(54) УСТРОЙСТВО ВЗАИМОСВЯЗАННОГО УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ ПОДЪЕМА И ТЯГИ
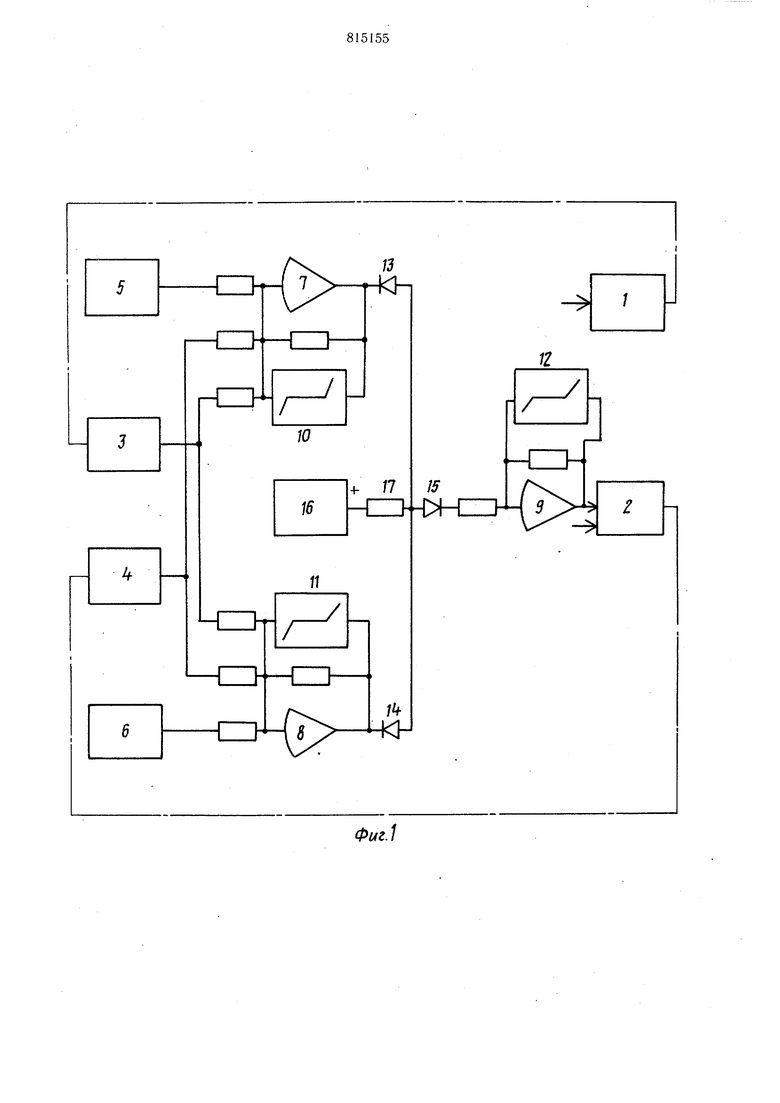
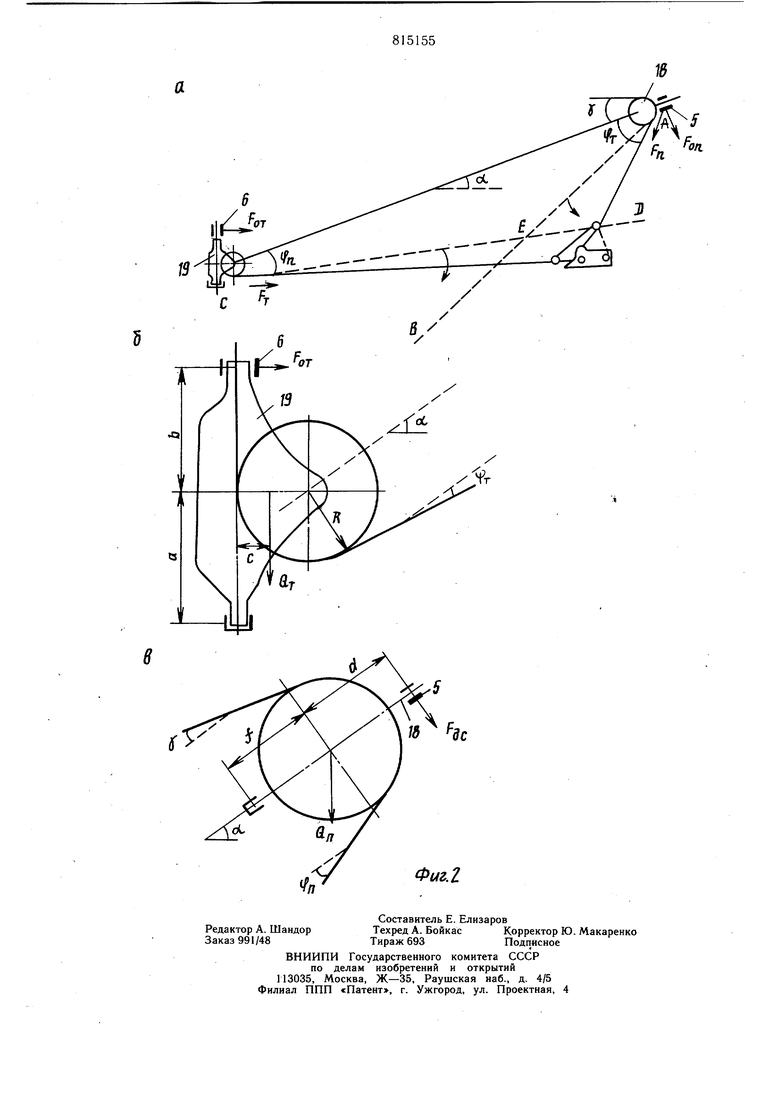
ЭКСКАВАТОРА-ДРАГЛАЙНА положительному зажиму источника опорного напряжения, катод третьего диода подключен ко входу третьего операционного усилителя, выход которого соединен с электроприводом тягн. На фиг. изображена функциональная схема устройства; на фиг. 2 - схемы расположения датчиков усилий в опорах подшипников узлов направляющих и головных блоков. Устройство взаимосвязанного управления электроприводами 1 подъема и 2 тяги содержит два датчика скорости приводов 3 подъема и 4 тяги, два датчика 5 усилия в опорах подшипников узла головных блоков и узла направляющих блоков, три операционных усилителя 7, 8 и 9 с блоками 10, 11 и 12 ограничения в цепях их обратных связей, три диода 13, 14 и 15 источник 16 опорного напряжения и резистор 17. Датчики 5 и б усилий установлены на опорах ПОДП1ИПНИКОВ соответственно узла 18 головных блоков и узла 19 направляющих блоков, причем выход датчика 5 усилия в опоре подшипников узла головных блоков подключен ко входу первого операционного усилителя 7, а выход датчика 6 усилия в опоре поди1иг1ников узла нагфавляющих блоков подключен ко входу второго операционного усилителя 8. Выход датчиков скорости приводов 3 подъема и 4 тяги подключены ко входам операционных усилителей 7 и 8, выходы ы которых подключены к и второго диодов, аноды катодам нервого которых вместе с анодом третьего д,иода соединены в общую точку и через резистор подключены к юложительному зажиму источника опорного напряжения, катод третьего диода подключен ко входу третьего операциоиного усилителя, выход которого соедипен с электроприводом тяги. Катод третьего диода 15 подключен ко входу третьего операционного усилителя 9, выход которого соединен с управляюц 1.им входом привода 2 тяги. Устройство работает следующим обраНа вход устройства подаются сигналы с четырех датчиков. Сигналы датчиков скоростей 3 и 4 приводов подъема и тяги пропорциоиальны скоростям этих приводов. Сигналы датчиков 5 и 6 усилий в опорах подшипников содержат информацию о. положении ковща и о его загрузке. Усилие в опоре подшипников головных блоков измеряется датчиком 5 и при его установке в соответствии с рисунком (фиг. 2) определяется зависимостью г df усилие в опоре подшипников направляющих блоков измеряется датчиком 6 и при го установке в соответствии с рисунком (фиг. 2) определяется зависимостью V . -, Vn-aTglf (-% м5Т1 гдеРп Р. - усилия в канатах подъема итя-узлы между осью стрелы и направлением канатов подъема и тяги; -угол наклона стрелы к плоскости горизонта; -угол между осью стрелы и верхней ветвью подъемного каната; a,8,c.d,t -линейные размеры блоков наводки и следящих блоков (фиг.2). , rj .ICAllMnA VJ. Ц}Ш . Цсицц -весследящих блоков наводки. Постоянные составляющие показаний датчиков 5 и 6, определяемые весом узлов головных и направляющих блоков Q и Q, могут быть учтены при определении положения линией АВ и CD (фиг. 2) или скомиенсированы соответствующей установкой датчиков. В случае их. компенсации усилие с. принимает нулевое значение при f;, jf , т.е. при положении ковща на линии АВ (фиг. 2). Аналогично усилие Fn.n. .,..™.« равно нулю при fT-« -earct 5 т. е. на линии CD (фиг. 2). В зоне BED оба указанные усилия положительны; в зоне СЕВ F,c.0, а в зоне AED 1ъ.с., а го. в зоне АЕС Ед.е.0 .0. в зоне BED, если ковщ не движется но направлению к стреле, то есть алгебраическая сумма скоростей приводов подъема и тяги, получаемая на первом и втором усилителях 7 и 8 по сигналам датчиков 4 и 3 скоростей приводов равна О, а Ел.с. и FO,H. положительны, то первый и второй диоды 13 и 14 открыты, так как потенциалы их анодов положительны. В то же время потенциал анода третьего диода 15 отрицателен и он заперт, а значит управляющий сигнал на вход привода 2 -тяги от устройства не поступает и устройство не вмещивается в работу привода. В зоне АЕ второй диод 14 запирается положительным потенциалом, появляющимся на выходе второго операционного усилителя 8, так как Е.н.0, однако первый диод 13 остается открытым, что не допускает подачу сигнала на вход привода 2 тяги. Аналогично устройство действует в зоне СЕВ с той лишь разницей, что занирается первый диод 13, а открытым остается второй диод 14. При переходе ковша в зону оба диода 13 и 14 оказываются запертыми, так и р9.. а следовательно на выходах первого и второго операционноUQ Dt-rvr nov ПОПОГ Г П IJ 1ЭТГЧП/-ЧПГ а г о (t 11Л11 т т го усилителя 7 и 8 положительные сигналы. Углубление ковша в зону АЕС приводит к росту положительного потенциала на аноде третьего диода 15, который открывается и пропускает управляющий сигнал на третий операционный усилитель 9, выходной сигнал которого поступает на управляющий вход привода 2 тяги, вызывая изменение скорости тягового каната и выход ковща на линию ЛЕС. Причем управляющим сигналом для привода 2 тяги служит меньший по,абсолютной величине из двух выходных сигналов первого и второго операционного усилителей 7 и 8, т.е. выще линии АЕ управляющим является усилитель 7, а выще линии СЕ - усилитель 8. В том случае,.когда алгебраическая сумма скоростей приводов подъема и тяги отлична от О, происходит коррекция положения линий АВ и СД, улучщая работу устройства в динамике. Так, приположительной величине суммы скоростей приводов подъема и тяги линии АВ и СД удаляются от стрелы на расстояние пропорциональное величине этой суммы, т. е. чем быстрее ковщ приближается к стреле, тем дальще от стрелы срабатывает защита. При отрицательной у величине суммы скоростей и нахождения ковша в зоне АЕС сигналы, поступающие с датчиков скоростей 3 и 4, способствуют плавному выходу ковща на границу этой зоны. Из сказанного следует, что действие устройства заключается в предотвращении опасного приближения ковша, к стреле с последующим его выводом на траекторию, транспортировки, близкую к ломаной линии АЕС. Таким образом предлагаемое устройство повышает маневренность, т. е. качество управления экскаваторами, благодаря управлению приводом тяги в функции усилий в опорах подшипников узлов направляющих и головны-х блоков, а также алгебраической суммы скоростей приводов подъема и тяги, контролю знаков усилий в опорах и формированию сигнала управления только при отрицательных сигналах обоих датчиков усилий, причем пропорционально NjenbuiOMy из них по абсолютной величине. Кроме этого существующие датчики усилий обладают высокой надежностью и долговечностью и не требуют больших усилий при их o6c.iyживании, что собственно важно в тяжелых условиях эксплуатации экскаваторов. Формула изобретения Устройство взаимосвязанного управления электропривода.ми подъема и тяги экскаватора-драглайна, содержащее два датчика усилия, один нз которых устаьовмрн в направляющих блоках, отличающееся; тем, что, с целью повышения качества управления экскаватором, оно снабжено датчиками скоростей приводов подъема и тяги, тремя операционными сил 1теля л11 с блоками ограничения в цепях их обраг;,:-:х связей, источником опорного напряжеи,ия. а один из датчиков VCHJIMH устаков. з головных блоках, причем выход датч.ик,; усилия в головных блоках подключен ко входу первого операционного усилителя, выход датчика усилия в направляющих блоках подключен ко входу второго операцнонного усилителя, выходы датчиков скорости приводов подъема и тяги подключены одновременно ко входам первого и второго операционных усилителей, выходы которых подключены к катодам первого и второго диодов, аноды которы.х вместе с анодом третьего диода соединены в общую точку и через резистор подключены к положительному зажиму источника опорного напряжения, катод третьего диода подключен ко входу третьего операционного усилителя, выход которого соединен с .электроприводом тяги. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 537168, кл. Е 02 F 3/18, 1976 2.Авторское свидетельство СССР по заявке № 2538062/03, кл. Е 02 F 3/48. 1977.
Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Электронный блок управления приводом швейных и оверлочных машин | 1984 |
|
SU1498397A3 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| Способ взаимного регулирования электроприводами подъема и тяги экскаватора-драглайна | 1977 |
|
SU736323A1 |