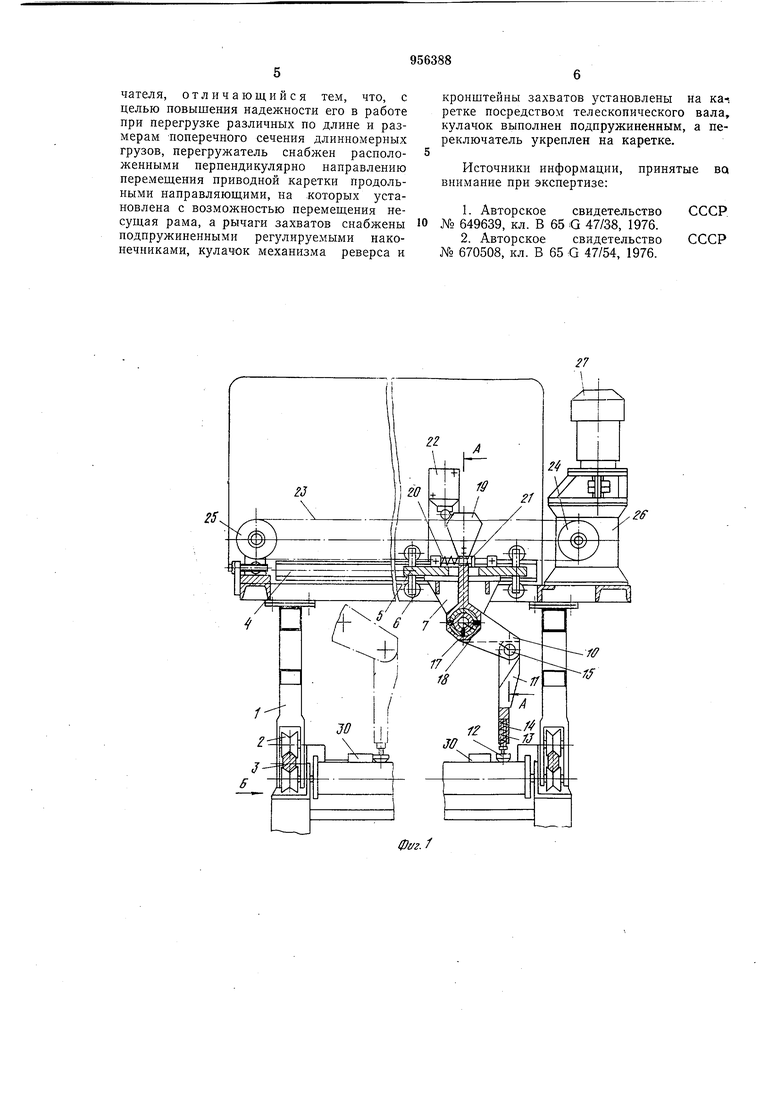
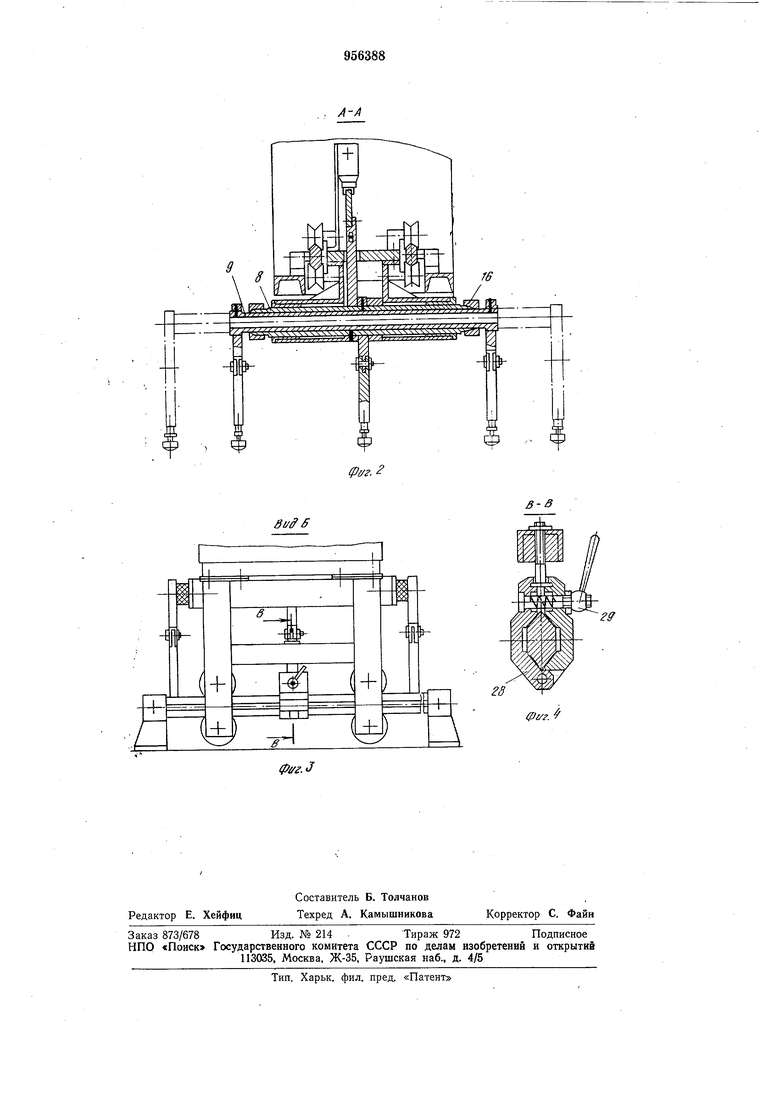
щающихся частей 9. На телескопическом валу установлены три захвата, состоящие из кронштейна 10, рычага 11, наконечника 12, штока 13 и пружины 14. Кронштейн 10 и рычаг 11 соединены между собой посредством оси 15. Подвижные части телескопического вала 9 относительно стационарной части 8 фиксируют в осевом направлении цанговыми зажимами с накидными гайками 16, а для предотвращения взаимного проворота служат шпонки 17. На телескопическом валу закреплен рычаг 18 привода кулачка реверса 19, который проходит через окно в корпусе каретки. Кулачок реверса 19 укреплен на рычаге 18, а сам рычаг 18 пружиной 20 прижат к жесткому упору 21 на корпусе каретки. На каретке над кулачком реверса установлен путевой переключатель 22. К торцам каретки крепится приводная цепь 23, которая через приводную 24 и натяжную 25 звездочки связана с редуктором 26 и электродвигателем привода 27. По концам рамы установлены переключатели конечных положений каретки (не показаны).
Между опорами стоек рамы 1 расположены тормоза 28, состоящие из двух колодок с фрикционными накладками.
Для управления тормозами служат рукоятки 29.
Перегружатель работает следующим образом.
В зависимости от длины подлежащего перемещению груза (доски), рама 1 по продольным направляющим 3 передвигается в такое положение, чтобы ось среднего захвата примерно совпадала с серединой доски, и фиксируется в таком положении тормозами 28 при помощи рукояток 29. Затем .крайние захваты раздвигаются на необходимую величину так, чтобы они находились возможно ближе к торцам и перемещаемого груза и при помощи цанговых зажимов посредством накидных гаек 16 фиксируются в таком положении.
При поступлении сигнала на перемещение груза 30 включается электродвигатель привода 27, каретка 5 начинает двигаться, захваты -своими наконечникамл 12 захватывают перемещаемый груз и передвигают его по направлению движения жаретки. В момент соприкосновения захватов с перемещаемым грузом удар амортизируется пружиной 20, которая несколько сжимается рычагом 18 вследствие небольшого поворота захватов относительно оси телескопического вала. По достижении перемещаемым грузом жесткого упора захваты начинают поворачиваться относительно оси телескопического вала и через рычаг 18, сжимая пружину 20, кулачкол реверса 19 включается путевой переключатель 22, который подает .команду на реверс каретки. При этом пружина 20 разжимается, стремясь повернуть захваты в исходное положение. Если перемещаемый груз имел небольшую высоту, то в момент реверса вследствие поворота захватов, возможны, наезд последних на перемещаемый груз и, следовательно, защемление перемещаемого груза захватами. Для предотвращения этого захваты выполнены в виде кронщтейна 10 и рычага 11, соеди(ненных щарнирно таким образом, что рычаг 11 относительно кронштейна 10 может поворачиваться по часовой стрелке вокруг оси 15, а наконечник 12 через шток 13, сжимая слабую пружину 14, компенсирует изменение расстояния между кареткой и торцом наконечника 12.
Каретка возвращается в исходное положение, привод выключается.
Если к моменту следующего рабочегр хода ранее перемещенный груз убран, то процесс перегрузки полностью повторяется. В противном случае роль жесткого упора играет ранее перемешенный груз и следующий перемещаемый груз укладывается рядом с лежащим. Таким образом может быть уложен слой длинномерных грузов в пределах всего рабочего хода каретки.
Вследствие того, что захваты закреплены на каретке, а каретка перемещается над зоной перемещения груза, величина изгибающего момента от силы сопротивления передвижению груза не зависит от пути передвижения.
Наличие раздвигающихся захватов и возможность установочных перемещений несущей рамы перегружателя позволяет в каледом конкретном случае в зависимости от длины перемещаемого груза выбрать наивыгоднейшее положение захватов и зоны их контактов с перемещаемым грузом.
Возможность регулировки захватов по высотеблагодаря наличию резьбового соединения между наконечником и щтоком позволяющим свести к минимуму зазор между опорной поверхностью, по которой перемещается груз, и торцом наконечника, обеспечивая максимально возможную зону контакта по высоте между захватом и перегружаемым грузом, что весьма важно при перегрузке небольших по высоте грузов.
Изобретение обеспечивает надежную перегрузку различных по длине и размерам, поперечного сечения длинномерных грузов, что повыщает эффективность устройства.
Формула изобретения
Перегрулсатель, включающий несущую раму с поперечными направляющими, на которых размещена приводная каретка с захватами, .каждый из которых выполнен в виде щарнирно соединенных между собой кронщтейна, установленного на каретке, к рычага, и механизм реверса в виде кулачка, укрепленного на каретке, и переключателя, отличающийся тем, что, с целью повышения надежности его в работе при перегрузке различных по длине и размерам поперечного сечения длинномерных грузов, перегружатель снабжен расположенными перпендикулярно направлению перемещения приводной каретки продольными направляющими, на которых установлена с возможностью перемещения несущая рама, а рычаги захватов снабжены подпружиненными регулируемыми наконечниками, кулачок механизма реверса и
кронштейны захватов установлены на ка- ретке посредством телескопического вала, кулачок выполнен подпружиненным, а переключатель укреплен на каретке.
Источники информации,
принятые во внимание при экспертизе:
1.Авторское свидетельство СССР 10 № 649639, кл. В 65 G 47/38, 1976.
2.Авторское свидетельство СССР № 670508, кл. В 65 G 47/54, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегружатель | 1982 |
|
SU1033407A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Грузовая тележка для подвесной монорельсовой дороги | 1975 |
|
SU610705A1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| УСТАНОВКА ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ | 1971 |
|
SU290651A1 |
| Система питания артиллерийского автомата боеприпасами | 2015 |
|
RU2618309C2 |
| Устройство для подачи длинномерного материала к обрабатывающей машине | 1979 |
|
SU871933A1 |
| Стенд для исследования воздействия срезающего аппарата капустоуборочных машин на растение | 1981 |
|
SU1006959A1 |
| Устройство для подачи длинномерного материала в рабочую зону пресса | 1987 |
|
SU1503948A1 |
Г6
Ф
ei/ff S
ф1/г/
