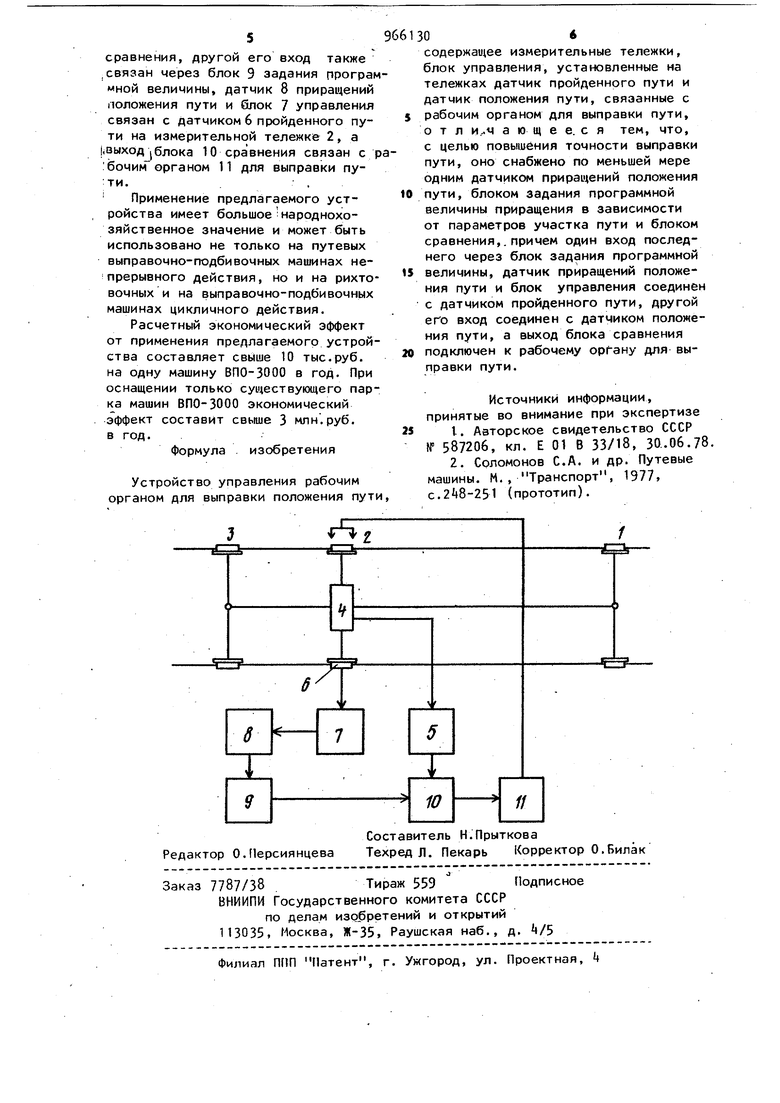
. 1 . Изобретение относится к механизации и автоматизации трудоемких работ по ремонту и текуи{ему содержанию желе 1нодорожного пути. Известно устройство управления ра бочим органом для выправки положения пути, содержащее измерители стре изгиба путй в плане в зоне выправки и на неотрихтованном пути, следящую каретку, программную каретку, связанную с кулисой, датчик скорости движения, датчик поворота кулисы, множительный блок и механизм сдвига пути 1. ... Известно также устройство управ|Ления рабочим органом для выправки положения пути, содержащее измерительные тележки, блок управления, установленные на тележках датчик пройденного пути и датчик положений пути, связанные с рабочим органом для выправки пути 2. Недостатком этих устройств является то, что формирование .програм,мы для управления исполнительным органом механизма сдвига осуществляется на основании инфсэрмации, получаемой от измерителя стрел в зоне рих.товки и от измерителя стрел на впереди лежащем неотрихтованном пути. В этом случае на формируемую программу для выправочно-подбивочной машины, например ВПО-3000, оказывает существенное влияние срстояние пути, полученное после работы впереди идущих Путевых машин технологической цепочки-планировщика, путеукладчика, щебнёочиститёльной и др. Вместе с тем статистический анализ состояния пути после работы указанных машин показывает, что его состояние существенно отличается от требуемого. Так, например, имеются отступления в точках начала и конца переходной кривой, имеются длинные заводины отклонения от оси пути на большой его длине. При использовании указанных устройств положение пути не приближается к требуемому, а наоборот, еще в большей степени отличается от требуемого. Учитывая, что существующими технологическими процессами предусмотрена выправка пути с подбивкой машинами ВПО-ЗООО 2-3 раза, применение этих устройст может привести к существенному зарихтовыванию кривых. Эти выводы подтверждаются теоретическими исследованиями и натуральными испытаниями указанного устройства на машине ВПО-ЗООО, которые показыва|6т, что при разовом проходе машины наблюдает ется смещение начала и конца переходной кривой на 20-30 м. ЦельнР изобретения является повышение точности выправки пути. Эта цель достигается тем, что уст ройство снабжено по меньшей мере одним датчиком приращений положения пути, блоком-задания программной величины приращения в зависимости от параметров участка пути и блоком , сравнения, причем один вход последне го через блок задания программной величины, датчик приращений положени пути и блок управления соединен с датчиком пройденного пути, другой его вход соединен с датчиком положения пути, а выход блока сравнения подключен к рабочему органу для выправки пути. На чертеже изображена принципиаль ная схема устройства управления рабочим органом для выправки положения пути, в плане. Устройство содержит по меньшей ме ре три измерительные тележки 1,2 и 3. На одной из измерительных тележек например на тележке 2, закреплен измерительный механизм k, связанный с датчиком 5 положения пути, в данном случае с датчиком стрел из,гиба пути. Датчик 6 пройденного пути смонтирован,, например, на измеритель ной тележке 2 и связан через блок 7 управления с датчиком § приращений положения пути,который через блок 9 задания программной величины связан с одним из.входов блока 10 сравнения другой вход которого связан с выходом датчика 5 положения пути, а выход блока 10 сравнения соединен с рабочим органом 11 для выправки пути. Для обеспечения работы устройства например, на переходной кривой, необходимо до начала переходной кривой при помощи блока 9задания программной вел ичины установить величину требуемого приращения стрелы изгиба определяемую радиусом круговой кривой и длиной ее переходной, а в начале переходной кривой посредством блока 7 управления включить связь между атчиком 6 пройденного пути и датчиком 8 приращений, а также знак прираений в зависимости от того . левая правая или правая кривая. Во время движения измерительных ележек 1,2 и 3 совместно с путевой хашиной (на чертеже не показана от датчика 6 пройденного пути поступают сигналы через определенные, короткие по длине пути отрезки, например через 0,25 м в блок 7 управления, которые соответствующим образом накапливаются в датчике 8 приращений. Результат накапливаемой суммы в датчике 8 приращений, преобразованный с помощью блока 9 задания программной величины в требуемую в соответствии с заданными параметрами кривой (радиусом и длиной ее переходной), непрерывно сравнивается в блоке 10 сравнения с сигналами, поступающими от датчика 5 положения пути, закрепленного на измерительном механизме k. В результате сравнения этих сигналов в блоке 10 сравнения вырабатывается соответствующая команда рабочему органу 11 для выправки пути, который осуществляет сдвиг пути на необходимую величину. Таким образом, осуществляется автоматическое управление выправкой положения пути в плане на всей длине- переходной кривой. В конце переходной кривой необходимо отключить имеющуюся связь между датчиком 6 пройденного пути и датчиком 8 приращений положения пути. Датчик 5 положения пути, датчик 8приращений положения пути, блок 9задания программной величины могут быть выполнены в виде однотипных, унифицированных элементов, например, потенциометров, вращающихся трансформаторов, сельсинов и др. В устройстве управления выправкой положения пути по уровню вместо датчика стрел изгиба пути в плане используется датчик измерения положения пути по уровню, например физический маятник, выход которого связан с одним из входов б/|ока 10
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| Система и способ для определения пространственного положения и выправки железнодорожного пути, устройство лазерного измерения системы сбора данных о фактическом положении пути | 2023 |
|
RU2808852C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| Устройство управления исполнительным органом машины для выправки пути | 1979 |
|
SU863744A1 |
