9 .
J&b
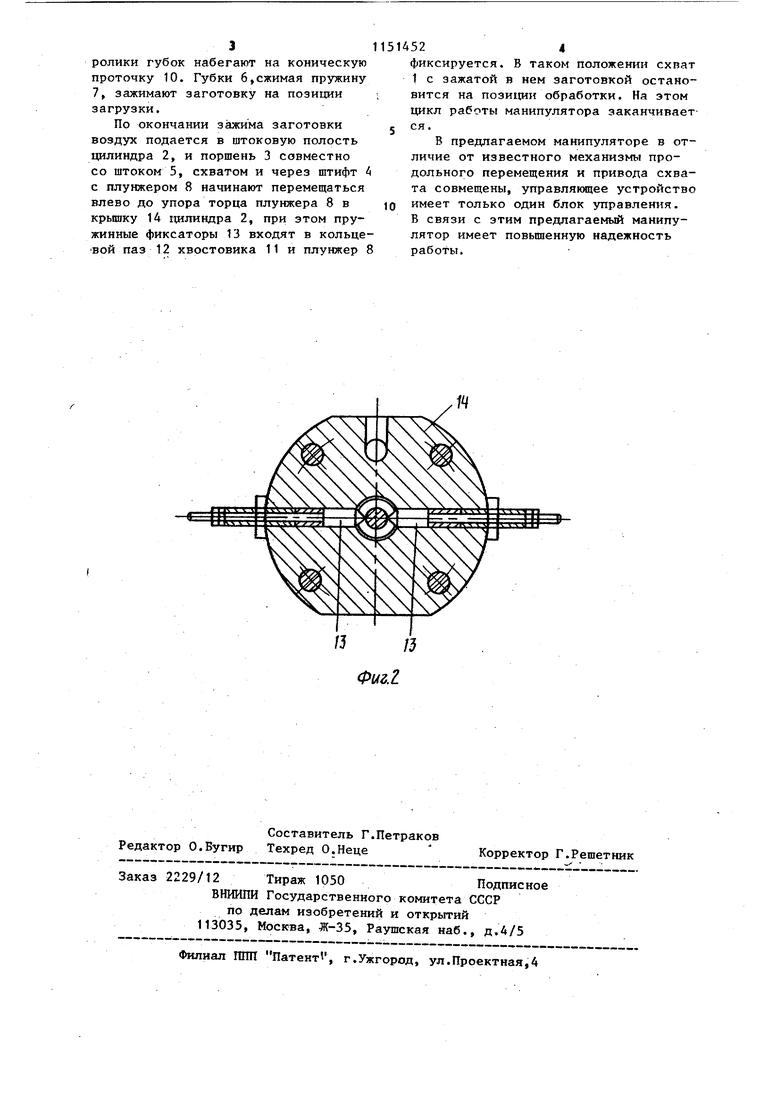
сл tvd Изобретение относится к оборудованию для комплексной механизации и автоматизации производства, в том числе к манипуляторам. Известен манипулятор, содержащий схват, механизмы продольного перемещения и привода схвата, выполненные в виде двух отдельных цилиндров, каж дый из которых имеет корпус, поршень и шток, смонтированных по телескопической схеме. При этом управляющее устройство должно иметь также два . блока О. Недостатками манипулятора являются сложность управлякщей и исполнительной частей конструкции и невысокая надежность. Наиболее близким к изобретению по технической сущности является манипулятор, содержащий схват, механизм продольного перемещения схвата, вьшолненный в виде основного силового цилиндра, в полости поршня которого размещен порщень силового цилиндра привода губок схвата L2. Недоста.тком известного манипулятора является невысокая надежность из-за наличия большого числа управляющих коммутационньк элементов. Цель изобретения - повьш1ение надежности манипулятора. Эта цель достигается тем, что манипулятор, содержащий схват, механизм продольного перемещения схвата выполненный в виде основного силового цилиндра,в полости поршня которого размещен поршень силового цилиндра привода губок схвата,снабжен размещен ными в задней крьшисе основного силового цилиндра и подпружиненными относи тельно крышки фиксаторами, привод губок схвата вьтолнен в виде плунжера с хвостовиком и ограничителем его осевого перемещения относи тельно поршня основного силового цилиндра, а на хвостовике выполнен паз с внутренними поверхностями, предназначенными для взаимодействия с фиксаторами, при этом штоковая полость основного силового цилиндра и рабочая полость плушсера сообщены между собой. На фиг. 1 изображен предлагаемый манипуляторJ на фиг, 2 - задняя крьш ка с фиксаторами. Манипулятор состоит из схвата t, механизма, продольного перемещения в виде силового цилиндра 2, имекяцего 522 полый поршень 3 и жестко связанный с ним посредством штифта А шток 5, на котором шарнирно закреплены губки 6 схвата 1, подпружиненные пружиной 7, Внутри полого поршня 3 концентрично размещен силовой цилиндр механизма привода схвата 1 в виде плунжера 8, имеющего ограничитель осевого перемещения в виде паза 9, взаимодействующего со штифтом 4. Выходной конец плунжера 8 связан с губками 6 схвата 1 посредством конической проточки 10. На внутреннем конце плунжера 8 вьтолнен хвостовик 11с пазом 12, который взаимодействует с пружинными фиксаторами 13, размещенными в задней крьш1ке 14 силового цилиндра 2. Нагнетательные полости 15 и 16 силового цилиндра 2 и плунжера 8 сообщены между собой. Планки 17 и 18 служат ограничителями от проворота схвата 1. Манипулятор работает следующим образом. В исходном положении шток 5 и плунжер 8 находятся в крайнем левом положении (фиг. 1), при котором штифт 4 воздействует на левую стенку паза 9. Шток 5 зафиксирован пружинными фиксаторами 13, при этом схват 1 с зажатой в нем заготовкой находится на позиции обработки. При подаче воздуха в нагнетательные полости 15 и 16 силового цилиндра 2 и плунжера 8 начинают перемещаться поршень 3 со штоком 5 до упора штифта А в правую стенку паза 9 плунжера 8. При этом ролики губок 6 сходят с конической проточки 10 и губки 6 под действием пружины 7 освобождают зажатую заготовку. В это же время схват 1 перемещается с позиции обработки на величину зваимного перемещения штока 5 и плунжера 8. При дальнейшем перемещении поршня 3 штифт 4 воздействует на правую стенку паза 9 плунжера 8 и, освобождая фиксирукщий хвостовик 11 от плунжерных фиксаторов 13, перемещает плунжер 8 вправо до тех пор, пока поршень 3 и связанный жестко с ним штифтом 4 шток 5 не достигает своего крайнего правого положения, при котором схват 1 перемещается с, позиции обработки на позтщю загрузки. После этого под действием давления на торец плунжера 8 он продолжает перемещаться вправо, паэ 9 перемещается относительно штифте 4, а
31
ролики губок набегают на коническую проточку 10. Губки 6,сжимая пружину 7, зажимают заготовку на позиции ; загрузки.
По окончании зажима заготовки воздух подается в штоковую полость цилиндра 2, и поршень 3 совместно со штоком 5, схватом и через штифт 4 с плунжером 8 начинают перемещаться влево до упора торца плунжера 8 в крьппку 14 цилиндра 2, при этом пружинные фиксаторы 13 входят в кольцевой паз 12 хвостовика 11 и плунжер 8
1514524
фиксируется. В таком положении схват 1 с зажатой в нем заготовкой остановится на позиции обработки. На этом цикл работы манипулятора заканчивает5
В предлагаемом манипуляторе в отличие от известного механизмы продольного перемещения и привода схвата совмещены, управлянщее устройство JO имеет только один блок управления. В связи с этим предлагаемый манипулятор имеет повышенную надежность работы.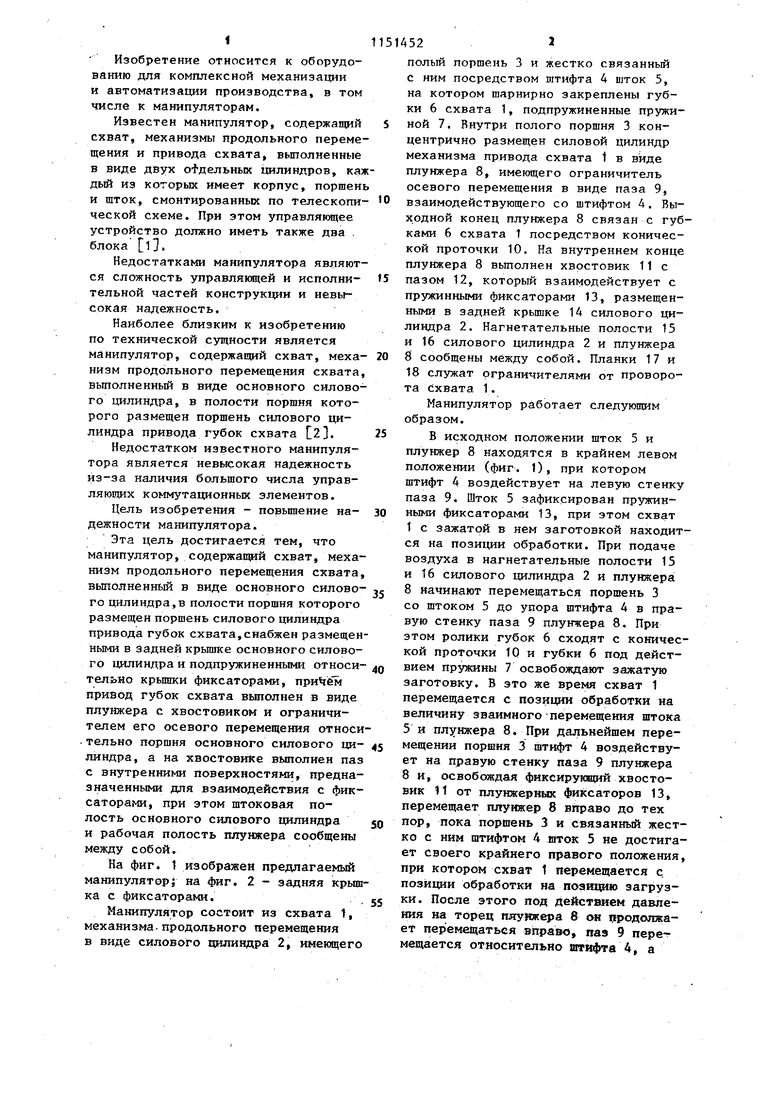
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Схват | 1980 |
|
SU1046085A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Манипулятор | 1979 |
|
SU823118A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Схват манипулятора | 1987 |
|
SU1537522A1 |
| Схват | 1987 |
|
SU1440707A2 |
| Схват манипулятора | 1989 |
|
SU1684028A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
МАНИПУЛЯТОР, содержащий схват, механизм продольного перемецения схвата, выполненный в виде основного силивого цилиндра,в полости поршня которого размещен поршень силового цилиндра привода губок схвата, отличающийся тем,что, с целью повышения надежности, он снабжен размещенными в задней крьппке основного силового цилиндра и подпружиненным относительно крышки фиксаторами, причем привод губок схвата выполнен в виде плунжера с хвостовиком и ограничителем его осевого перемещения относительно поршня основного силового цилиндра, а на хвостовике вьшолнен паз с внутренними поверхностями, предназначенными для взаимодействия с фиксаторами, при зтом щтоковая полость основного силового цилиндра и рабочая полость плунжера сообщены между собой. ел
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промьгашенные работы | |||
| М., Машиностроение, 1975, с | |||
| Устройство непрерывного автоматического тормоза с сжатым воздухом | 1921 |
|
SU191A1 |
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
