1
Изобретение может быть использовано в машиностроительной, местной и других областях промышленности, когда исполнительный механизм должен получить автоматически без вмешательства 5 оператора максимальное число различных команд, связанных закономерной последовательностью.
Интерес оно представляет также и , для предприятий местной промышленноетй, производящих замочные изделия.
Известны командоаппараты, которые обеспечивают выполнение станком заданной программы, записанной на перфорационной ленте; обеспечивающие програм-15 му с помощью установленньЬс заранее в необходимом наборе переключателей на панели; работающие на принципе механизма соосного счетчика или обеспечивающие выполнение заданной программы, 20 записанной на магнитной ленте 1,Р .
При этом выполняется необходимая последовательность, величина и скорость перемещения рабочих органов станков..25
Недсютатком известных командоаппаратов является их сложность и необходимость обслуживания специалистами высокой квалификации, которая оправдана в мелкосерийном производстве, 30
при необходимости частой смены систе «1Ы команд.В УСЛОВИЯХ серийного и массового производства, когда нет необЬсодимости в частой смене системы команд, такие командоаппараты нецелесообразны.
Ближайшим из известных к заявляемому является командоаппарат с периодическим движением 2.
На валу данного командоаппарата жестко укреплены кулачки, обеспечивающие выполнение всех фаз цикла за один оборот.
Каждый кулачок руководит определенным функциональным механизмом.
После выполнения каждой предыдущей команды реечно-храповой механизм с приводом от гидро-, пневмоцилиндра поворачивает вал на УГОЛ между секторами куЛачк.ов, обеспечивая выполнение последующихкоманд каждым кулачком. После этого привод вращения вала командоаппарата отключается до получения сигнала об исполнении предшествующей команды.
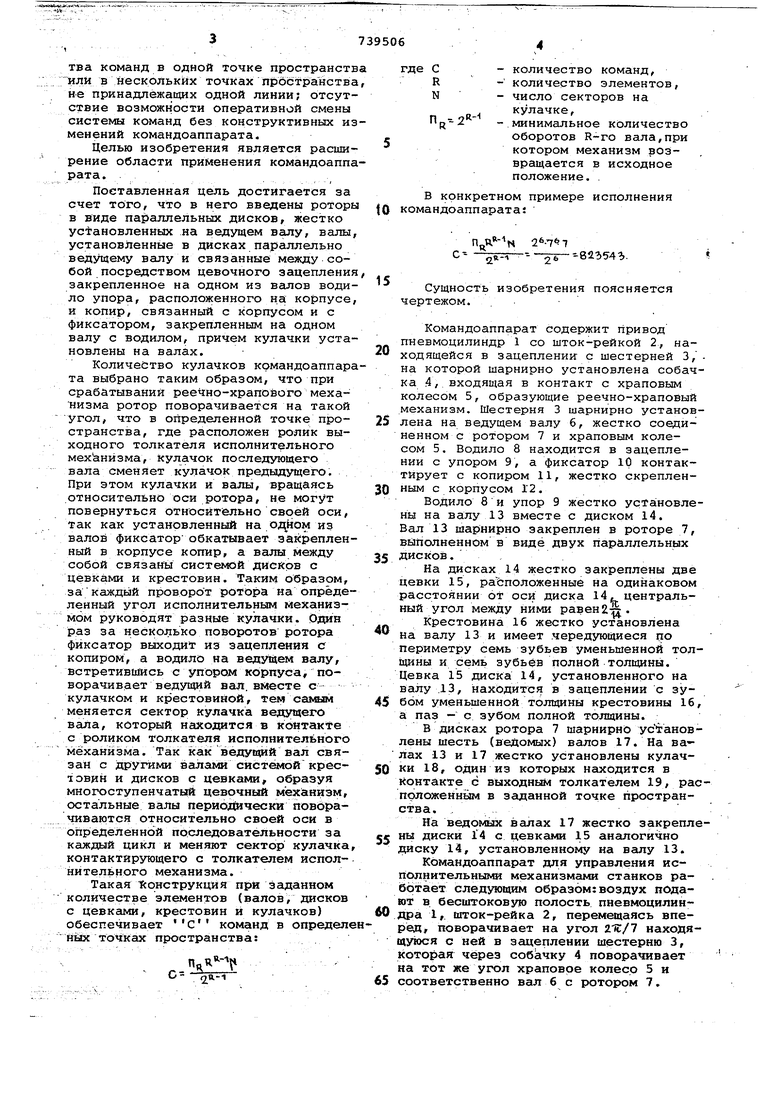
Недостатками командоаппарата являются ограниченность числа вариантов команд, которые обеспечиваются без вмешательства оператора; невозможность получения заданного количества команд в одной точке пространст или в нескольких точках пространств не принадлежащих одной линии; отсут ствие возможности оперативной смены системы команд без конструктивных и менений командоаппарата. Целью изобретения является расши рение области применения командоапп рата. Поставленная цель достигается за счет того, что в него введены ротор в виде параллельных дисков, жестко установленных на ведущем валу, валы установленные в дисках параллельно ведущему валу и связанные между собой посредством цевочного зацеплени закрепленное на одном из валов води ло упора, расположенного на корпусе и копир, связанный с корпусом и с фиксатором, закрепленным на одном валу с водилом, причем кулачки уста новлены на валах. Количество кулачков командоаппар та выбрано таким образом, что при срабатываний реечно-храпового механизма ротор поворачивается на такой УГОЛ, что в определенной точке пространства, где расположен ролик выходного толкателя исполнительного механизма, кулачок последукицего вала сменяет кулачок предыдущего. При этом кулачки и валы, вращаясь относительно оси ротора, не могут повернуться относительно своей оси, так как установленный на оду1Ом из валов фиксатор обкатывает закреплен ный в корпусе копир, а валы между собой связаны системой дисков с цевками и крестовин. Таким Образом, закаждьай проворот ротора на опреде ленный угол исполнительным механизмом руководят разные кулачки. Один раз за несколько поворотов ротора фиксатор выходит из зацепления с копиром, а водило на ведущем валу, встретивишсь с упором корпуса, поворачивает ведущий вал. вместе с кулачком и крестовийой, тем самым меняется сектор кулачка ведущего вала, который находится в контакте с роликом толкателя исполнительного механизма. Так как ведущий вал связан с другами валами системой кресioBHH и дисков с цевками, образуя многоступенчатьлй цевочный мех анизм, остальные валы перио,1(ически поворачиваются относительно своей оси в определенной последовательности за каждый цикл и меняют сектор кулачка контактирующего с толкателем исполнительного механизма. Такая Тйонструкцйя при заданном количестве элементов (валов, дисков с цевками, крестовин и кулачков) обеспечивает команд в определ нах точках пространства: где С - количество команд, R - количество элементов, N - число секторов на кулачке, П,-2 минимальное количество оборотов R-ro вала,при котором механизм возвращается в исходное положение. . В конкретном примере исполнения командоаппарата; П Я-N - RM---2-6--82354 г. Сущность изобретения поясняется чертежом. . Командоаппарат содержит привод пневмоцилиндр 1 со шток-рейкой 2, находящейся в зацеплении с шестерней 3, на которой шарнирно установлена собачка 4, входящая в контакт с храповым колесом 5, образующие реечно-храповый механизм. Шестерня 3 шарнирно установлена на ведущем валу 6, жестко соединенном с ротором 7 и храповым колесом 5. Водило 8 находится в зацеплении с упором 9, а фиксатор 10 контактирует с копиром 11, жестко скрепленным с корпусом 12. Водило 8 и упор 9 жестко ус ановлены на валу 13 вместе с диском 14. Вал 13 шарнирно закреплен в роторе 7, выполненном в виде двух параллельных дисков. На дисках 14 жестко закреплены две девки 15, расположенные на одинаковом расстоянии оТ оси диска 14. центральный угол между ними равен 2 ;Крестовина 16 жестко установлена на валу 13 и имеет чередующиеся по периметру семь зубьев уменьшенной толщины и семь зубьев полной толщины. Цевка 15 диска 14, установленного на валу .13, находится в зацеплении с зуббм уменьшенной толщины крестовины 16, а паз - с зубом полной толщины. В дисках ротора 7 шарнирно установлены шесть (ведомых) валов 17. На валах 13 и 17 жестко установлены кулачки 18, один из которых находится в контакте с выходным толкателем 19, расположением в заданной точке пространства. На ведомых валах 17 жестко закреплены диски 14 с цевками 15 аналогично диску 14, установленному иа валу 13. Командоаппарат для управления исполнительными механизмами станков работает следующим образом:воздух подают в бесштоковую полость пневмоцилиндра 1, шток-рейка 2, перемещаясь вперед, поворачивает на угол iK/l находящуюся с ней в зацеплении шестерню 3, которая через собачку 4 поворачивает на тот же угол храповое колесо 5 и соответственно вал 6 с ротором 7.
Водило 8 входит в контакт с упором 9, а фиксатор 10 попадает в паз копира 11, установленного на корпусе 12, и вал 13 проворачивается.
Одновременно с вгшом 13 проворачивается диск 14, который цевкой 15 входит в зацепление с зубом уменьшенной толщины крестовины 16, установленной на валу 17, а пазом - с зубом полной толщины.
После проёорота валов 13 и 17 води ло 8 выходит из зацепления с упором 9 а фиксатор 10 входит в контакт с копиром 11.
В результате углового перемещения валов 13 и 17 меняется общее взаимное расположение кулачков 18, определяющее необходимое сочетание серии группы в системе команд командоаппарата.
По окончании поворота вала 6с ротором 7 под толкателем 19 устанавливается следующий кулачок 18.
При подаче воздуха в штоковую полость .пневмодилй ндра 1 шток-рейка. 2 возвращается в исходное положение вместе с шестерней 3 , собачка 4 проскальзьтает по храповому колесу 5, а положение ротора 7 остается неизменным.
При последующих шести .угловых перемещениях ротора 7 взаимное расположение кулачков 18 не меняется.
Фиксатор 10 скольз.ит по копиру 11 и фиксирует взаимное расположение кулачков 18.
. Когда ротор 7 совершит полный оборот, цикл повторяется. Однако конструкция крестовин 16 и дисков 14 с . Цевками 15 и их расположение на валах 13 и 17 при прследующих циклах позволяет получить следующий результат. . .
При одном полном обороте каждого предыдущего вала последующий вал совершает угловое перемещение на угол 411/7, что позволяет получить полное количество сочетаний группы, состоящей из семи команд.
Использование предлагаемого изобретения позволит повысить секретность замков и улучшить качество ключей; увеличить производительность в семь раз.
Формула изобретения
Командоаппарат.для управления исполнительными механизмами станков, содержащий корпус, реечно-храповый механизм , жестко соединенный с ведущим валом и приводом, подключенным к входному управляющему каналу, и выходной толкатель, установленный в плоскости вращения кулачков, от-, личающийся тем, что, с целью расширения области применения, в него введены роторы в виде паралпельных дисков, жестко установленных на ведущем валу, валы, установленные в дисках параллельно ведущему валу и связанные между собой посредством цевочного зацепления, закрепленное н одном из валов водило упора, расположенного на корпусе, и копир, связанный с корпусом и с фиксатором, закрепленным на одном валу с водилом, .причем кулачки установлены на валах.
Источники информации, принятые во внимание при экспертизе
1.Рабинович А.Е. Автоматизация механосдорочнОго производства,Киев, Наука, 1964, с.221, рис.144.
2.Рабинович А.Е. Автоматизация механосборочного производств а,Киев, Наука, 1964, с.31, рис.6 (прототип) .
.. v/.- i
f ;r tf,.
739506
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат для управления исполнительными механизмами станков | 1987 |
|
SU1474626A1 |
| Полуавтомат для обработки пазов | 1979 |
|
SU770681A1 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для упаковки сыпучего материала в клапанные мешки | 1982 |
|
SU1113308A1 |
| Устройство для алмазного выглаживания поверхностей деталей | 1980 |
|
SU933411A1 |
| Устройство для расфасовки и упаковки сыпучих материалов в коробки | 1981 |
|
SU969598A1 |
| Командоаппарат | 1984 |
|
SU1399832A1 |
| Устройство для контроля бутылок с жидкостью | 1952 |
|
SU100675A1 |
is,i 4«3iyv - 4 - -л.-..
10
в
/J
