1
Изобретение относится к обработке металлов давлением, в частности к конструкциям радиально-ковочных машин, используемых для заковки концов труб.
По. основному авт. св. N 695756 известна радиально-ковочная машина для заковки коН цов труб перед волочением, содержащая ста шшу с установленным в ней поворотным корпусом, в котором смонтированы механизм ковки и механизм поворота корпуса. Механизм поворота корпуса вьшолнен в виде планетарной передачи, ведущее колесо которой закреплено на приводном эксцентриковом валу, ведомое - иа поворотном корпусе, а водило установлено на приводном валу с возможностью вращения и снабжено закрепленным на нем рычагом, подпружиненным относительно станины и контактирующим с конечным вьпсшочателем, установленным на станине 1 .
Если при работе машины по каким-либо прнчинам допустимое усилие ковки будет превышено, водило и рычаг, преодолев усилие пружины, совершают поворот, что при; ВОДИТ к срабатыванию конечного выключателя, который дает команду на выключение электрического двнгателя машины.
В известной машине перегрузка пронсходнт при рабочем ходе бойков (удар бойков по трубе) и сейчас же пр1екращается, так как бойки разводятся и освобождают трубу. При этом пружина возвращает отклоненный рычаг в исходное положение, который замьпсает датчик, дающий команду на вклнь
10 чение электрического двигателя. Таким образом, во время перегрузки машины прн рабочем ходе бойков поступает команда на отключение двигателя, а при разведении - команда на включение. Поскольку время раtsбочего хода бойков, т.е. время деформации трубы, неветшко, например, при частоте 1200 уд/мин оно составляет 0,025 с, элементы электрической- схемы управления не всегда успевают вьпслючить двигатель до
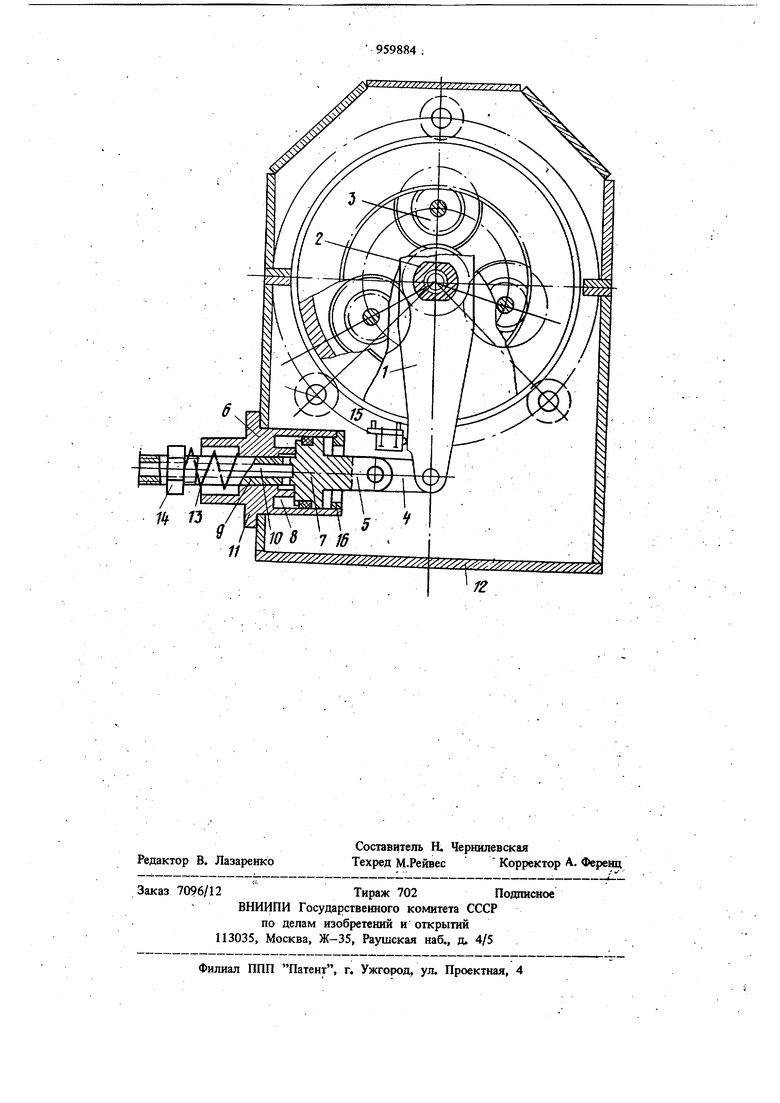
20 поступления команды на его включение прн размещении бойков. Указанное явление приводит к тому, что машина продолжает вести ковку в режиме перегрузки. Это может привести к преждевременному выходу маши ны из строя. Кроме того, частая смена команд при перегрузке может привести к выходу из строя элементов электрической схемы. Цель иэобретения - увеличение срока слу бы путем повышения надежности эащиты машины от пёрегрззки. Эта цель достигается тем, что известная ковочная машина, содержащая станину с установленными на ней поворотным корпусом, в котором смонтированы приводной эксцентриковый вал, кинематически связан с ръпатямк, на которых закреплены бойки, и механизм поворота корпуса, выполненный в виде планетарной передачи, ведущее зубчатое колесо которой закреплено на прийодном эксцентриковом валу, ведомое на поворотном корпусе, а водило установлено на указанном валу с возможностью вращения и снабжено закрепленными на нем рычагом, подпружиненным относительно станины и контактирующим с конечным выключателем, установленным на станине, снаб жена жестко закрепленнь1М на корпусе станины и соединенным с источником энергоносителя цилиндром одностороннего действия поршень которого вьшолнен с двумя штоками, один из которых шарнирно связан с рычагом, жестко соединенным с водилом, а пружина с регулировочной гайкой размещена на другом штоке и в нем вьшолнен канал для подачи знергоносителя в полость под поршнем. На чертеже представлена предлагаемая машина. Рычаг 1 машины жесрсо связан с водилом 2 планетарной передачи 3 и шариирно через тягу 4 подсоединен к щтоку 5 пневмоцилиндра 6 одностороннего действия. Шток S вьшолнен заодно с поршнем 7, который в исходном положении перекрывает доступ сжатого воздуха в рабочую полость 8. ДЯя подвода сжатого воздуха в рабочую полость в другом штоке 9 предусмотрен канал 10, корпус 11 пневмоцилиндра жестко закреЦлен на станине 12 ковочной машины. Поршень 7 поджат к корпусу пнев иоцилиндра тариро ванной пружиной 13, рассчитанной на удер° жание рычага 1 при работе машины без перегрузки. Усилие пружины 13 регулируется гайкой 14. Площадь сечения рабочей п лости пневмоцилиндра обеспечивает усилие на Щтоке, превышающее усилие тарированной пружины. Позицией 15 на чертеже обозначен датчик, замьпсаемый рычагом 1, позицией 16 - крышка пневмоцилиндра 6. При работе машины без перегрузки пружина удерживает шток, а вместе с ним поршень и рычаг в .исходном положении. При этом датчик 15 замкнут, и в рабочей полости пневмоцилиндра нет сжатого воздуха. Работа при перегрузке машины происходит следующим образом. Рычаг 1, преодолевая усилие тарированной пружины 13, поворачивается и увлекает поршень 7, который отходит от исходного положения и открьшает доступ сжатого воздуха в рабочую полость пневмоцилиндра 6. При этом поршень совершает свой рабочий ход до упора в крышку 16, а поскольку усилие . пневмоцилиндра больше усилия тарированной пружины 13, рычаг 1 не может вернуться в исходное положение при разведении бойков и замкнут в датчик. После устранения причины перегрузки рычаг 1 возвращают в исходное положение, для чего рабочую полость пневмоцилиндра сообщают с атмосферой. При этом тарированная пружина вернет шток, поршень и в исходное положение, при котором датчик будет замкнут, что даст возможность включить с пульта управления машину в работу. Использование изобретения позволит повысить надежность защиты радиально-ковочной машины от перегрузки и, следовательно, увеличит долговечность машины. Формула изобретения Радиально-ковочная ма.ц1ина, по авт. св. N 69575§, отличающаяся тем, что, с целью увелиечния срока службы путем повышения надежности защиты от перегрузки, она снабжена жестко закрепленным на корпусе станины и соединенным с источником знергоносителя цилиндром одностороннего действия, поршень которого вьшолнен с даумя щтоками, один из которых щарнирно связан с рычагом, жестко соединенным с воднлом, а пружина с регулировочной гайкой размещена на другом щтоке и в нем вьшолнен канал для подачи знергоносителя в полость над поршнем. Источники информации, принятые во внимание при экспертизе 1. Авторско свидетельство СССР № 695756, кл. В 21 J 7/16, 26.09.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиально-ковочная машина | 1981 |
|
SU1061901A1 |
| Радиально-ковочная машина | 1977 |
|
SU695756A1 |
| ПРИВОД РАБОЧИХ ИНСТРУМЕНТОВ КОВОЧНОЙ МАШИНЫ | 1990 |
|
RU2015025C1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Привод рабочих инструментов ковочной машины | 1990 |
|
SU1750832A1 |
| Радиально-ковочная машина | 1977 |
|
SU700258A1 |
| ЗАЖИМНАЯ ГОЛОВКА-МАНИПУЛЯТОР | 2005 |
|
RU2295436C2 |
| Радиально-ковочная машина | 1983 |
|
SU1186343A1 |
| Механизм вращения хобота ковочного манипулятора | 1982 |
|
SU1038052A1 |
| ПУЛЬСАТОРНЫЙ ГИДРОПРИВОД РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241565C1 |