Изобретение относится к подъемнотранспортному машиностроению, а именно к устройствам для улавливания цепей вертикального конвейера, преимущественно многокабинного, предназначенного для транспортировки техдокументации в административных зданиях либо библиотеках.
Известно устройство для улавливания цепей вертикального конвейера, выполненное в виде сцепляющейся с цепью звездочки, приводящей через ряд передач во вращение центробежньй регулятор скорости, подвижная муфта которого при превышении допустимой для цепи скорости воздействует на систему электропривода конвейера, останавливая его.
Однако этоустройство имеет значительные размеры, а его размещение внутри шахты вертикального многокабинного конвейера затруднитетьно. Кроме того, это устройство не может быть применено для конвейеров, режим работы которых связан с использованием нескольких скоростей движения, поскольку устройство срабатывает только от превьшения скорости цепи.
Известно также устройство для- улавливания цепей вертикального конвейера, содержащее стопорньй механизм и взаимодействующие с цепями башмаки, установленные на поворотных рычагах, имеющих оси, и конечные выключатели привода конвейера.
Однако такое устройство не обладает быстродействием, его работа связана с возникновением значительных динамических усилий, что не исключает повреждение звеньев цепи.
Цель изобретения - повьш1ение надежности работы устройства для улавлизания цепей.
Это достигается тем, что стопорный механизм выполнен в виде установленных консольно на корпусе звездочек, находящихся в зацеплении с цепями конвейера и с цевочным колесом ось которого размещена в пазу корпуса устройства с возможностью вертикального перемещения и взаимодействия с конечными выключателями, при этом на осях поворотных рычагов с башмаками установлены тяги, взаимодействующие с конечньЛга выключателями привода конвейера.
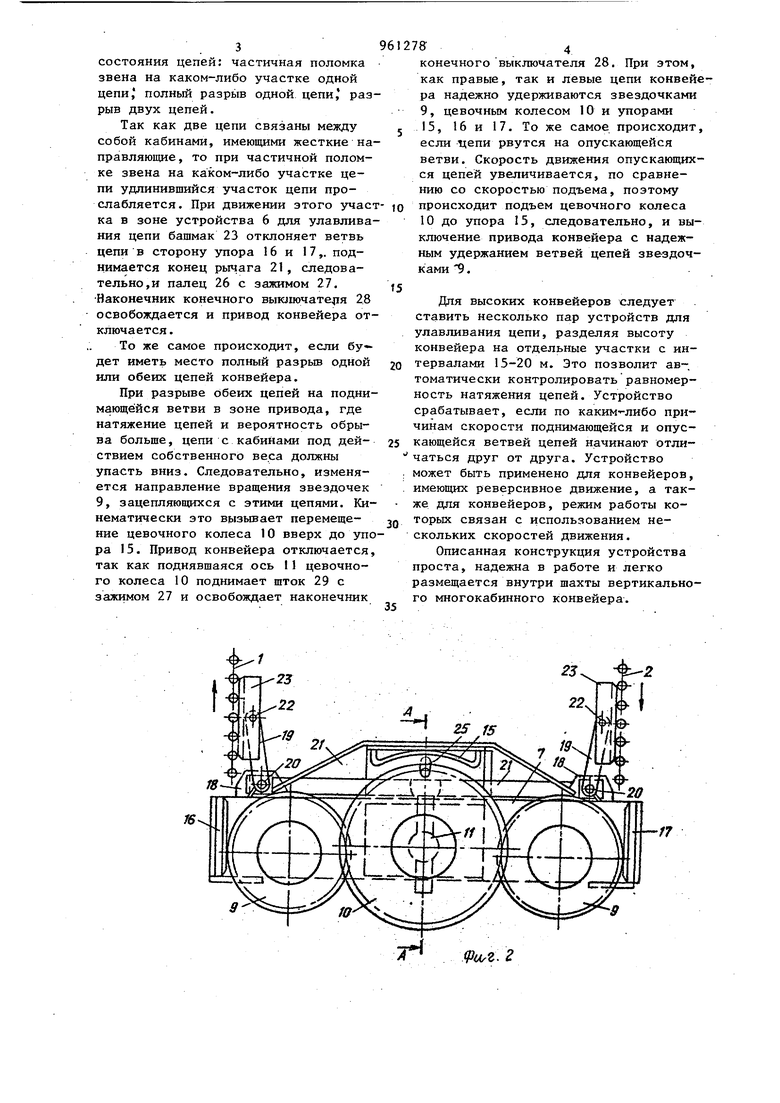
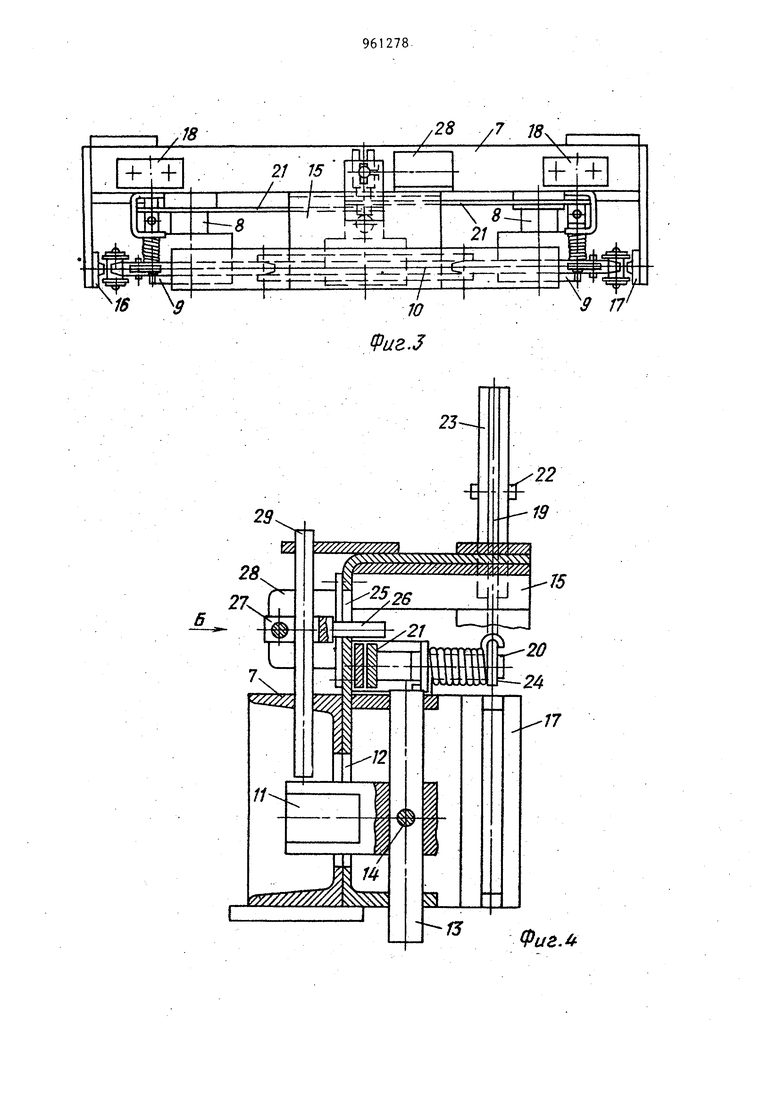
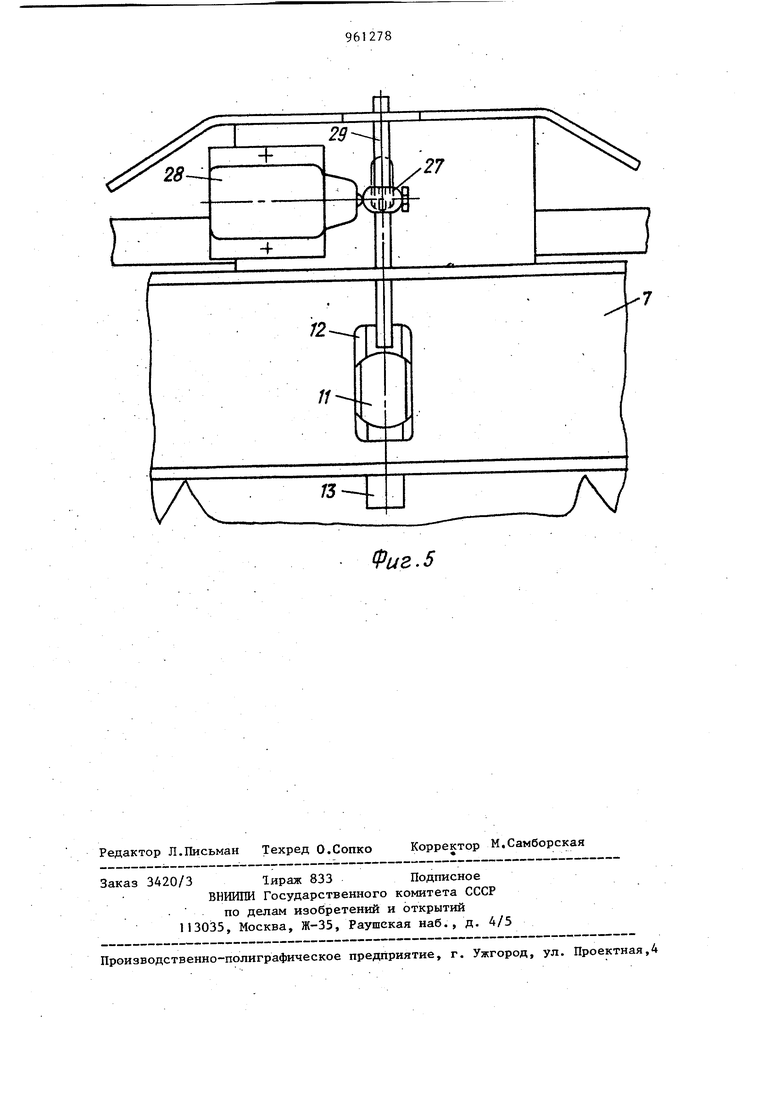
На фиг. 1 изображен общий вид вертикального конвейера с установлеными на нём устройствами для улавливания цепей на фиг. 2 - общий вид устройства-для улавливания цепей вертикального конвейера , на фиг. 3 то же, вид в плане , на фиг. А - разрез А-А на фиг. 2, на фиг. 5 - вид по стрелке Б на фиг. 4.
Многокабинный вертикальный конвейер, на котором установлены устройства для улавливания цепей в- случае
0 их обрыва, .содержит две тяговые цепи 1 и 2 с диагонально закрепленными на них кабинами 3. Цепи огибают верхние приводные 4 и нижние натяжные 5 звездочки. На каждой цепи установлено устройство для ее улавливания в случа;е обрыва. Устройство 6 для улавливания цепи имееткорпус 7, к которому на консольных осях 8 прикреплены две звездочки 9, одна из которых
0 с внешней стороны зацепляется с поднимающейся ветвью тяговой цепи, а другая - с опускающейся ветвью цепи. Звездочки 9 соединены между, собой посредством цевочного колеса 10, 5 ось 11 которого может перемещаться по вертикали относительно корпуса 7. Для этого в корпусе имеется паз 12. и отверстие для штока 13, закрепленного на оси 11 штифтом 14. ПеремёщеQ ние цевочного колеса 10 вверх ограничено упором 15. На корпусе 7 установлены упоры 16 и 17, которые ограничивают соответственно перемещение цепей 1 и 2вправо и влево. Сверху корпуса 7 симметрично расположены два кронштейна 18, на которых закреплены подпружиненные рычаги 19. На осях 20 рычагов 19 жестко установлены дополнительные рычаги 21. При этом оси 20 рычагов щарнирно закреплены в крон0штейнах 18. К верхним концам рычагов 19 с помощью шарниров 22 крепятся башмаки 23 из антифрикционного материала, опирающиеся на шарниры цепей 1 и 2. Пружины 24, связанные с рычагами 19, действуют в таком направлении, что рычаги с башмаками стремятся отклонить цепи в стороны упоров 16 и 17. В середине корпуса 7 имеется прорезь 25, в которую проходит палец 26 с зажимом 27, взаимодействующей с конечным выключателем 28. Палец крепится на штоке 29, свободно перемещающемся вверх в отверстиях корпуса 7.
55 Устройство для улавливания цепей работает следующим образом.
При работе конвейера могут возникнуть следуюпще случаи аварийного состояния цепей: частичная поломка звена на каком-либо участке одной цепи, полный разрыв одной цепи, раз рыв двух цепей. Так как две цепи связаны между собой кабинами, имеющими жесткие на правляющие, то при частичной поломке звена на каком-либо участке цепи удлинившийся участок цепи прославляется . При движении этого учас ка в зоне устройства 6 для улавлива ния цепи башмак 23 отклоняет ветвь цепи в сторону упора 16 и 17,. поднимается конец рычага 21, следовательно,и палец 26 с зажимом 27. Наконечник конечного выключате41я 28 освобождается и привод конвейера от ключается. То же самое происходит, если будет иметь место полный разрью одной или обеих цепей конвейера. При разрыве обеих цепей на подни мающейся ветви в зоне привода, где натяжение цепей и вероятность обрыва больше, цепи с кабинами под действием собственного веса должны упасть вниз. Следовательно, изменяется направление вращения звездочек 9, зацепляющихся с этими цепями. Ки нематически это вызывает перемещение цевочного колеса 10 вверх до уп ра 15. Привод конвейера отключается так как поднявшаяся ось 11 цевочного колеса 10 поднимает шток 29 с зажимом 27 и освобождает наконечник 8-4 конечного выключателя 28. При этом, как правые, так и левые цепи конвейера надежно удерживаются звездочками 9, цевочным колесом 10 и упорами 15, 16 и 17. То же самое происходит, если цепи рвутся на опускающейся ветви. Скорость движения опускающихся цепей увеличивается, по сравнению со скоростью подъема, поэтому происходит подъем цевочного колеса 10 до упора 15, следовательно, и выключение привода конвейера с надежным удержанием ветвей цепей звездочками 9. Для высоких конвейеров следует ставить несколько пар устройств для улавливания цепи, разделяя высоту конвейера на отдельные участки с интервалами 15-20 м. Это позволит ав-. томатически контролировать равномерность натяжения цепей. Устройство срабатывает, если по каким- либо причинам скорости поднимающейся и опускающейся ветвей цепей начинают отличаться друг от друга. Устройство может быть применено для конвейеров, имеющих реверсивное движение, а также для конвейеров, режим работы которых связан с использованием нескольких скоростей движения. Описанная конструкция устройства проста, надежна в работе и легко размещается внутри шахты вертикального многокабинного конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель оборванной цепи | 1989 |
|
SU1726332A1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА | 2007 |
|
RU2329941C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА И ИХ СПУСКА В КАРЬЕР | 2006 |
|
RU2305189C1 |
| Натяжное устройство вертикального многокабинного конвейера | 1977 |
|
SU946130A1 |
| КАРЬЕРНЫЙ ПОДЪЕМНИК ДЛЯ АВТОМОБИЛЕЙ-САМОСВАЛОВ | 2005 |
|
RU2287477C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА | 2005 |
|
RU2284959C1 |
| Устройство для образования попереч-НыХ шВОВ HA ТЕРМОСВАРиВАЕМыХ РуКАВАХи ОТРЕзАНия гОТОВыХ пАКЕТОВ | 1979 |
|
SU806540A1 |
| Устройство для отключения привода многоцепного скребкового конвейера | 1976 |
|
SU600045A1 |
| Конвейер для штучных грузов | 1977 |
|
SU948085A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ЦЕПЕЙ ВЕРТИКАЛЬНОГО КОНВЕЙЕРА,содержащее стопорный механизм и взаимодействующие с цепями башмаки, установленные на поворотных рычагах,имеющих оси, и конечные выключатели привода конвейера, отличающееся тем, что, с целью повышения надежности работы устройства для улавливания цепей, стопорньй механизм выполнен в виде установленных консольно на корпусе звездочек, находящихся в зацеплении с цепями конвейера и с цевочным колесом, ось которого размещена в пазу корпуса устройства с возможностью вертикального перемещения и взаимодействия с конечными выключателями, при этом на осях поворотных рычагов с башмаками установлены тяги, взаимодействующие с конечными выключателями привода конвейера. (Л со а ND 00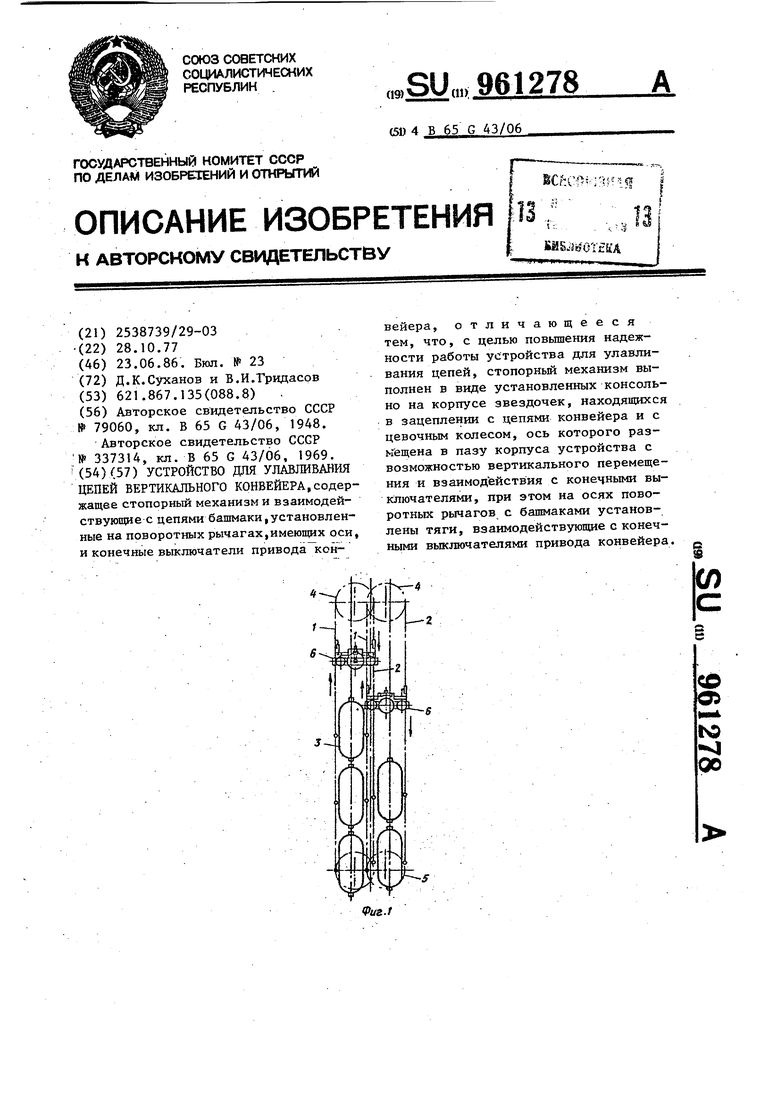
Фиг.5
| Устройство для улавливания оборвавшейся цепи конвейера | 1948 |
|
SU79060A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| АВТОМАТИЧЕСКИЙ ЛОВИТЕЛЬ ТЯГОВОГО ОРГАНАКОНВЕЙЕРА | 0 |
|
SU337314A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
