Изобретение относится к экскаваторостроению и может быть использовано на. одноковшовых экскаваторах с однобалочной рукоятью.
Известно рабочее оборудование одноковшоврго экскаватора, включающее ковш, однобалочл1ую рукоять, стрелу и седловой подашпник с боковыми вкладьв11а1 а1 скольжения и резиновыми амрртиз аторами 1. .
Недостатками этой конструкций являются низкая долговечность вкладышей и амортизаторов и значительные боковые динамические нагрузки в рабочем .оборудовании в неустановившихся ре,жимах поворота экскаватора, возникающие из-за больших боковых зазоров .между рукоятью и седловым подшипником.
Наибрлее близким к предлагаемому является седловой подшипник .экскаватора , содержащий корпусе седлом под рукоять и установленными в отверстиях корпуса пальцами с роликами на них расположенными с возможностью контактирования с рукоятью 23.
Однако большие боковые динамические нагрузки при повороте, связанные с боковыми зазорами между рукоятью и роликами в условиях линейного или точечного контакта между ними, не
позволяют обеспечить контактной и из гибной прочности роликов и рукояти, что преп;ятствует широкому внедрению такого рабочего оборудования.
Цель изобретения - повышение ,надежности и долговечности подшипника.
Указанная цель достигается тем, что в седловом подшипнике экскаватора, содержащем корпус с седлом под
10 рукоять и с установленными в отверстиях корпуса пальцами с роликами на них, расположенными с возможностью контактирования с рукоятью, каждый палец выполнен с цапфами большого и
15 меньшего диаметра, расположенными на концах пальца, причем геометрические оси каждой цапфы и пальца смещены относительно друг друга и отношение расстояния между осью цапфы меньше20го диаметра и осью пальца к ргцшусу меньшей цапфы меньше коэффициента трения псшьца в отверстии -корпуса.
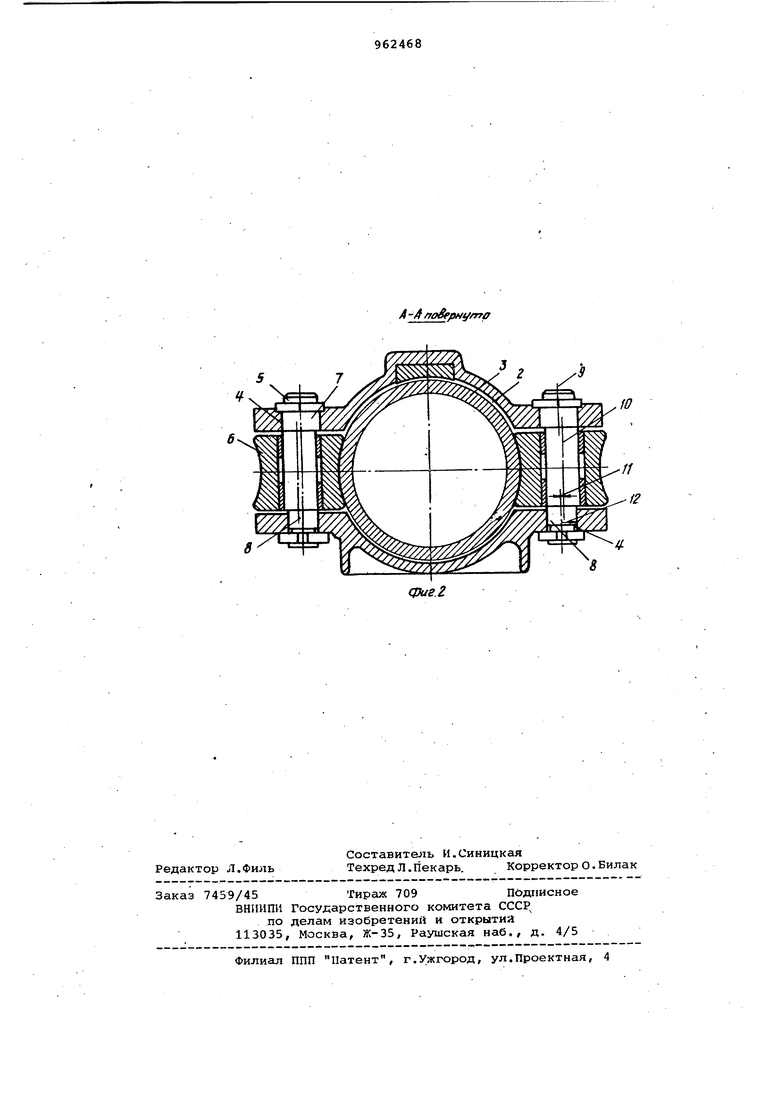
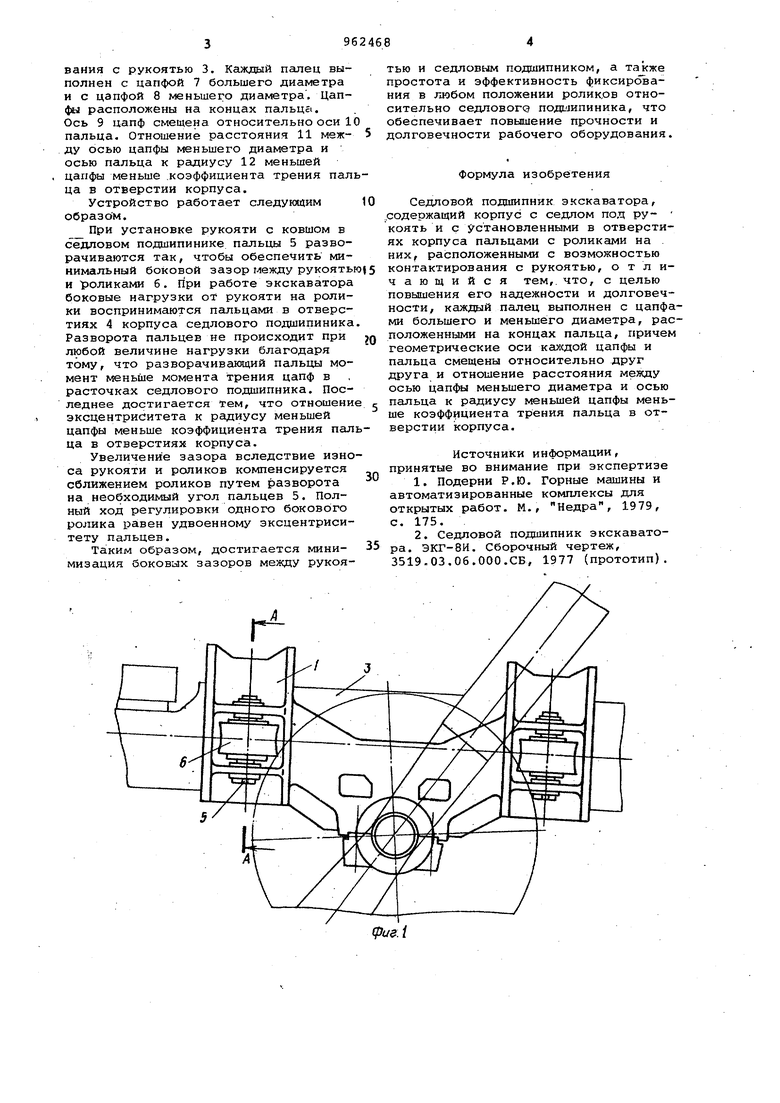
На фиг. 1 показан седловой поДшипннк; на фиг. 2 - сечение А-А на
25 фиг. 1.
Седловой подшипиник включает кор-. пус 1 с седлом 2 под рукоять 3 и установленные в отверстиях 4 корпуса пальцы 5 с роликами 6 на них, распо30ложенньши с возможностью контактирования с рукоятью 3. Каждый палец выполнен с цапфой 7 большего диаметра и с цапфой 8 меньшего диаметра . Цапфы расположены на концах пальца. Ось 9 цапф смещена относительно оси 1 пальца. Отношение расстояния 11 между осью цапфы меньшего диаметра и осью пальца к радиусу 12 меньшей цапфы меньше .коэффициента трения пал ца в отверстии корпуса. Устройство работает следующим образом. При установке рукояти с ковшом в ;ёдловом подшипинике пальцы 5 разворачиваются так, чтобы обеспечить минимальный боковой зазор между рукоять и роликами 6. При работе экскаватора боковые нагрузки от рукояти на ролики воспринимаются пальцами в отверстиях 4 корпуса седлового подшипиника Разворота пальцев не происходит при любой величине нагрузки благодаря тому, что разворачивающий пальцы момент меньше момента трения цапф в расточках седлового подшипника. Последнее достигается Тем, что отношени эксцентриситета к радиусу меньшей цапфы меньше коэффициента трения пал ца в отверстиях корпуса. Увеличение зазора вследствие изно са рукояти и роликов компенсируется сближением роликов путем разворота на необходимый угол пальцев 5. Полный ход регулировки одного бокового ролика равен удвоенному эксцентриситету Пальцев. Таким образом, достигается минимизация боковых зазоров между рукоятью и седловым подшипником, а также простота и эффективность фиксирования в любом положении роликов относительно седловогд подиипиника, что обеспечивает повышение прочности и долговечности рабочего оборудования. Формула изобретения Седловой подшипник экскаватора, содержащий корпус с седлом под ру- коять и с Установленными в отверстиях корпуса пальцами с роликами на . них, расположенными с возможностью контактирования с рукоятью, отличающийся тем,, что, с целью повышения его надежности и долговечности, каждый палец выполнен с цапфами большего и меньшего диаметра, расположенными на концах пальца, причем геометрические оси кешшой цапфы и пальца смещены относительно друг друга и отношение расстояния между осью цапфы меньшего диаметра и осью пальца к радиусу меньшей цапфы меньше коэффициента трения пальца в отверстии корпуса. Источники информации, принятые во внимание при экспертизе 1.Подерни Р.Ю. Горные машины и автоматизированные комплексы для открытых работ. М., Недра, 1979, с. 175. 2.Седловой подшипник экскаватора. ЭКГ-8И. Сборочный чертеж, 3519.03.Об.000.СБ, 1977 (прототип).
8
А -А ffo pHt/frro
х
ш
8
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| Подшипник рабочего оборудования экскаватора | 1980 |
|
SU891843A1 |
| Рабочее оборудование одноковшового экскаватора | 1978 |
|
SU994624A2 |
| Рабочее оборудование одноковшового экскаватора | 1974 |
|
SU541935A1 |
| Седловой подшипник рабочего оборудования экскаватора | 1977 |
|
SU630350A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
| Седловой подшипник для экскаватора с реечным механизмом напора | 1977 |
|
SU620540A1 |
| Рабочее оборудование экскаваторалопаты | 1981 |
|
SU987037A1 |
| Рабочее оборудование экскаватора | 1983 |
|
SU1104207A1 |