(54) УСТРОЙСТВО ДЛЯ ОБРАБОТКИ КУЛАЧКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки кулачков | 1979 |
|
SU795753A1 |
| Устройство для обработки кулачков | 1979 |
|
SU865556A1 |
| Устройство для обработки кулачков | 1978 |
|
SU816699A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЗУБЧАТЫХ КОЛЕС | 1994 |
|
RU2074794C1 |
| Устройство для обработки кольцевого желоба переменного профиля | 1973 |
|
SU515628A1 |
| Устройство для обработки диамет-РАльНыХ КулАчКОВ | 1979 |
|
SU837606A1 |
| УСТРОЙСТВО для ПОДАЧИ и УПРАВЛЕНИЯ СКОРОСТЬЮ ЗАГОТОВКИ ПРИ ПРОКАТКЕ ПЕРИОДИЧЕСКИХ ПРОФИЛЕЙ | 1972 |
|
SU348267A1 |
| Планетарно-кривошипный механизм возвратно-поступательного движения | 1983 |
|
SU1130711A1 |
| Механизм привода каретки плосковязальной машины | 1990 |
|
SU1730266A1 |
| ПРИВОД РЕМИЗНЫХ РАМ РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ | 2000 |
|
RU2167964C1 |
1
Изобретение относится к станкостроению и .,может быть использовано для обработки диаметральных кулачков с симметричным профилем.
Известны устройства, подобного назначения с размещенной с возможностью поступательного перемещения от кривощипа, кинематически связанного с камнем, кареткой и установленным на ней поворотным столом для детали, кинематически связанным с выщеуказанным кривощипом 1.
Однако однообразие основного закона перемещения каретки сужает область применения получаемых кулачков.
Цель изобретения - расщирение технологических возможностей.
Поставленная цель достигается тем, что в устройстве связь между кривошипом и камнем выполнена в виде двухколесного планетарного механизма, центральное колесо которого жестко установлено на каретке, а камень - на сателлите, шарнирно связанном с кривощипом.
Кроме того, планетарный механизм выполнен в виде гипоциклоидной передачи.
Причем планетарный механизм выполнен в виде эпициклоидной передачи.
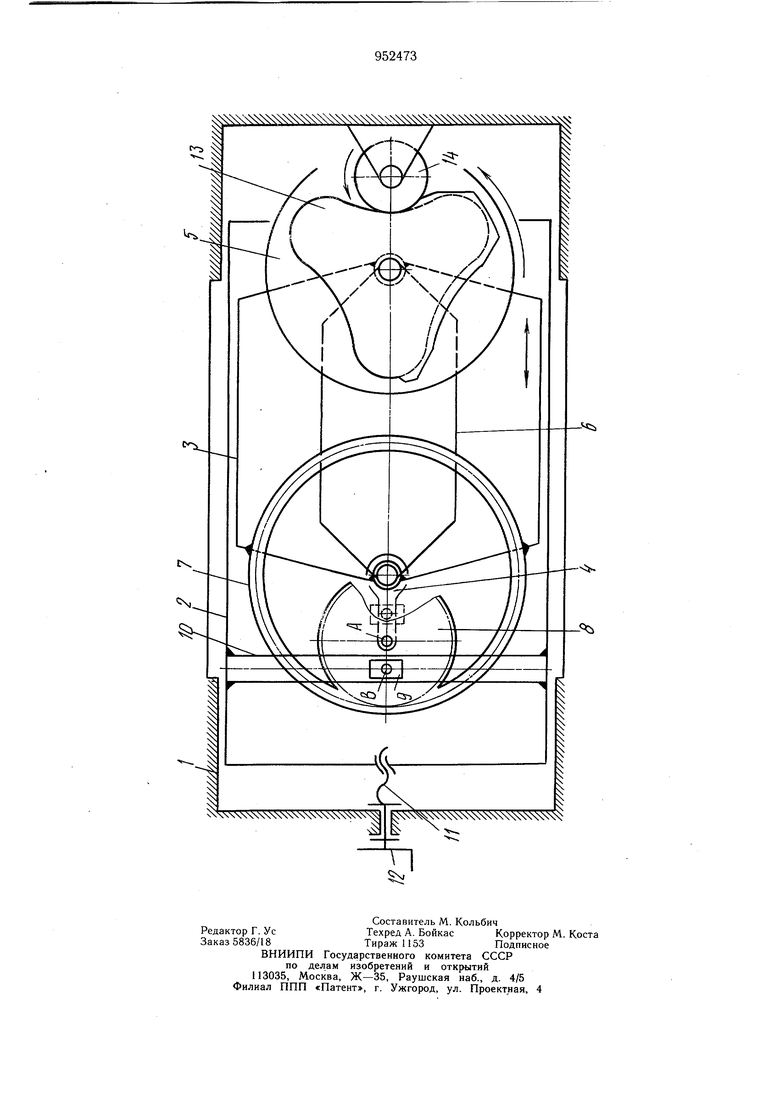
На чертеже представлена схема предлагаемого устройства.
Устройство содержит станину 1, в направляющих которой установлены салазки 2. В направляющих салазок, которые параллельны направляющим станины, установлена каретка 3. На каретке размещены задающий кривощип 4 и поворотный стол 5, а также кинематически связывающий их редуктор 6. Задающий кривощип 4 кинематически связан планетарными механизмом
10 зубчатых колес 7 и 8 с камнем 9, а при помощи его - с направляющими 10 салазок 2. Салазки связаны со станиной винтовой парой 11 с маховиком 12. На поворотном столе 5 устанавливают .заготовку 13, с которой взаимодействует рабочий орган 14.
Центральное зубчатое колесо 7 планетарного механизма жестко закреплено -на каретке, а колесо 8 посредством щарнира А установлен на задающем кривощипе. При 2Q этом задающий кривощип является одновременно водилом планетарного механизма. Камень 9 связан с сателлитом посредством щарнира В.
При выполнении центрального колеса 7 с внутренними зубьями (показано) планетарный механизм будет гипоциклоидным, а с внешними зубьями - эпициклоидным. Прямая, соединяющая центры вращения поворотного стояа и рабочего органа, параллельна направлению перемещения салазок и каретки. При вращении задающего кривошипа 4 его непрерывное движение через колеса 7 и 8, камень 9 и неподвижные направляющие 10 преобразуется в непрерывное возвратно-поступательное движение каретки 3. Одновременно вращение задающего кривошипа через редуктор 6 преобразуется в непрерывное вращение стола 5. Таким образом, стол 5 получает переносное непрерывное возвратно-поступательное движение вместе с кареткой и относительное непрерывное вращательное движение относительно каретки. При этом рабочий орган 14 будет обрабатывать профиль кулачка на заготовке 13, установленной на столе 5. Полный профиль одного зуба обрабатывается при повороте задающего кривошипа на угол 2л, при котором каретка совершает полное колебание. При передаточном отношении редуктора 6 между задающим кривошипом и столом равном , где п - целое число, на заготовке будет обрабатьшаться п - зубый кулачок. Характеристика изменения профиля каждого зуба кулачка, зависящая от возвратно-поступательного перемещения каретки и выражающаяся через безразмерный коэффициент пути, определяется следующими зависимостями: при гипоциклоидном выполнении планетарного механизма (р- 0(l-coskri.)±q l-cos(p-l)kril 5 2(р -)±q 1 -cos(p-Ori выполнении планепри эпициклоидном тарного механизма S ((t- os J- -S-Cl CosCp-H)hjl )4 l- osCP- 0 0 где р и q - параметры планетарного механизма, равные соответственно отношению радиуса начальной окружности центрального колеса к радиусу начальной окружности сателлита и отношению расстояния между шарнирами А и В к радиусу начальной окружности сателлита; К - безразмерный коэффициент угла поворота задающего кривошипа и кулачка при обработке одного зуба. Знак плюс в зависимостях (1) и (2) характеризует внешнее расположение шарнира В (камня 9) относительно задающего кривощипа 4 в исходном положении (показано сплошными линиями), а знак минус - внутреннее расположение (пунктирные линии). При нечетном числе зубьев кулачка и параметре р планетарного механизма, равном четному числу, устройство будет обрабатывать диаметральные кулачки с симметричным профилем каждого зуба. Величина амплитуды колебания каретки и хода обрабатываемого кулачка устанавливается путем изменения длины задающего кривошипа, расстояния АВ и расположения камня 9 относительно шарнира А (внутреннее или внешнее). Начальное положение заготовки относительно рабочего органа и соответственно радиус начальной шайбы кулачка устанавливается перемещением салазок 2 с кареткой 3 посредством винтовой пары И от маховика 12. Предложенное устройство позволяет изготавливать многозубые диаметральные кулачки с расширенными характеристиками симметричного профиля, зависящими от возвратно-поступательного перемещения каретки, за счет изменения вида планетарного механизма и его параметров. Формула изобретения 1.Устройство для обработки кулачков с размещенной с возможностью поступательного перемещения от кривошипа, кинематически связанного с камнем, кареткой и установленным на ней поворотным столом для детали, кинематически связанным с кривошипом, отличающееся тем, что, с целью расширения технологических возможностей, кинематическая связь между кривошипом и камнем выполнена в виде двухколесного планетарного механизма, центральное колесо которого жестко установлено на каретке, а камень - на сателлите, шарнирно связанном с кривошипом. 2.Устройство по п. 1, отличающееся тем, что планетарный механизм выполнен в виде гипоциклоидной передачи. 3.Устройство по п. 1, отличающееся тем, что планетарный .механизм выполнен в виде эпициклоидной передачи. Источники информации, принятые во внимание при экспертизе 1. Артоболевский И. И. Механизмы в современной технике. М., «Наука, 1973, т. 3, с. 238.
