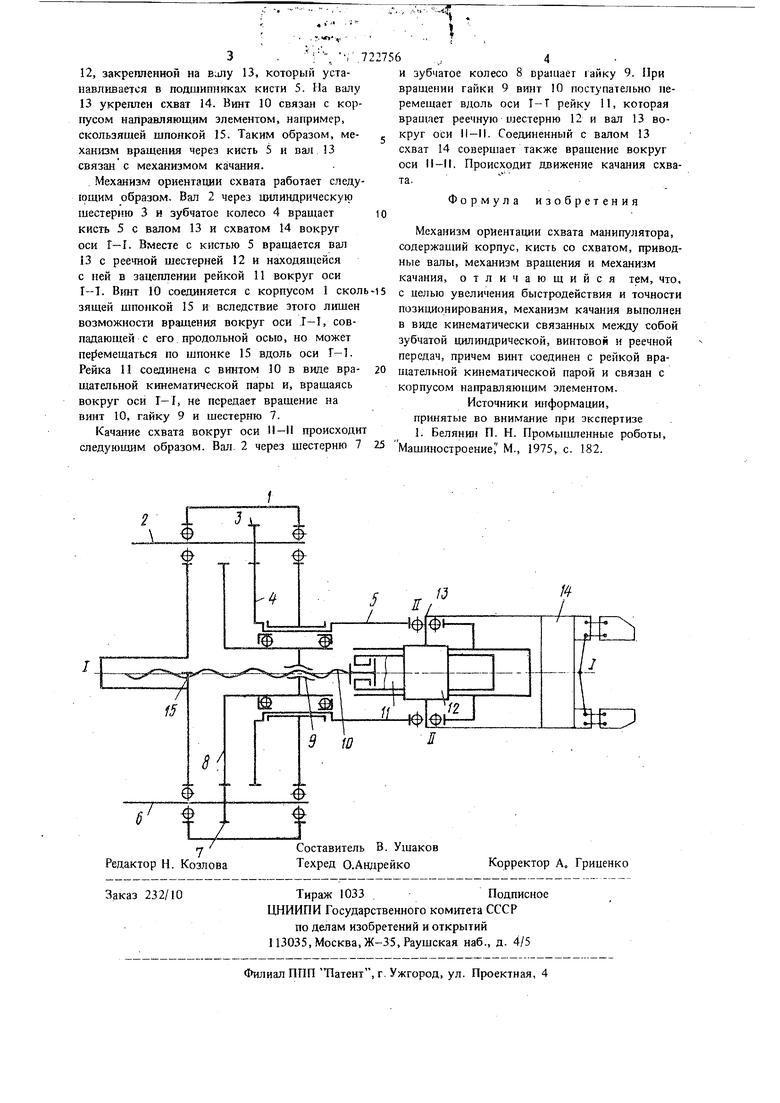
Изобретение относится к области машиностроения и может быть использовано в робото технических устройствах. Известен механизм ориентации схвата манипулятора, содержащий корпус, кисть со схватом, приводные валы, механизм вращения и механизм качания П. Недостатком известного устройства является то, что вращение и качание кисти кинематичес ки зависимы друг от друга. Это уменьщает быстродействие и снижает точность позиционир вания. С целью увеличения быстродействия и точности позиционирования механизм качания вы полнен в виде кинематически связанных межд собой зубчатой цилиндрической, винтовой и реечной передач, причем винт соединен с рейкой вращательной кинематической парой и связан с корпусом направляющим элементом. На чертеже показана кинематическая схема механизма ориентации схвата. Механизм ориентации включает в себя два механизма, механизм вращения и механизм качания, размещенные в корпусе 1. Механизм вращения состоит из приводного вала 2 и передаточного механизма, состоящего из цилиндрической шестерни 3, зубчатого колеса 4. На приводном валу 2 закреплена щестерня 3, которая находится в зацеплении с зубчатым колесом 4, закрепленным на кисти 5, Кисть 5 установлена в подщипнике корпуса 1. Механизм качания состоит из приводного вала 6 и передаточного механизма, состоящего из цилиндрической шестерни 7, зубчатого колеса 8, гайки 9, винта 10, рейки 11, реечной щестерни 12, вала 13. Приводной вал 6 установлен в подшипниках корпуса 1. На приводном валу 6 закреплена щестерня 7, находящаяся в зацеплении с зубчатым колесом 8. Ступица зубчатого колеса 8 установлена на подшипниках, внутри кисти 5 соосно с ее осью вращения Т-I. В ступице колеса 8 закреплена гайка 9, через которую проходит винт 10. Рейка 11 установлена в кисти 5, относительно которой может поступательно перемещаться. Винт 10 соединяется с рейкой 11 в виде вращательной кинематической пары. Рейка 11 находится в зацеплении с реечной шестерней
12, закрепленной на валу 13, который устанавл1шается в подшипниках кисти 5. На валу 13 укреплен схват 14. Винт 10 связан с корпусом направляющим элементом, например, скользящей шпонкой 15. Таким образом, механнзм вращения через кисть 5 и вал 13 связан с механизмом качания.
Механизм ориентации схвата работает следующим образом. Вал 2 через цилиндрическую шестерню 3 и зубчатое колесо 4 вращает
кисть 5 с валом 13 и схватом 14 вокруг оси Г-1. Вместе с кистью 5 вращается вал i3 с реечной шестерней 12 и находящейся с ней в зацеплении рейкой 11 вокруг оси Г--Т. Винт 10 соединяется с корпусом 1 скол зящей шпонкой 15 и вследствие этого лишен возможности вращения вокруг оси 1-1, совпадающей с его продольной осью, но может перемещаться по шпонке 15 вдоль оси Г-1. Рейка 11 соединена с винтом 10 в виде вращательной кинематической пары и, вращаясь вокруг оси 1-1, не передает вращение на винт 10, гайку 9 и шестерню 7.
Качание схвата вокруг оси И-И происходит следующим образом. Вал. 2 через шестерню 7
и зубчатое колесо 8 вращаег гайку 9. При вращении гайки 9 amiT 10 поступательно неремещает вдоль оси I-Т рейку 11, которая вращает реечную шестерню 12 и вал 13 вокруг оси 11-11. Соединенный с валом 13 схват 14 совершает также вращение вокруг оси 11-11. Происходит движение качания схвата.
Формула изобретения
Механизм ориентации схвата манипулятора, содержащий корпус, кисть со схватом, приводные валы, механизм вращения и механизм качания, отличающийся тем, что, с целью увеличения быстродействия и точности позиционирования, механизм качания выполнен в виде кинематически связанных между собой зубчатой цилиндрической, винтовой и реечной передач, причем винт соединен с рейкой вращательной кинематической парой и связан с корпусом направляющим элементом.
Источники информации, принятые во внимание при экспертизе 1. Белянин П. Н. Промыщленные роботы, Мащиностроение М., 1975, с. 182.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |
| Запястье манипулятора | 1981 |
|
SU952577A1 |
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| Привод ориентации схвата манипулятора | 1988 |
|
SU1593952A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| ПОЛУАВТОМАТ ДЛЯ ПОКРЫТИЯ СФЕРИЧЕСКИХ КАТОДОВ | 1965 |
|
SU173566A1 |
