при неподвижной платформе за счет свободного хода шатуна 16, обеспечиваемого прорезью 19.
Выше было рассмотрено опрокидывание платформы в одну сторону. Для опрокидывания платформы в другую сторону необходимо отъединить головку шатуна 16 от пальца (цапфы) 17, пробуксовать вручную или сжатым воздухом механизм в противоположное крайнее положение и соединить головку щатуна 16 с пальцем (цапфой) 20, расположенном на другой стороне платформы относительно ее продольной оси. После этого в цилиндр 6 впускается
сжатый воздух с противоположной стороны. Опрокидывание платформы происходит в таком же порядке, как описано выше.
Предмет изобретения
1. Саморазгружающийся железнодорожный вагон с механизированным перемещением платформы поперек вагона в обе боковые стороны и поворачиванием ее вокруг горизонтальной оси вагона для разгрузки, от л ичающийся тем, что в каждом из механизмов, расположенных по торцам вагона и связывающих кинематически раму вагона с платформой как для поперечного передвижения платформы, так и для ее поворота, применено звено, состоящее из кривошипа, совершающего при рабочем ходе поршня пневматического цилиндра круговое движение, и шатуна, шарнирно связанного с кривошипом и платформой, передвигающего платформу в поперечном направлении при повороте кривошипа от мертвой верхней точки на 180° и поворачивающего платформу при повороте кривошипа от 180° до 360°.
2. Платформа саморазгружающегося вагона по п. 1, отличающаяся тем, что она Имеет цапфы с торцевых сторон, расположенные на одинаковом расстоянии от средней оси вагона, служащие для шарнирного прикрепления шатунов к тем и них, которые находятся на сторон( противоположной разгрузке.

И |i
ipr
,
-1---4
. г
-.
-J-,ll I
lU
.l--4l
JHi
L-1:J Т
I 1
II
/J /2
б
Фиг. 3
77777
