Изобретение относится к манипуляторам для механизации подъемно-транс портных и других технологических оп раций, а Оолеё конкретно к схватам манипуляторов. Известен .схват манипулятора, содержащий корпус, губки с приводами и перемещения, выполненными каждый в виде силового цилиндра с основным и дополнительным поршнями,, причем на основном поршне выполнены скосы, а также стакан, наружная поверхность которого выполнена конической и тела качения, расположенные на этой поверхности, причем стакан подпружинен относительно основного и дополнитель ного поршней, и замковый механизм, связывающий основной и дополнитедьИЬ9Й поршни 1 . . Недостатком известного устройства является нестабильное усилие зажима Целью изобретения является обеспе чение стабильности усилия зажима. Указанная цель достигается тем, ЧТО в схвате манипулятора, содержа щего корпус, губки с приводами их пе ремещения, выполненными каждый в виде силового цилиндра с основным и до полнительным поршнями, причем на основном поршне выполнены скосы, а так же стакан, наружная поверхность KdTO рого выполнена конической, и тела ка чения, расположенные на этой поверхности, причем стакан подпружинен относительно основного и дополнительно го поршней/ и замковый механизм, свя зывающий основной и дополнительный поршни,замковый механизм выполнен в виде расположенных между основном и дополнительным поршнями и взаимодействующими между собой двумя подпру1жиненными между собой клиньями сектором, связанным с дополнительнш поршнем, и упором, связанным с основ ным поршнем, при этом клинья расположены с возможностью взаимодействия со скосами основного поршня. На фиг. показан схват манипулятора, общий вид; на фиг. 2 - узел 1 на фиг. 1 (разрез), Схват манипулятора содержит корпус 1, в котором выполнены расточки г являющиеся гильзе(ми силовых цилиндров, содержащих основной по|даеиь 2 и дополнительный поршень 3, выполнен ный заодно с губкой 4. В корпусе 1 выполнено отверстие 5, а в крышке 6 отверстие 7. для подво1да и отвода рабочей среды. Основной поршень 2 посредством пружины 8 связан со стаканом 9, кото рый имеет конусную поверхность (фиг. 2) с полууглом конуса, меньшим угла трения. Между конусной поверхностью стакана 9 и гильзой корпуса 1 находятся тела качения (шарики) Ю, подпружииенчые пружинами 11 которые стремятся заклинить стакан 9 относи-;твльно гильзы корпуса 1. стакан 9 шарнирно связан с упором 12 и с парой клиньев 13, подпружиненных пружиной 14 так, что их выпуклые поверхности прижаты к скосам поршня 2. Скошенные поверхности клиньев 13 взаимодействуют с аналогичными поверхностями сектора 15, шарнирно связанного с,дополнительным поршнем 3. С целью повышения нагрузочной способности упор 12 соприкасается непосредственно со стаканом 9, а сектор 15 может соприкасаться своей выпуклой поверхностью с выемкой, выполненной в дополнительном поршне 3, при этом шарниры служат только для кинематической связи деталей механизма между собой. Для этой же цели предназначены и закраины, выполненные на периферийных частях клиньев 13. Дополнительные поршень 3 выполнен с выступом 16, который при отсутствии внешних сил отжимает шарики 10 от корпуса 1 и конической поверхности стакана 9,-. предупреждая заклинивание. Схват манипулятора работает следующим образом. При подаче рабочей среды (жидкости, газа) к отверстию 7 основной поршень 2 начинает перемещаться вправо (фиг. 2). В связи с тем, что основной поршень 2 пружиной 8 связан со стаканом 9, а стакан 9, в свою очередь с упором 12,- клиньями 13, сектором 15 и с дополнительньол поршнем 3, а клинья 13 подпружинены и прижаты к скосам основного поршня 2, система деталей основной поршень 2 стакан 9 - упор 12 - клинья 13 - сектор 15 - дополнительный поршень 3 губки 4 движется как единое целое, а BidCTyn 16 утапливает шарики 10, предупреждая заклинивание. Когда губка 4 остановится побле контакта с жесткой поверхностью захватываемого предмета, прекращается и движение дополнительного поршня 3 а также сектора 15, так как выпуклая его поверхность,упирается в выемку дополнительного поршня 3; Основной nojsaeHb, 2- еще может продвигаться вправо (фиг. 2), сжимая пружину 8. Скосы основного поршня 2, давят на выпуклые поверхности клиньев 13, сближая их и сжимая пружину 14, При зтом упор 12 отходит несколько влево, дополнительно сжимая пружину 8 и освот бождая шарики 10, которые под действием пружин 11 заклинивают стакан 9 относительно гильзы корпуса 1. Дальнейшее движение стакана 9 влево (фиг. 2) теперь невозможно. После заклинивания стакана 9 основной порлень 2, продолжая двигаться влево, своими -скосами давит на клинья 13, вызьшая продвижение сектора 15 и связанного с ним дополнительного поршця 3f и тем сгшым обеспечивая создание необходимого усилия зажима.
При подаче давления к отверстию 5 рабочая среда через щели между допол-, иительным поцшнем 3 и гильзой корпу- са 1. достигает основHOt o поршня 2 и он отходит влево (фиг./2), при это1м пружина 8 продвигает стакан 9 вправо, пружниа 14 давит на клинья .13 и на связанные с ними скосы поршня 2. СтаЮ кан 9 сближается с дополнительным
поршнем 3, выступ 16 утапливает шарики 10. Теперь .механизм вернулся в ис-. ходкое Положение и пос.ле контакта ос-, новного поршня 2 с крышкой 6 подгото лен к следующему циклу работы.
Такая конструкция схвата манипулятора обеспечивает стабильное усилие зажима на губках после их контакта с предметом, что способствует повышению техники безопасности рабочих npv обслуживании технологического o6ojr дования.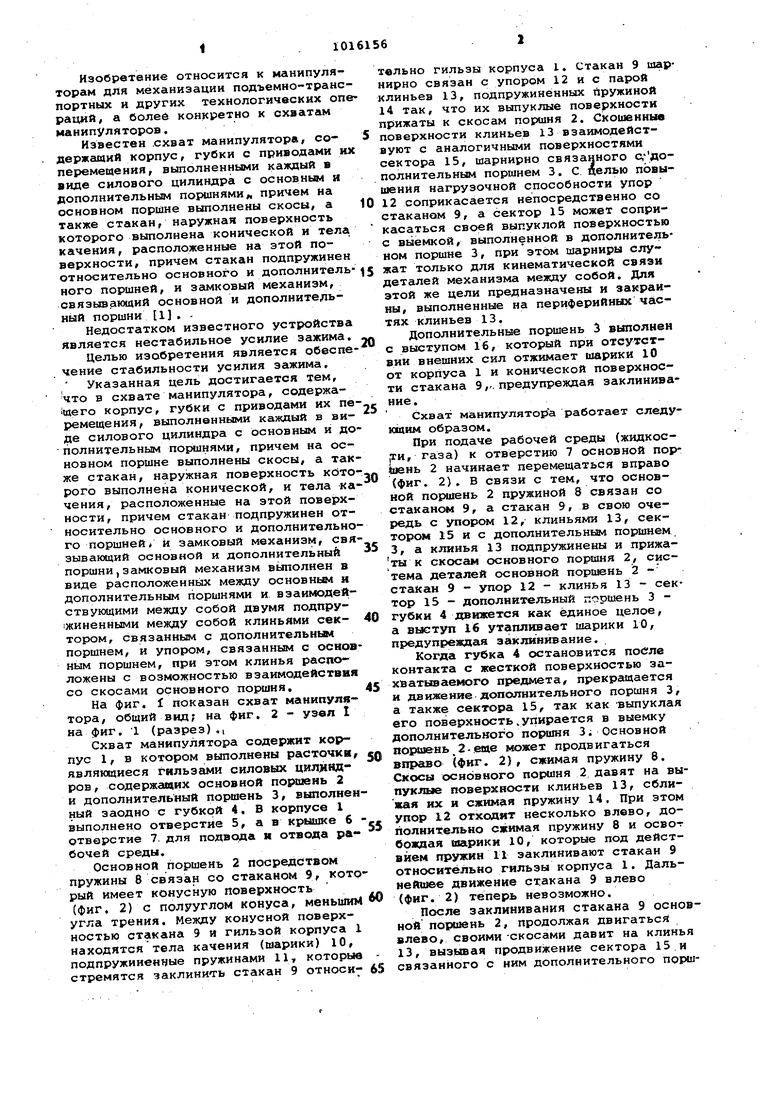
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU960008A1 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| Захватное устройство манипулятора | 1990 |
|
SU1756146A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Схват манипулятора | 1987 |
|
SU1537522A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Портальный робот | 1987 |
|
SU1472251A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
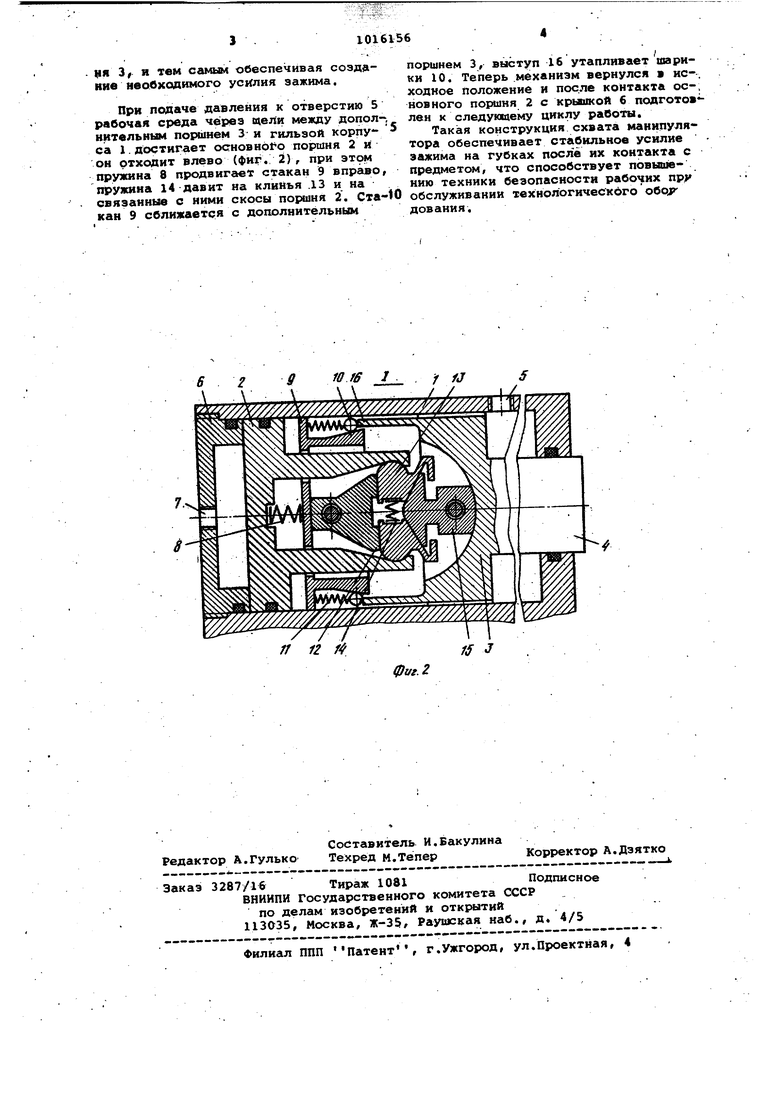
СХВАТ МАНИПУЛЯТОРА, содержащий корпус, губки с приводами их перемещения, вьтолненными каждый в виде силового цилиндра с основным и дополнительным поршнями, причем на основном поршне выполнены скосы, а также стакан, наружная поверхность которого выполнена конической, и тела качения, расположенные на этой по8 врхиостиг причем стакан подпружинен отиосительно основного и дополнительного поршжей, и эамковай механизм, связывающий основной и дополнительный поршни, о т л и ч а ю ц и и с я тем, что, с целью обеспечения стабильности усилия зажима, замковый механизм выполнен в виде расположенных между основным и дополнительным поршнями и взаимодействующими между собой двумя подпруясиненными клийьями сектором, связанным с дополнительным поршнем, и упором, связанным с основным поршнем, при ЭТСЧ4 клинья расположены ® с возможностью взаимодействия со ско (Л сами основного ПОЕФНЯ. X / { О) СП о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3253363/25-08, кл. | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
