Изобретение относится к машиностроению, а именно к схватам манипуляторов Ц промышленных роботов, и может быть Использовано для механизации и автоматизации технологических процессов.
Цель изобретения - фиксация поло- Хения захватных рычагов в разведенном и сведенном состоянии и предотвращени самопроизвольной их расфиксации при падении давления в силовом цилиндре,
Цель достигается за счет применения механизма фиксации.
На фиг. изображен схват при сведенных захватных рычагах; на фиг. 2 - то же, при разведенных.
Схват состоит из корпуса 1, силового цилиндра 2, захватных рычагов 3, шарнирно установленных на корпусе 1 и снабженных губками 4. Поршень 5 силового цилиндра 2 и его шток 6 выполнены полыми. Шток 6 через звенья 7 кинематически связан с захватными рычагами 3. Внутри поршня 5 находится дополнительный поршень 8, подпружиненный пружинами 9 и 10. На конце шгока 11 дополнительного поршня 8 установлен стакан 12 и клин 13, выполненный з виде усеченного конуса, сопряженного с цилиндрами, основания которых являются основаниями конуса На корпусе 1 шарнирно установлены двуплечие рычаги 14, которые через промежуточные звенья 15 шарнирно связаны с захватными рычагами 3. На клине 13 установлены фиксаторы 16.
Схват работает следующим образом.
При захвате детали по внешнему контуру (исходное состояние устройства) поршень 5 и дополнительный пор
5
5
о
0
5
0
5
шень 8 находятся в верхней части си- лового цилиндра 2. Захватные рычаги 3 разведены. Концы двуплечих рычагов 14, взаимодействующие с клином 13, располагаются в стакане 12, а фиксатор 16 предотвращает самопроизвольное опускание штока 11 с клином 13, так как сила их веса, недостаточна для преодоления усилия фиксатора 16. Захватные рычаги 3 зафиксированы в разведенном состоянии.
При подаче воздуха в надпоршневое пространство силового цилиндра 2 первым начинает движение дополнительный поршень 8, та.к как его площадь больше площади поршня 5. Концы двуплечих рычагов 14 выходят из стакана 12. Дополнительный поршень 8 через пружину 10 давит на поршень 5. Поршень 5 силового цилиндра 2, перемещаясь через звенья 7, поворачивает захватные рычаги 30 Происходит захват детали за наружную поверхность. Одновременно с этим концы двуплечих рычагов 14 взаимодействуют с большим сечением клина 13, фиксируя захватные рычаги 3 в сведенном состоянии.
Формула изобретения
Схват манипулятора, содержащий корпус, силовой цилиндр с поршнем со штоком и шарнирно закрепленные на корпусе захватные рычаги, кинематически связанные с приводом, на одном из элементов которого установлен клин, взаимодействующий с захватными рычагами, отличающийся тем, что, с целью обеспечения фиксаьчи пофиксаторами и стаканом, двуплечих ры- IQ кана имеют возможность взаимодейст- чдгов, шарнирно закрепленных на корпусе, и промежуточных звеньев, причем поршень и шток силового цилиндра выполнены полыми и в них расположены соответственно дополнительный подпру- 15 рычагах.
вия с одними из концов двуплечих рьг чагов, другие концы которых шарнирно связаны с промежуточными звеньями, , шарнирно установленными на захватных
Редактор А. Долинич
Фиг. 2
Составитель А. Чернышев
Техред М.Дидык Корректор С. Шевкун
кана имеют возможность взаимодейст- рычагах.
вия с одними из концов двуплечих рьг чагов, другие концы которых шарнирно связаны с промежуточными звеньями, , шарнирно установленными на захватных
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1321581A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Захватное устройство | 1982 |
|
SU1007973A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |

Изобретение относится к области машиностроения, а именно к схватам манипуляторов и промышленных роботов, и может быть использовано для механизации и автоматизации технологических процессов. Целью изобретения является фиксация положения захватных рычагов в разведенном и сведенном состоянии и предотвращение самопроизвольной их расфиксации при падении давления в силовом цилиндре за счет применения механизма фиксации. Схват состоит из корпуса 1, силового цилиндра 2, захватных рычагов 3, шарнирно установленных на корпусе 1. Поршень 5 силового цилиндра 2 выполнен полым и в нем размещен дополнительный поршень 8. Шток 6 поршня 5 кинематически связан с захватными рычагами 3. На конце штока 11 дополнительного поршня 8 установлен стакан 12 и клин 13 с фиксаторами 16, выполненный в виде усеченного конуса, сопряженного с цилиндрами, основания которых являются основаниями конуса. Клин 13 взаимодействует с двуплечими рычагами 14, которые через промежуточные звенья 15 шарнирно связаны с захватными рычагами 3. При разведенном положении захватных рычагов 3 концы двуплечих рычагов 14 взаимодействуют с внутренней поверхностью стакана 12 и фиксаторами 16, чем обеспечивается фиксация положения захватных рычагов 3. При сведенном положении концы двуплечих рычагов 14 взаимодействуют с большим сечением клина 13, чем обеспечивается их фиксация в данном положении. 2 ил.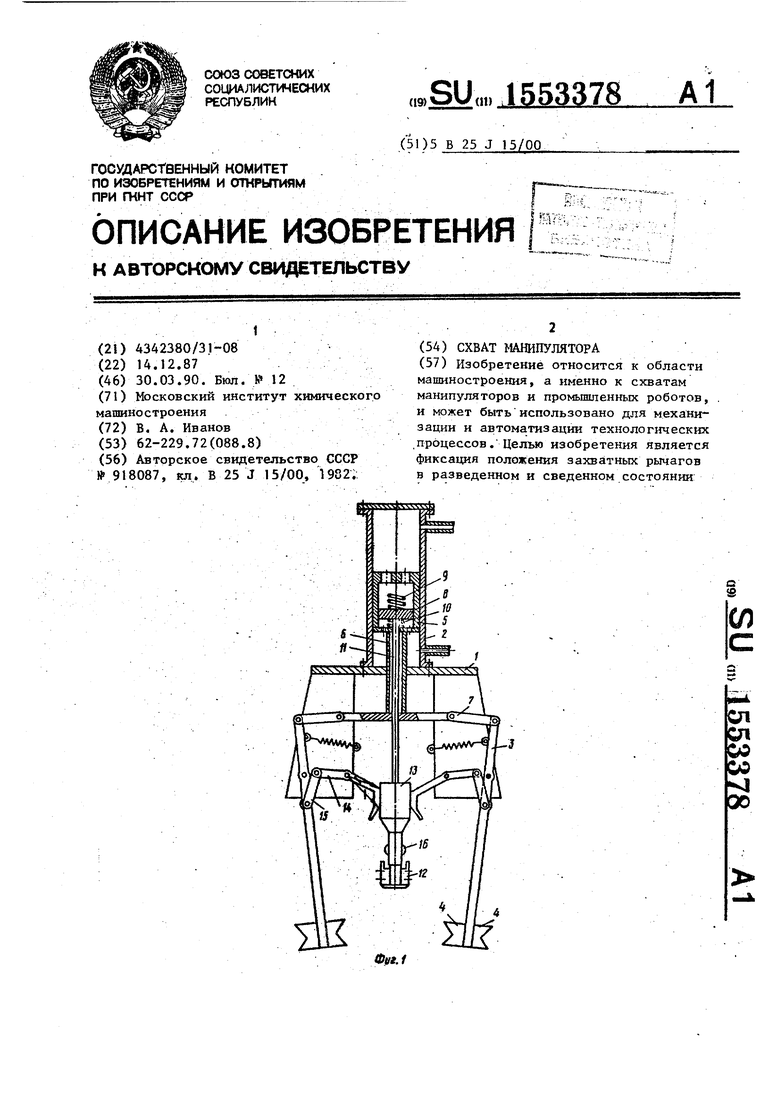
| Схват промышленного робота | 1980 |
|
SU918087A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
