(Л
кэ
О5
«
СО
11
Изобретение относится к робототехнике и может быть использовано при разработке манипуляторов для автоматизации производства.
Цель изобретения - повьпиение точности позиционирования за счет обеспечения кинематической жесткости.
На фиг.1 изображено запястье манипулятора; на фиг.2 - то же, вид спереди (совмещенный разрезом Б-Б); ;На фиг.З разрез А-А на фиг.2; на - узел I на фиг.З.
Запястье содержит корпус 1, кисть 2, охват 3, приводной вал А вращения, приводной вал 5 качания, ведущее, колесо 6, цилиндрические колеса 7, червячные валы 8, червячные колеса 9, вал 10.
Ведомые цилиндрические колеса 7, входящие в зацепление с приводным колесом 6, а также червячные валы 8 и колеса 9 образуют два дублирующих редуктора, червячные валы которых
установленные на червячных валах 8 редукторов, входящих в зацепление с колесами 9, установленными на валу . 10, поворачивают схват 3, находящий ся на том же валу, на заданный угол.
При повороте вала 4, поворачивают корпус 1 запястья с кистью 2 и схва- том 3.
Формула изобретения
Запястье манипулятора, содержащее поворотный корпус, приводные валы, схват и механизмы вращения и качания схвата, отличающееся тем, что, с целью повьпиения точности позиционирования за счет обеспечения кинематической жесткости, механизм качания схвата выполнен в виде двух последовательно соединенных редукторов, расположенных в поворотном корпусе, первый из которых представляет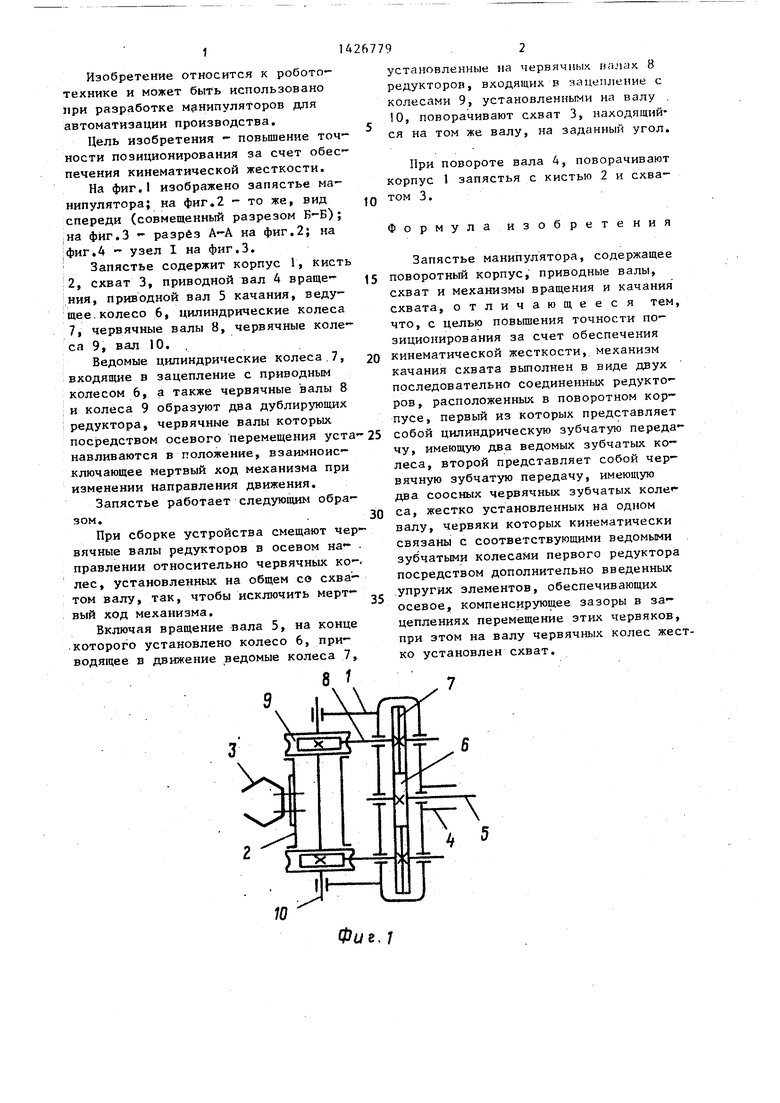
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ СХВАТА ДЕТСКОГО ОДНОСХВАТОВОГО БИОЭЛЕКТРИЧЕСКОГО ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2719658C1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Захватное устройство манипулятора | 2018 |
|
RU2700348C1 |
| Привод ориентации схвата манипулятора | 1988 |
|
SU1593952A1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
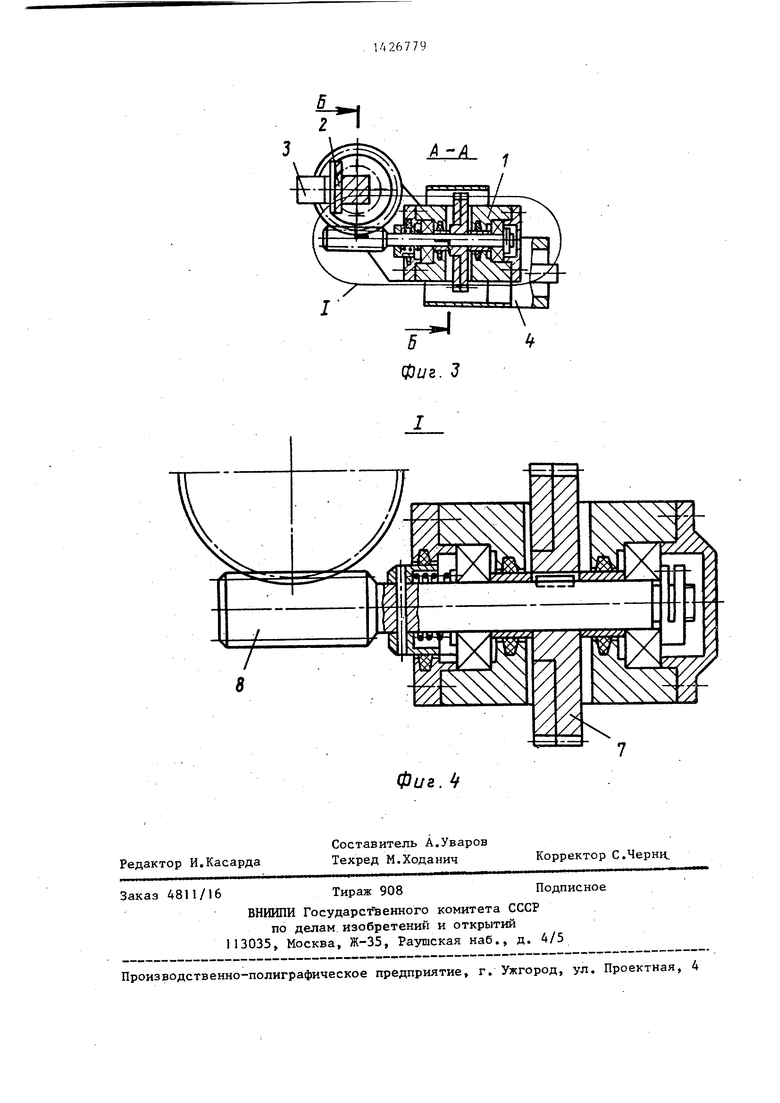
Изобретение относится к робототехнике и может быть использовано при разработке манипуляторов для автоматизации производства. Целью изобретения является повышение точности позиционирования за счет обесг печения кинематической жесткости. При вращении вала 5 и колеса 6, установленного на нем, движение через ведомые цилиндрические зубчатые колеса 7 передается на соосные червяки 8, далее - на червячные зубчатые колеса 9, установленные на одном валу качания схвата. Для обеспечения кинематической жесткости устройства предусмотрена возможность осевого перемещения червяков 8 вдоль оси ведомых цилиндрических зубчатых колес 7. 4 ил.
посредством осевого перемещения уста- 25 собой цилиндрическую зубчатую переданавливаются в положение, взаимноис- ключающее мертвый ход механизма при изменении направления движения.
Запястье работает следующим образом.
При сборке устройства смещают чер вячные валы редукторов в осевом на- . правлении относительно червячных ко-. лес, установленных на общем со схва- том валу, так, чтобы исключить мертвый ход механизма.
Включая вращение вала 5, на конце которого установлено колесо 6, приводящее в движение ведомые колеса 7,
Фи&. г
0
5
чу, имеющую два ведомых зубчатых колеса, второй представляет собой червячную зубчатую передачу, имеющую два соосных червячных зубчатых са, жестко установленных на одном валу, червяки которых кинематически связаны с соответствующими ведомыми зубчатыми колесами первого редуктора посредством дополнительно введенных .упругих элементов, обеспечивающих осевое, компенсирующее зазоры в зацеплениях перемещение этих червяков, при этом на валу червячных колес жестко установлен схват.
т .в
Г
| Запястье манипулятора | 1981 |
|
SU952577A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
