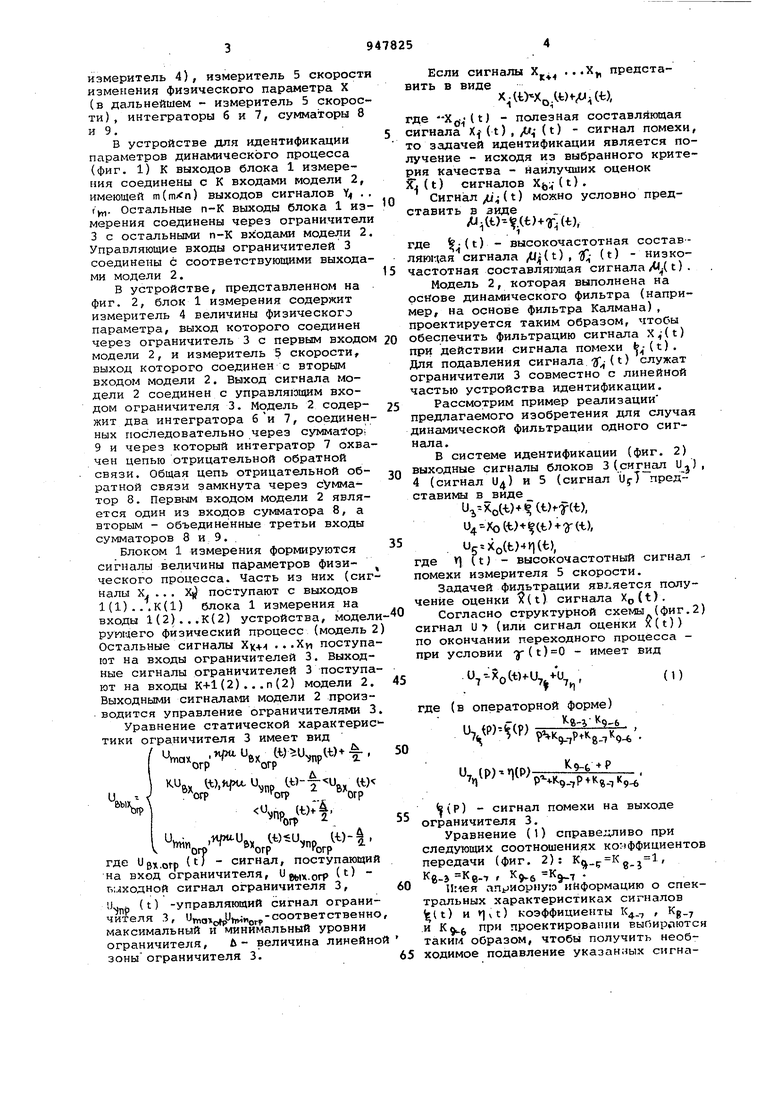
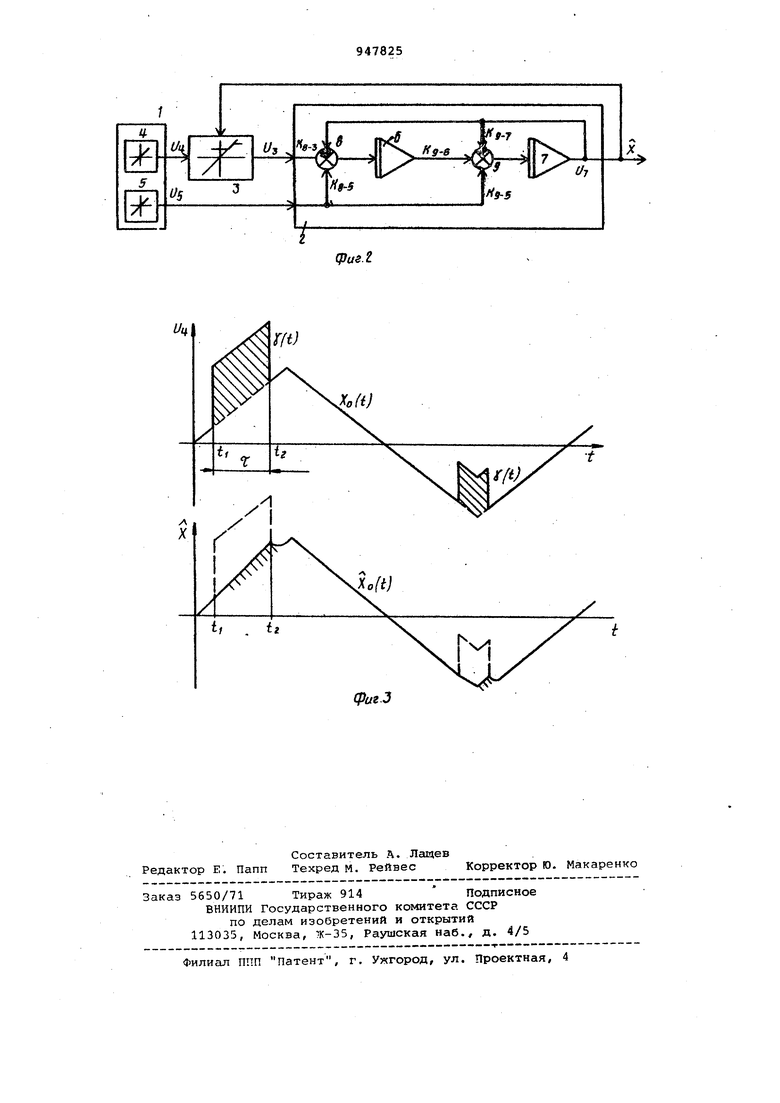
измеритель 4), измеритель 5 скорости изменения физического параметра X (в дальнейшем - измеритель 5 скорос ти) , интеграторы б и 7, сумматоры 8 и 9. В устройстве для идентификации параметров динамического процесса (фиг. 1) К выходов блока 1 измере 1ия соединены с К входами модели 2, имеющей m(mxn) выходов сигналов У . (. Остальные п-К выходы блока 1 из мерения соединены через ограничител 3 с остальными п-К входами модели 2 Управляющие входы ограничителей 3 соединены с соответствующими выхода ми модели 2. В устройстве, представленном на фиг. 2, блок 1 измерения содержит измеритель 4 величины физического параметра, выход которого соединен через ограничитель 3 с первым входом модели 2, и измеритель 5 скорости, выход которого соединен с вторым входом модели 2. Выход сигнала модели 2 соединен с управляющим входом ограничителя 3. Модель 2 содержит два интегратора 6и 7, соединен ных последовательно через сумматор; 9 и через который интегратор 7 охва чен цепью отрицательной обратной связи. Общая цепь отрицательной обратной связи замкнута через сумматор 8. Первым входом модели 2 является один из входов сумматора 8, а вторым - объединённые третьи входы сумматоров 8 и 9. . Блоком 1 измерения формируются сигналы величины параметров физического процесса. Часть из них (сиг налы X.... Х поступают с выходов 1(1)...К(1) блока 1 измерения на входы 1(2)...К(2) устройства, модел рупщего физический процесс (модель 2 Остальные сигналы Y, . . .Хц поступа ют на входы ограничителей 3. Выходные сигналы ограничителей 3 поступа ют на входы К+1(2) .. .п(2) модели 2. Выходными сигнсшами модели 2 производится управление ограничителями 3 Уравнение статической характерис тики ограничителя 3 имеет вид «Огр .. . ,w % о,.-|, «,. ., где Ug.ofp (t) - сигнал, поступающий на вход ограничителя, U g,,, (t) пиходной сигнал ограничителя 3, , (t) -управляющий сигнал ограничителя 3, и о и „ -соответственно максимальный и минимальный уровни ограничителя, 6- величина линейно зоны ограничителя 3. Если сигналы X. . . .X. предстак ..., вить в виде ), где Xp.-(t) - полезная составляющая сигнала Xf (t) , /tr (t) - сигнал помехи, то задачей идентификации является получение - исходя из выбранного критерия качества - Наилучших оценок JTj (t) сигналов (t) . Сигнал /и (t) можно условно представить в зиде /Jitu--.(t)4r;(t), где (t) - высокочастотная составляю1-.;ая сигнала JU(t) , 1f (t) - низкочастотная составляющая сигнала Л(,-( t) . Модель 2, которая выполнена на основе динамического фильтра (например, на основе фильтра Калмана), проектируется таким образом, чтобы обеспечить фильтрацию сигнала X,-(t) при действии сигнала помехи - (t) . Для подавления сигнала (t) служат ограничители 3 совместно с линейной частью устройства идентификации. Рассмотрим пример реализации предлагаемого изобретения для случая динамической фильтрации одного сигнала. В системе идентификации (фиг. 2) выходные сигналы блоков 3 (скткал ) , 4 (сигнал и) и 5 (сигнал UfT представимы в виде )+fCt)tf(t), ) + ra), U5--Xo(fc)4K|(t), где V) (t) - высокочастотный сигнал помехи измерителя 5 скорости. Задачей фильтрации является получение оценки )(t) сигнала Xo{t). Согласно структурной схемы (фиг.2) сигнал и 7 (или сигнал оценки X(t)) по окончании переходного процесса при условии y(t)0 - имеет вид м / где (в операторной форме) РЧк VK V l9-l 8-T 9-« и, (р)тр) 1 р%К.9.Р+К%.тК (Р) - сигнал помехи на выходе ограничителя 3. Уравнение (I) справедливо при следующих соотношениях ко:)ффициентов передачи (фиг. 2): Кл,..К ,1, V -V V -V ° Инея априорную информацию о спектральных характеристиках сигналов it) и ) коэффициенты К,-, , Kg. и К при проектировании выГ) таким образом, чтобы получить необходимое подавление указанных сигналов помехи. Если такое подавление обеспечивается, т.е.
((t), U Wtitt)
и при этом (t) не имеет постоянной составлягацей, то U f) )/ т.е. при фильтрации в сигнал Xo(t) не вносятся а Мплитудные и фазовые искажения .
ЕСЛИ в сигнале U4 присутствует
сигнал помехи y(t) и при этом
IrCfc)/
где величина Д определяется выражением
tJvnc Xorp twn огр
то в этом случае сигнал оценки X(t) (сигнал и) имеет вид
К ft I
;u,(p)x,tp)...(p;5p(j.
или, во временной области
u,ct) Хо W.Kg., f-()
В случае необходимости выходной сигнал может сниматься с выходов огг
раничителей 3 (пунктирная линия, фиг. 1). Этот сигнал фильтруется
-только за счет ограничения сигнала помехи, присутствующего в.измеряемом сигнале.
Таким образом, предлагаемое изобретение увеличивает точность и помехоустойчивость при идентификации при наличии низкочастотных помех в измеряемых сигналах.
Формула изобретения
Устройство.для идентификации парат метров динамического процесса, содержащее последовательно соединенные блок измерения параметров процесса и модель динамического процесса,
5 отличающееся тем, что, с целью увеличения точности идентификации -и помехоустойчивости устройства, оно содержит управляемые ограничители по числу сигналов коррекции
0 глодели, входы которых соединены с вторыми выходами блока, измерения параметров процесса, а выходы - с вторыми входами модели динамического процесса, выходы которой соединены с упрьв5лякйцими входами соответствующих ограничителей.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
0 по заявке 2848482/18-ОЭ,
кл. Н 03 Н 21/00, 1980.
2.Ривкин В.В. Использование фильтров Капмана в инерциальных навигациоцных система.х. Судостроение, Л.,
5 1974 с. 88-95 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический фильтр | 1986 |
|
SU1388828A1 |
| Комбинированная система управления | 1987 |
|
SU1536352A1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Нелинейный фильтр | 1984 |
|
SU1233101A1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Устройство для функционального контроля систем управления | 1977 |
|
SU732820A1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Субоптимальный фильтр для оценки параметра случайного процесса | 1989 |
|
SU1619307A1 |
| Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости | 1986 |
|
SU1432457A1 |
/
фиг.З
