Изобретение относится к машино строению и может быть использовано в робототехнических устройствах.
Известно запястье манипулятора, содержащее корпус, кисть, схват, приводные валы, механизмы качения и вращения схвата 11.
Недостатком данного устройства является то, что вращение и качение кисти кинематически зависимы друг от друга. Такое конструктивное решение сложно.
Цель изобретения - упрощение конструкции .
Цель достигается тем, что механизм вращения схвата выполнен в виде зубчато-реечной передачи, состоящей из двух зубчатых колес и рейки, причем одно из зубчатых колес жестко связано со охватом, а дру1:ое закреплено на одном из приводных валов, при этом рейка вьшолнена из двух частей, соединенных между собой с воз- можностью поворота относительно их общей продольной оси.
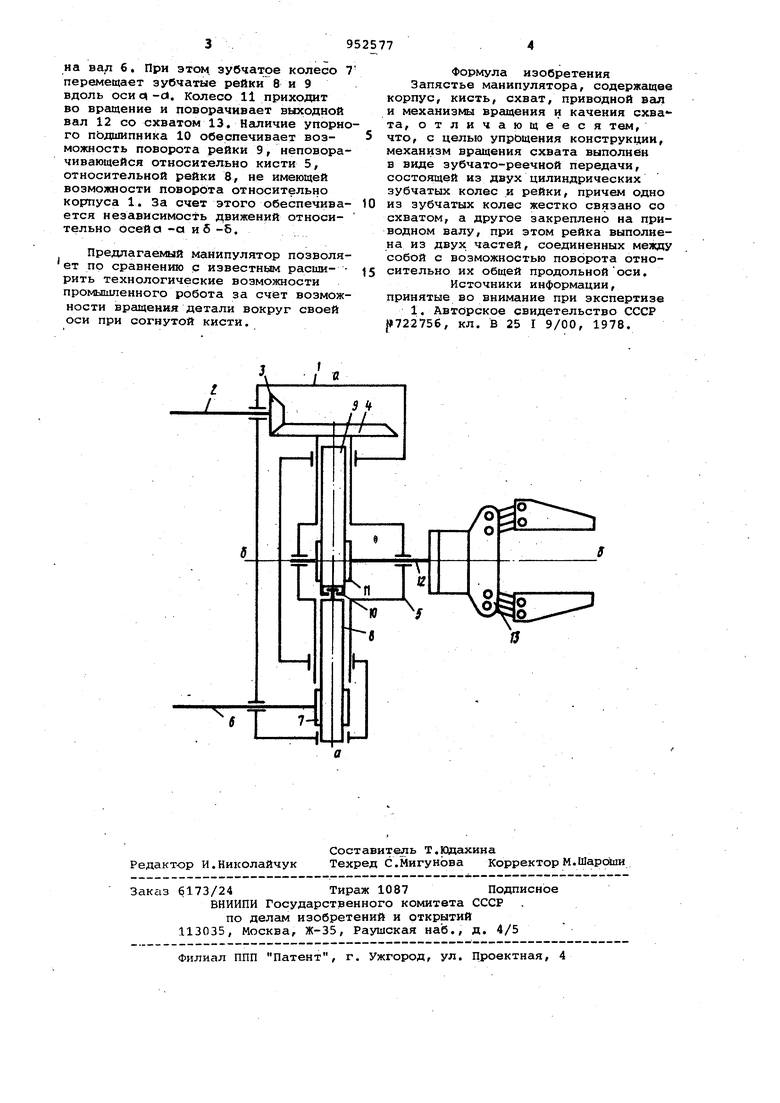
На чертеже схематически изображено запястье манипулятора.
Запястье манипулятора включает в себя два механизма: механизм качения
и механизм вращения, установленные в корпусе 1.
Механизм качения состоит из приводного вала 2 с конической шестерней 3J находящейся в зацеплении с коническим колесом 4, закрепленным, в свею очередь, на кисти 5.
Механизм вращения состоит из Оприводного вала 6 с цилиндрическим зуб10чатым колесом 7, которое находится в зацеплении с рейкой, состоящей из двух частей 8 и 9. Части 8 и 9 соединены между собой посредством упорного подшипника 10 и имеют возможность
15 поворота относительно друг друга по оси а-а. Часть 9 зубчатой рейки находится в зацеплении с зубчатым колесом 11, которое закреплено на выходном валу 12. К выходному валу 12, распо20ложенному по оси 5-5, крепится схват 13. Ось 5-5 поднята относительно оси в-а на величину равную радиусу зубчатого колеса 11.
25
Запястье работает следующим образом.
Вал 2 через коническую шестерню 3 и колесо 4 качает кисть 5 относи, тельно оси а-а. Для осуществления 30 вращения схват 13 вращения подается
на вал 6, При этом, зубчатое колесо 7 перемещает зубчатые рейки 8 и 9 вдоль оси ез|-rt. Колесо 11 приходит во вргидение и поворачивает выходной вал 12 со скватом 13. Наличие упорного пЬдшипника 10 обеспечивает возможность поворота рейки 9, неповорачивающейся относительно кисти 5, относительной рейки 8, не имеющей возможности поворота о-гносительно корпуса 1. За счет этого обеспечивается независимость движений относительно осей а -а и б -б.
Предлагаемый манипулятор позволяет пр сравнению с известным расши- рить технологические возможности промышленного робота за счет возможности вращения детали вокруг своей оси при согнутой кисти.
Формула изобретения Запястье манипулятора, содержащее корпус, кисть, схват, приводной вгш и механизмы вращения и качения , отличающееся тем,
что, с целью упрощения конструкции, механизм вращения охвата выполнен в виде зубчато-реечной передачи, состоящей из двух цилиндрических зубчатых колес и рейки, причем одно
0 из зубчатых колес жестко связано со схватом, а другое закреплено на приводном валу, при этом рейка выполнена из двух частей, соединенных между собой с возможностью поворота относительно их общей продольнойоси.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР {1722756, кл. В 25 I 9/00, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1590370A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Манипулятор | 1981 |
|
SU971644A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Запястье манипулятора | 1987 |
|
SU1426779A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |
| Манипулятор | 1988 |
|
SU1521580A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
I
-Ио.о
0
NT
7-4
