(54) СХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1982 |
|
SU1016156A1 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Схват манипулятора | 1987 |
|
SU1553378A1 |
| Схват промышленного робота | 1988 |
|
SU1830344A1 |
| Схват манипулятора | 1982 |
|
SU1061988A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Захватное устройство манипулятора | 1990 |
|
SU1756146A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Манипулятор | 1983 |
|
SU1151452A1 |
1
Изобретение относится к манипуляторам для механизации подъемно-транспортных и других технологических операций, а именно к захватным устройствам манипуляторов.
Известен схват манипулятора, содержащий корпус, губки с приводами их перемещения, выполненными каждый в виде силового цилиндра с основным поршнем 1.
Недостатком известного устройства является малое усилие зажима детали.
Цель изобретения - повышение усилия зажима детали.
Цель достигается тем, что схват снабжен расположенными в корпусе каждого силового цилиндра дополнительным поршнем, стаканом, шариками и шарнырным четырех звенником с роликами на осях шарниров, причем на стакане выполнена наружная коническая поверхность, на основном поршне выполнены скосы, а губка размещена на дополнительном поршне и этот поршень связан со стаканом посредством двух противоположных шарниров шарнирного четырехзвенника, при этом шарики размешены между конической поверхностью стакана и внутренней поверхностью корпуса, а ролики,-закрепленные на двух других противоположных шарнирак шарнирного четырехзвенника, размеш,ены с возможностью взаимодействия со скосами основного поршня.
5Кроме того, ролики, стакан и шарики
подпружинены.
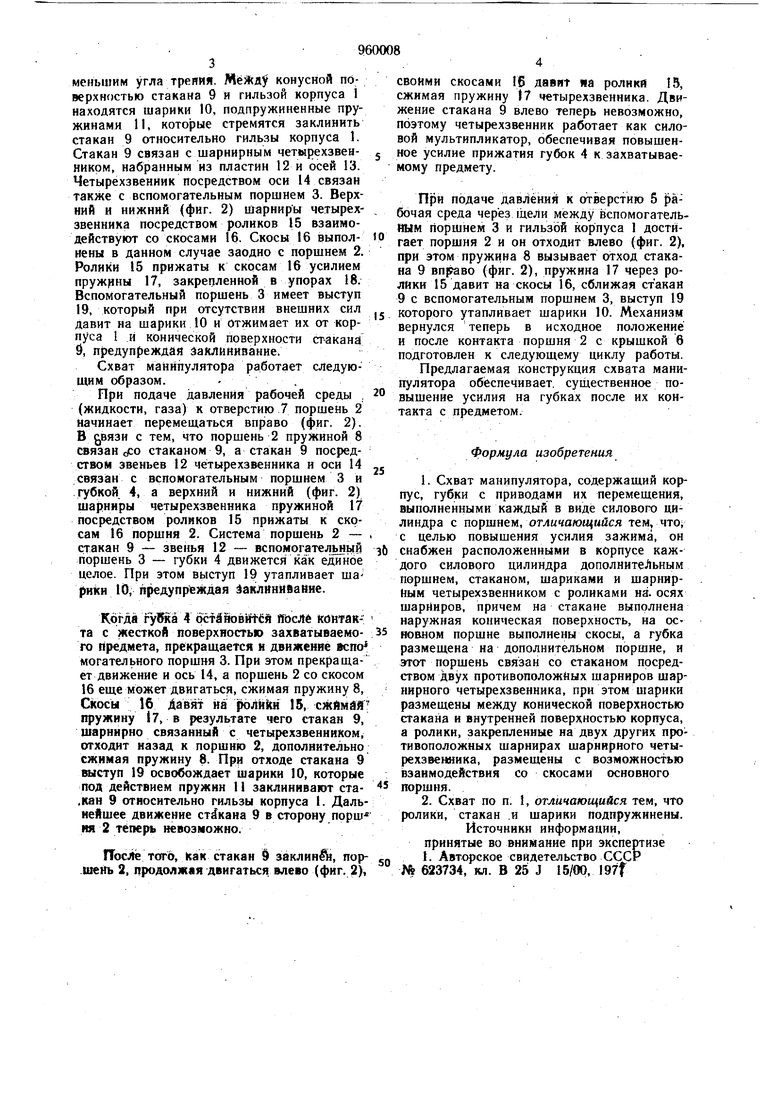
На фиг. 1 изображен схват, общий вид; на фиг. 2 - узел I на фиг. 1, разрез;
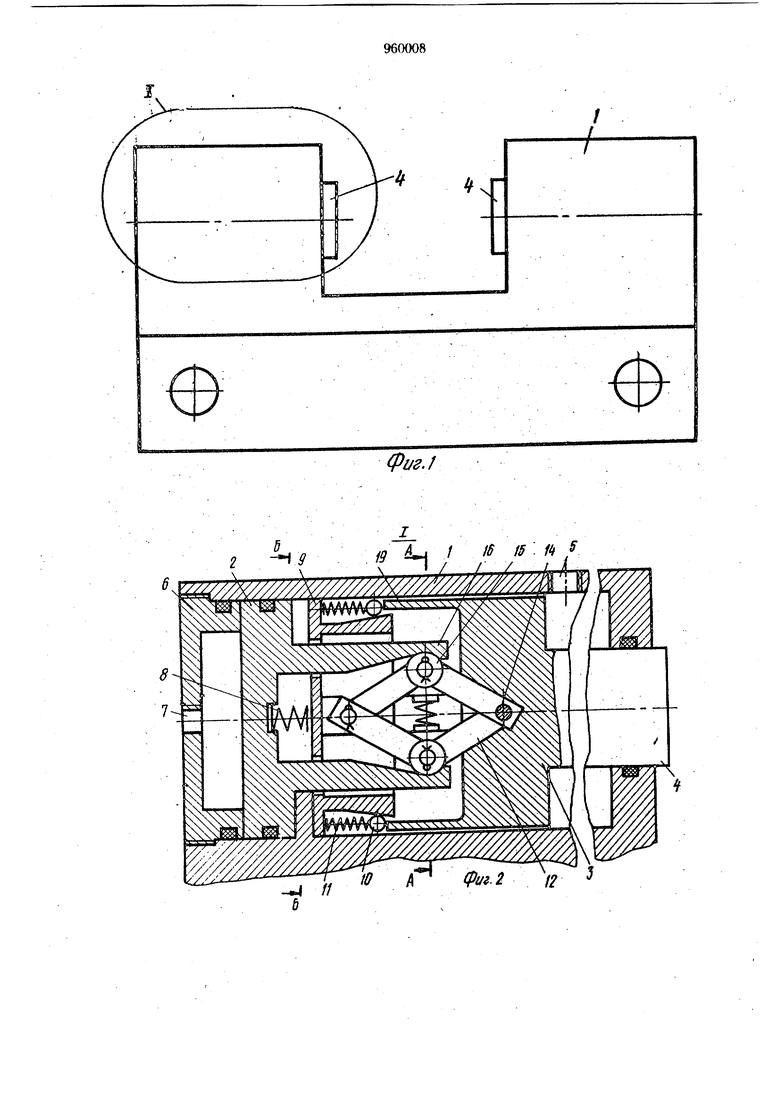
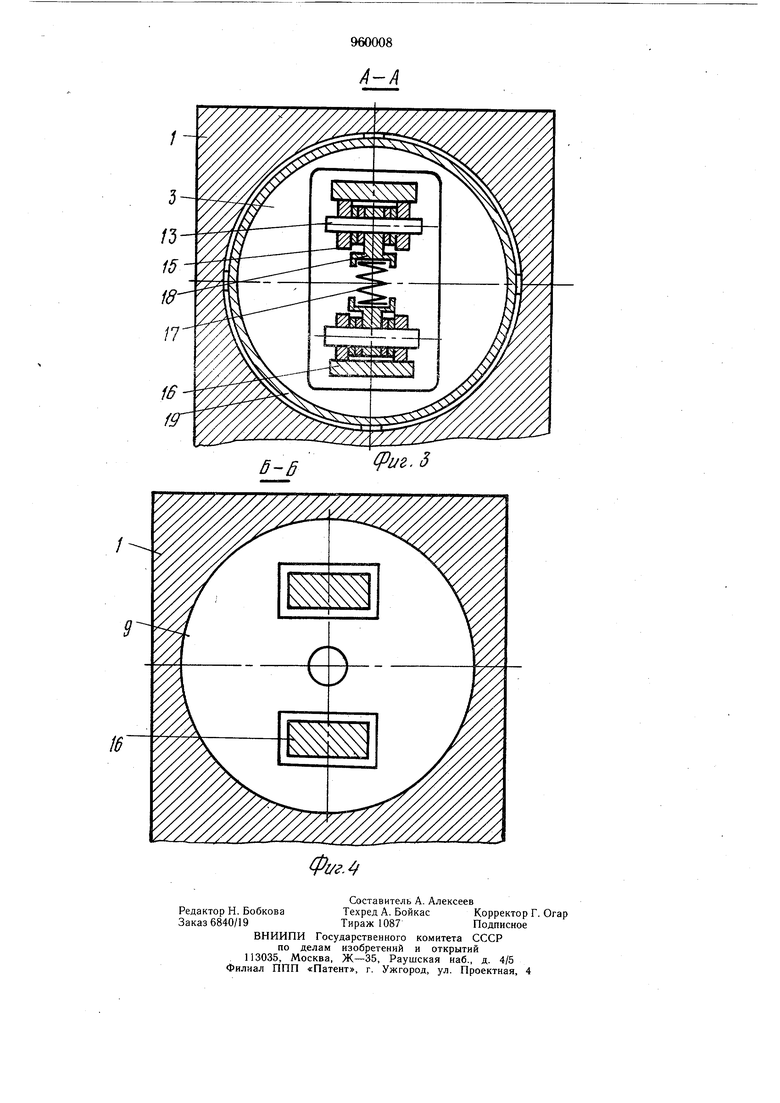
,Q на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2.
Схват манипулятора содержит корпус 1 с отверстиями для крепления к исполнительному органу. В корпусе 1 выполнены также .расточки, которые являются гильзами сило15 вых цилиндров, содержащих основной поршень 2 и вспомогательный поршень 3, выполненный в данной конструкции заодно с губкой 4. В корпусе 1 предусмотрено отверстие 5, а в крышке 6 - отверстие 7 для
2Q подвода и отвода рабочей среды (жидкости, газа).
Поршень 2 посредством пружины 8 связан со стаканом 9, который имеет конусную поверхность (фиг. 2) с полууглом конуса.
меньшим угла трения. конусной поверхностью стакана 9 и гильзой корпуса 1 находятся шарики 10, подпружиненные пружинами 11, которые стремятся заклинить стакан 9 относительно гильзы корпуса 1. Стакан 9 связан с шарнирным четмрехзвенНИКОМ, набранным из пластин 12 и осей 13. Четырехзвенник посредством оси 14 связан также с вспомогательным поршнем 3. Верхний и нижний (фиг. 2) шарниры четырехзвенника посредством роликов 15 взаимодействуют со скосами 16. Скосы 16 выполнены в данном случае заодно с поршнем 2. Ролики 15 прижаты к скосам 16 усилием пруж|1ны 17, закрепленной в упорах 18. Вспомогательный поршень 3 имеет выступ 19, который при отсутствии внешних сил давит на шарики 10 и отжимает их от корпуса 1 и конической поверхности ст-акана 9, предупреждая заклинивание.
Схват маННпулятора работает следующим образом...
При подаче давленНя рабочей среды , (жидкости, газа) к отверстию 7 поршень 2 начинает перемешаться вправо (фиг. 2). В вязн с тем, что поршень 2 пружиной 8 связан dco стаканом 9, а стакан 9 посредством звеньев 12 чётырехзвенника и оси 14 связ;ан с вспомогательным поршнем 3 и губкой. 4, а верхний н нижний (фиг. 2) шарниры чётырехзвенника пружиной 17 посредством роликов 15 прижаты к скосам 16 поршня 2. Система поршень 2 - стакан 9 - звенья 12 - вспомогательный поршень 3 - губки 4 движется как единое целое. При этом выступ 19 утапливает шарики 10, предупреждая Лаклйнивавие.
Когда гувка 4 ocf 1йов1Н- ;й ИЬсле контак-; та с жесткой поверхностью захватываемого предмета, прекращается н движение вспо могательного поршня 3. При этом прекраш,ает движение н ось 14, а поршень 2 со скосом 16 еще может двигаться, сжимая пружину 8, Скосы 16 Давят на jjk)flhkii 15, сжимай пружину 17, в результате чего стакан 9, шарнирно связанный с четырехзвенником, огходнт назад к поршню 2, дополнительно сжимая пружнну 8. При отходе стакана 9 выступ 19 освобождает шарики 10, которые под действием пружнн 11 заклннивают ста,кан 9 относительно гильзы корпуса 1. Дальнейшее движение стакана 9 в сторону порш ня 2 теперь невозможно.
После того. Как стакан § заклинИ, поршень 2, продолжая двигаться, влево (фиг. 2),
своими скосами 16 давит яа ролики 15, сжнмая пружину t7 чётырехзвенника. Движение стакана 9 влево теперь невозможно, поэтому Четырехзвенник работает как силовой мультипликатор, обеспечивая повышенное усилие прижатия губок 4 к захватываемому предмету.
При подаче давлений к отверстию 5 рабочая среда черезлцели между вспомогательйым поршнем 3 и гильзой корпуса 1 достигает поршня 2 и он отходит влево (фиг. 2), при этом пружина 8 вызывает отход стакана 9 вп|Раво (фиг. 2), пружина 17 через ролики 15 давит на скосы 16, сближая стакан 9 с вспомогательным поршнем 3, выступ 19 которого утапливает шарики 10. Механизм вернулся теперь в исходное положение и после контакта поршня 2 с крышкой 6 подготовлен к следующему циклу работы.
Предлагаемая конструкция схвата манипулятора обеспечивает, существенное повышение усилия на губках после их контакта с предметом.
Формула изобретения
Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 623734, кл. В 25 J 15/00, I97f / IS /5 . ft фиг.2 12 S
