1
Изобретение относится к подъемно транспортному машиностроению, а именно к подвескам груза.
Известна подвеска груза, снабженная механизмом подъема, состоящая из привода и барабана ГОРаскачивание груза на канате известной подвески устраняется поднятием-опусканием каната, что влечет за собой потерю производительности и создает определенную опасность работ в, рабочей зоне.
Наиболее близким к изобретению является подвеска груза, содержащая грузовой канат с грузозахватным устройством и механизм подъема груза с барабаном 12.
Недостатком известной подвески яв-. ляется низкая эффективность работы .подвески.
Цель изобретения - повышение эффективности работы подвески за счет обеспечения изменения жесткости под
зеса в зависимости от массы поднимагмого груза.
Указанная цель достигается тем, что подаеска груза, содержащая груг зовой канат с грузозахватным устройством и механизм подъема груза с барабаном, снабжена упорной шайбой, зажимным приспособлением, жестко установленным на механизме подъема
о груза, гибким органом, концы которого закреплены на верхней поверхности упорной .шайбы и барабане механизма подъема груза, и шарнирно-рычажным механизмом с приводом раздвижения,
15 причем конец грузового каната соеди нен с грузозахватным уст; ойством посредством шарнирно-рычажного механизма, взаимодействующего с верхней поверхностью упомянутой шайбы, при
20 этом грузовой канат охвачен витками гибкого органа.
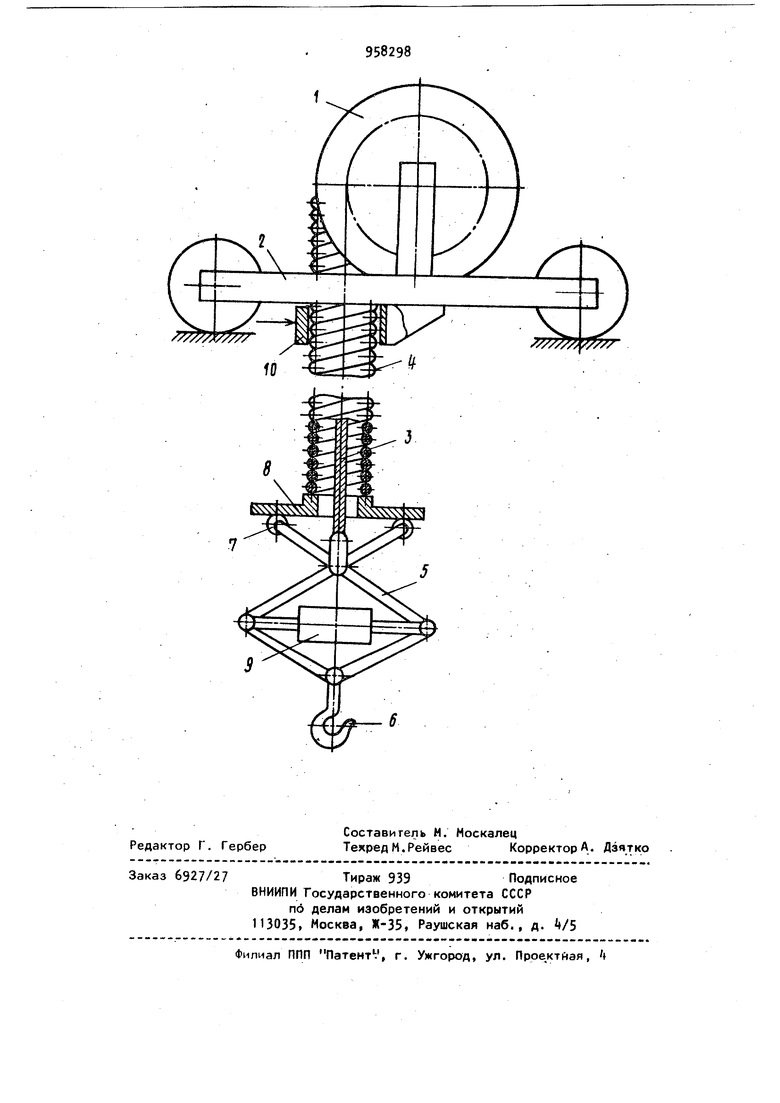
На чертеже изображена подвеска груза.
Подвеска груза состоит из механизма подъема 1, установленного на ос нованйи 2, грузового каната, состоящего из грузонесущего сердечника 3 и наружных прядей k. Грузонесущий сердечник 3 соединен с шарнирным механизмом 5| на котором закреплен грузовой крюк 6, на концах рычагов шарнирного механизма 5 установлены опорные катки 7 взаимодействующие с опорной шайбой В, жестко соединенной с наружными прядями t, В шарнирном механизме 5 встроен электрогидравлический толкатель 9 а на основании 2 установлено захватывающее устройство 10 тормозного типа.
Устройство работает следующим образом,
В момент наведения подвески на поднимаемый объект с помощью механизма подъема 1 шарнирный механизм 5, соединенный с крюком 6, находится в сложенном состоянии при помощи электтрогидравлического толкателя 9, управляемого из кабины крана. В этом случае опорные катки 7 не оказывают давления на опорную шайбу В. Захватывающее устройство 10 находится в расторможенном состоянии. Подъем и опускание груза осуществляется при положениях механизма, описанЙых выше .
После подъема или опускания груза на заданную высоту перед началом движения груза в горизонтальной плоскости захватывающее устройство 10 фи сирует наружные пряди k в заданной точке, а гидротолкатель 9 включается и не препятствует давлению опорных катков 7 шарнирного механизма 5 на опорную шайбу 8, которая сжимает наружные пряди k с усилием, пропорциональным массе груза. В этом случае канал приобретает заданную жесткость (пропорционально массе груза) за сче
растяжения грузонесущего сердечника 3 и сжатия наружных прядей k.
При этом система канат-груз из гибкого подвеса переходит состояние жесткого подвеса. Повышенная поперечная жесткость системы не позволяет грузу совершать колебательные движения в горизонтальной плоскости .
Изобретение позволяет повысить эффективность погрузочно-разгрузочных работ и исключить колебания груза.
Формула изобретения Подвеска груза, содержащая грузовой канат с грузозахватным устройством и механизм подъема груза с .барабаном, отличающаяся тем, что, с целью повышения эффективности работы подвески за счет обеспечения изменения жесткости подвеса в зависимости от массы Iподнимаемого груза, она снабжена упорной шайбой, зажимным приспособлением, жестко установленным на механизме,подъема груза, гибким органом, концы которого закг реплены на верхней поверхности упорной шайбы и барабане механизма подъема груза, и шарнирно-рычажным механизмом с приводом раздвижения, причем конец грузового каната соединен с грузозахватным устройством посредством шарнирно-рычажного механизма, заимодействуюи1его с верхней поверхностью упомянутой шайбы, при этом грузовой канат охвачен витками гибкого органа.
Источники информации, принятые во внимание при экспертизе
1.Андреев А. Ф. Грузозахватные устройства с автоматическим и дистанционным управлением. М., Стройиздат,
1979.
2.Авторское свидетельство СССР
№ 617357, кл. В 66 С 11/10, 26.01.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2755358C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| Строительный подъемник | 1977 |
|
SU742329A1 |
| Грузоподъемное устройство крана | 1982 |
|
SU1081117A1 |
| Трелевочная каретка подвесной канатной дороги | 1986 |
|
SU1355527A1 |
| Грузозахватное устройство | 1990 |
|
SU1751139A1 |