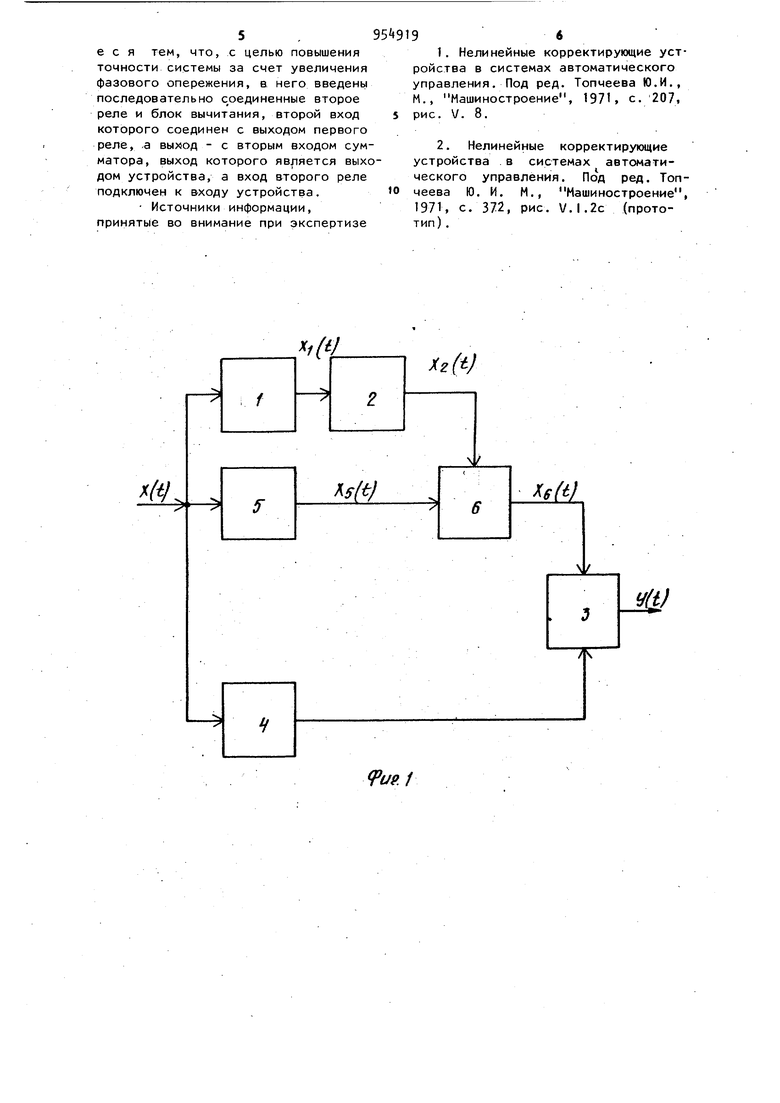
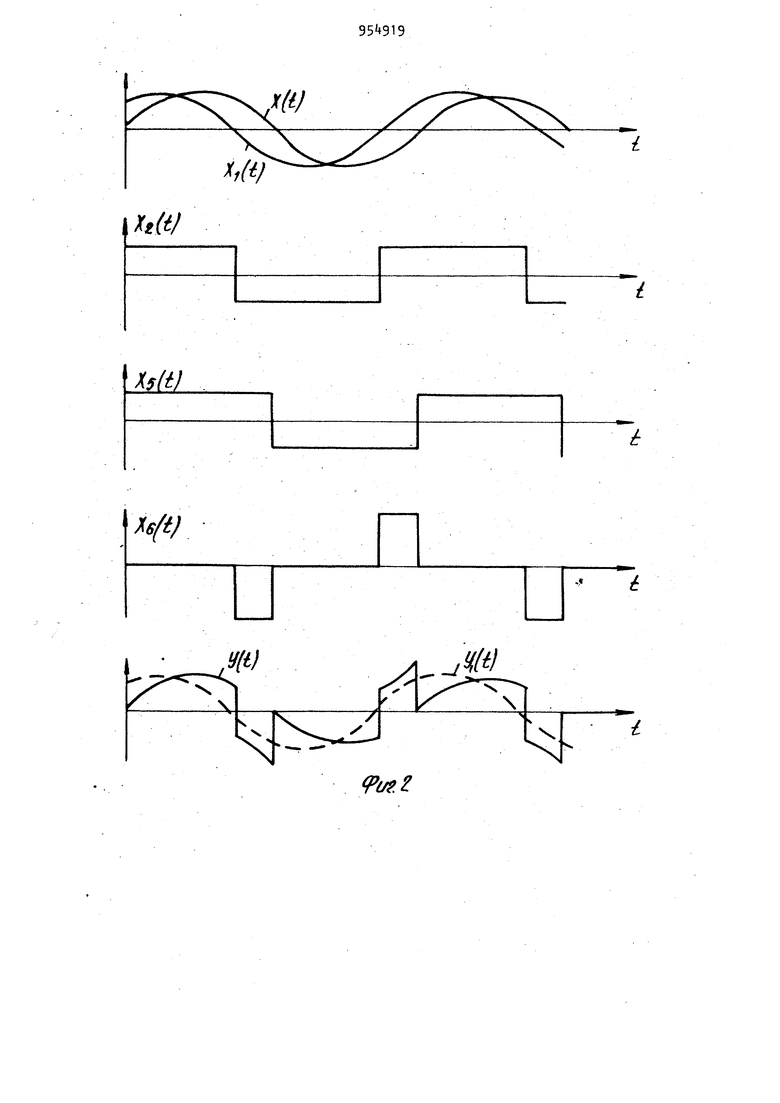
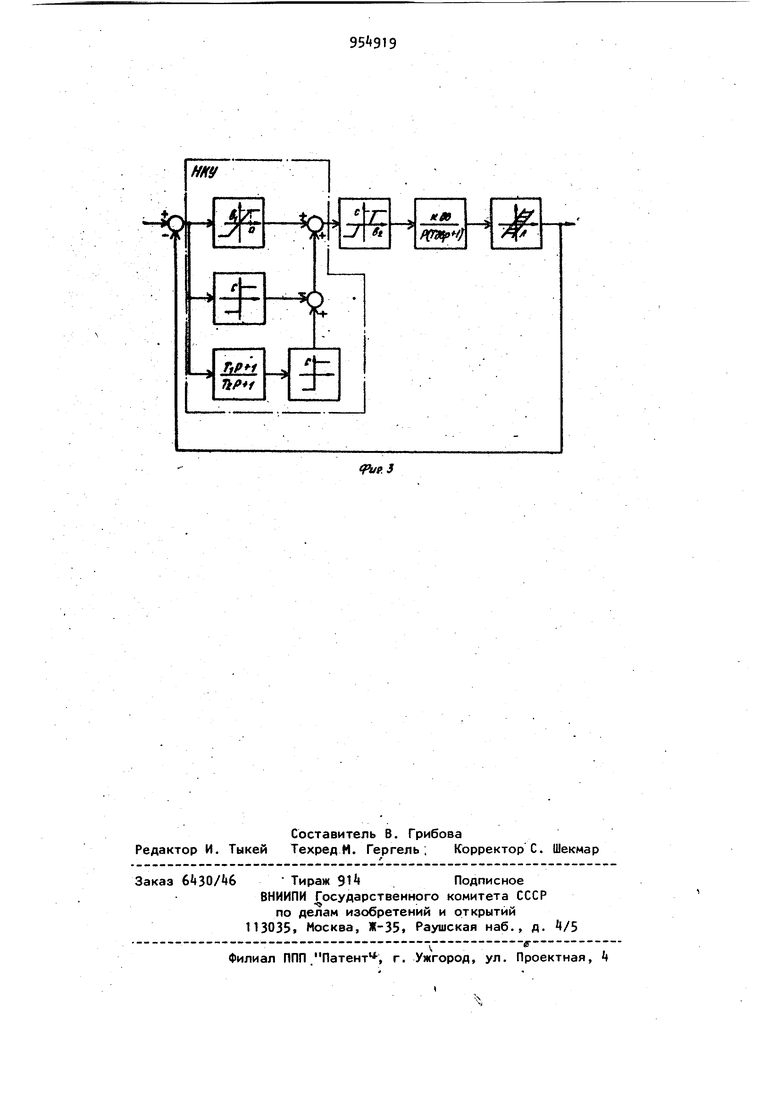
395 соединенные второе реле и блок вычита ния, второй вход которого соединен с выходом первого реле, а выход - с вторым входом сумматора, выход которо го является выходом устройства, а вход второго реле подключен к входу устройства. На фиг. 1 представлена.структурная схема предлагаемого устройства; на фиг, 2 - временные диаграммы, поясняющие принцип работы устройства; на фиг. 3 структурная схема следящей системы с нелинейным корректирующим устройством, Устройство содержит фильтр 1,.реле 2, сумматор 3. усилитель k, реле 5 и блок 6 вычитания. При этом выходы пер вого реле 2 и второго реле 5 подключены соответственно к первому и второ му входам блока 6 вычитания, выход которого соединен с вторым входом сум матора 3. Вход второго реле 5 подключен непосредственно к входу усилителя . На временных диаграммах (фиг. 2), иллюстрирующих работу предлагаемого устройства, обозначены входной сигна X(t); выходной сигнал X(t) фильтра выходные сигналы X2(t), Xj(t) первого 2 и второго реле 5; импульсный корректирующий сигнал X(t) (фыходной сигнал блока вьтитания 6) ; выходной сигнал Y(t), Y(t) устройства и его первая гармоника. Устройство работает следующим образом. Входной сигнал X(t) и опережающий его по фазе сигнал X(t) с выхода фильтра 1 через второе реле 5 и первое реле 2 соответственно поступают на входы блока 6 вычитания. На выходе блока 6 вычитания формируется импульсный корректирующий сигнал ) В сумматоре 3 к нему добавляется уси ленный в усилителе k входной сигнал X(t). Как видно из временных диаграм первая гармоника Yj|(t) выходного сиг йала устройства значительно опережает по фазе входной сигнал. При этом амплитуда первой гармоники выходного сигнала незначительно превышает ампл туду входного сигнала. Большое фазовое опережение, получаемое в нелинейном корректирующем устройстве при незначительном росте амплитуды, позволяет повысить точность системы,автоматического управления, в которой используется устройство. .4 Положительный эффект от использования предлагаемого технического решения в отличие от прототипа заключается в повышении точности системы автоматического управления за счет увеличения фазового опережения. В качестве примера конкретного исполнения можно привести нелинейное корректирующее устройство для коррекции следящей системы постоянного тока, в состав которой входят последовательно соединенные измеритель рассогласования, нелинейное корректирующее устройство, усилитель мощности, двигатель постоянного тока ДПР-32 и редуктор. Нелинейное корректирующее устройство (НКУ) содержит два электронных реле, усилитель, пассивный РС-фильтр, а также блок вычитания и сумматор, выполненные на операционных усилите-. лях. Параметры системы следующие (фиг. 3): зона нелинейности усилителя а 0,2 уровень насыщения усилителя . 4; зона нечувствительности двигателя Ьл 2Ь ; уровень насыщения усилителя мощности с .15Ь ; коэффициент передачи двигателя с редуктором Кдц 6,1 ; постоянная времени двигателя 0,02 с; люфт в редукторе л- 0,3°; постоянные времени фильтра Tt| 0,0 с, Т 0,005 с. Макетирование этой системы показало, что максимальная ошибка при гармоническом входном сигнале с амплитудой а 10° и частотой Ы 25 с ; 9тох 30 При использовании в той же системе известного НКУ критическая доброт ность падает с 650 до 300 с , а максимальная ошибка при том же входном сигнале возрастаетдо 60. Таким образом, предлагаемое нелинейное корректирующее устройство позволяет увеличить точность системы в 2 раза. Формула изобретения Нелинейное корректирующее устройство, содержащее последовательно соединенные фильтр и первое реле и последовательно соединенные усилитель и сумматор, причем входы усилителя и фильтра объединены и являются входом устройства, отличают е5 , е с я тем, что, с целью повышения точности системы за счет увеличения фазового опережения, в него введены последовательно соединенные второе реле и блок вычитания, второй вход которого соединен с выходом первого реле, -а выход - с вторым входом сумматора, выход которого является выхо дом устройства, а вход второго реле подключен к входу устройства. Источники информации, принятые во внимание при экспертизе 3 1. Нелинейные корректирующие устройства в системах автоматического управления. Под ред. Топчеева Ю.И., М., Машиностроение, 1971, с. 207, рис. V. 8. 2. Нелинейные корректирующие устройства в системах автоматического управления. Псэд ред. Топчеева Ю. И. М., Машиностроение, 1971, с. 372, рис. V.I.2C (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1982 |
|
SU1023275A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2019 |
|
RU2734153C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2012029C1 |
| Псевдолинейное корректирующее устройство | 1978 |
|
SU750422A1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1638706A1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU703772A1 |
| Нелинейное корректирующее устройство | 1977 |
|
SU734605A1 |
| Следящая система | 1978 |
|
SU746406A1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
Xf{f/
м
J(,fiJ
б()
y(i)
. J
UP.I
Mtl
f/.l
