Известные автоматические устройства для изменения направления транспортирования цилиндрических изделий, в частности поршней, с передачей изделий от одной ветви транспортера к другой в перпендикулярном направлении и изменением их соосного поло 1ения на параллельное, обладают тем недостатком, что не исключают возможности перекосов изделий.
В предлагаемом устройстве указанный недостаток устранен тем, что в нем применена перегрузочная каретка в виде открытого желоба, выполненная плоскопараллельно подвижной в осевой плоскости подаюа1ей ветви транспортера.
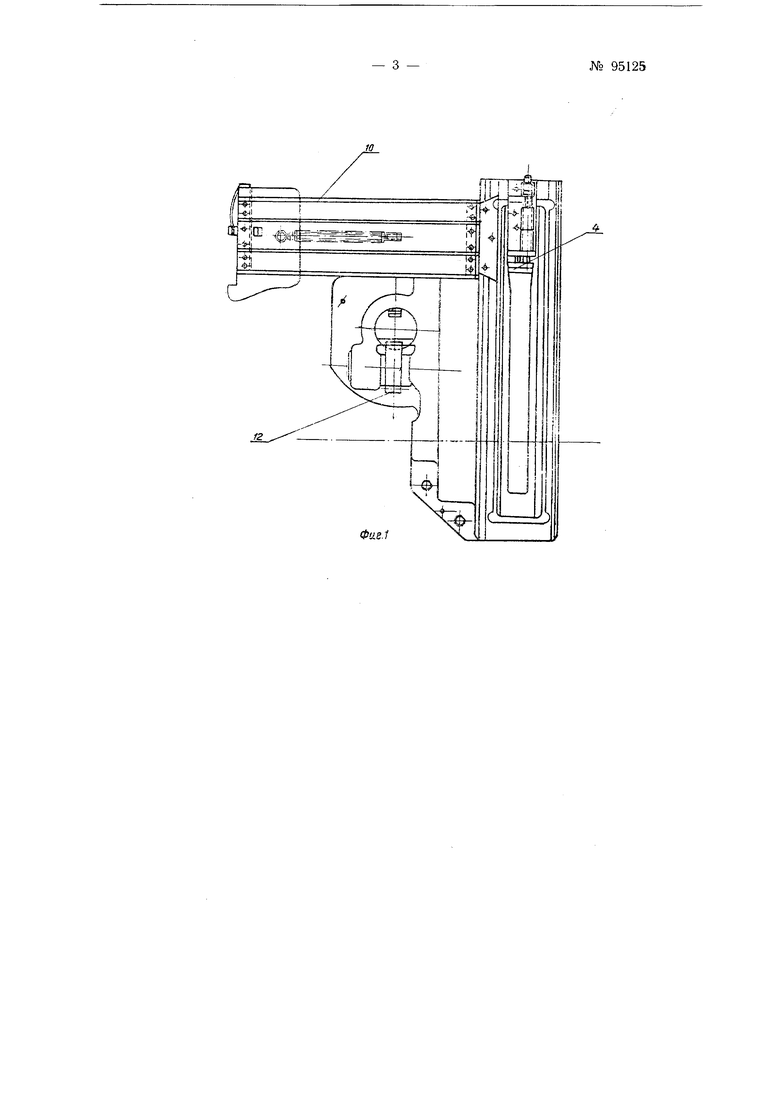
На фиг. 1 схематически изображен вид устройства в плане; на фиг. 2 - предлагаемое устройство з разрезе.
Соосно расположеньые изделия 7, перекладываемые за один цикл, поступают с подающей ветви транспортера в направлении стрелки А по ножам 2 корпуса 3 до жесткого регулируемого упора 4.
Перегрузочная каретка 5 выполнена плоскопараллельно подвижной в осевой плоскости подающей ветви транспортера. Конструктивно перегрузочная каретка 5 выполнена в виде открытого желоба, параллельные направляющие которого имеют ножи 6.
Плоскопараллельное движение каретке сообщается двумя кривошипами 7 через цапфы 8. За один оборот кривошипов каретка поднимается вверх, ножами 6 поднимает всю групну изделий, лежащую на ножах 2, переносит их вперед на расстояние, равное длине изделия, и опускается вниз, возвращаясь в исходное положение. При зтом она оставляет переднее изделие на узкой консольно укрепленной односторонне скошенной площадке 9, а остальные изделия перекладываемой группы - на ножах 2, перемещенными вперед на расстояние, равное длине одного изделия. Изделия в процессе переноса их кареткой 5 сохраняют горизонтальное пололсение. Изделие, оставленное кареткой на площадке 9, скатывается в лоток 10, расположенный перпендикулярно к подающей ветви транспортера.
№,95125
Кривошипы 7 приводятся во вращение рейкой // через зубчатыг колеса 12, 13 и выполненные за одно целое с кривошипами 7 зубчатые колеса 14. Рейка 11 приводится в движение гидравлическим цилиндром или другим устройством.
За один рабочий ход рейки кривошипы 7 делают количество оборотов, равное количеству изделий, перекладываемых за один цикл, и вся группа изделий кареткой 5 переносится на площадку 9 и далее в лоток 10, в котором они располагаются, касаясь друг друга образующими.
Предмет изобретения
1.Автоматическое устройство для изменения направления транспортирования цилиндрических изделий, в частности поршней, с передачей изделий от одной ветви транспортера к другой в перпендикулярком направлении и изменением их соосного положения на параллельное, отличающееся тем, что, с целью устранения перекоса изделий при их передаче в горизонтальной плоскости на перпендикулярную ветвь транспортера, оно снабжено перегрузочной кареткой, выполненной плоскопараллельно подвижной в осевой плоскости подающей ветви транспортера.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что, с целью перемещения перегрузочной каретки в осевой плоскости подающей ветви транспортера, последняя выполнена в виде открытого желоба, образованного поверхностями двух параллельных направляющих.
3.Форма выполнения устройства по пп. 1 и 2, отличающаяся тем, что, с целью съема очередного изделия движущейся перегрузочпой каретки в месте стыка двух перпендикулярных ветвей транспортера, в осевой плоскости подающего транспортера консольно укреплена узкая односторонне скощенная площадка, свободно проходящая между двумя параллельными стенками перегрузочной каретки.
4.Форма выполнения устройства по пп. 1, 2 и 3, отличающаяся тем, что, с целью сообщения перегрузочной каретки плоскопараллельного движения, каретка установлена на двух параллельных кинематически связанных кривощипах, получающих синхронное вращение..
.S.1

| название | год | авторы | номер документа |
|---|---|---|---|
| Бункер для загрузки станков | 1950 |
|
SU93712A1 |
| Автоматическая линия агрегатных станков для механической обработки поршней и тому подобных деталей | 1950 |
|
SU94814A1 |
| Транспортер для перемещения цилиндрических изделий | 1950 |
|
SU93837A1 |
| Машина для упаковки цилиндрических деталей | 1950 |
|
SU93591A1 |
| Автоматический перегружатель цилиндрических изделий | 1950 |
|
SU93939A1 |
| Автоматическое устройство для контроля заданного расположения цилиндрических изделий, в частности поршней, при их транспортировании | 1950 |
|
SU93465A1 |
| Механизм для усваивания хода | 1950 |
|
SU93312A1 |
| Автоматическое устройство для загрузки конвейера | 1950 |
|
SU95193A1 |
| Автоматическое делительное устройство | 1950 |
|
SU93711A1 |
| Устройство для транспортирования изделий с поворотом их в пространстве | 1950 |
|
SU93807A1 |