(54) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ
12
Изобретение относится к регулирующим и управляющим система1М общего назначения, вчастности к цифровым системам программного управления, и может быть использовано для управ-: ления кранами-штабелерами, лифтами, подъемниками и другиг-ш подвижными . объектами с определенным количеством пунктов адресования.
По основному авт. св. известна цифровая система программного управления, содержащая последовательно включенные преобразователь код - напряжение, блок управления обратной связи и сумматор, второй вход которого соединен с выходом блока задания программы, а выходы старших разрядов которого подключены к элементу ИЛИ, логический блок вьщеления старшего разряда, один вход которого соединен с выходом элемента ИЛИ, а другие входы которого соединены с соответствуивдими выходами младших разрядов сумматора, а выходы которого соединены с соответствующими входами преобразователя код - Напряжение.
Известная система позволяет с высокой точностью производить автоматическое управление подвижным объектом, и, при приближении к заданному
ащресу, осуществлять плавное торможение объекта путем снижения подаваемого на блок управления управляющего Напряжения.
Недостатком известной системы является отсутствие возможности ойуществлять плавный разгон объекта. Это обусловлено тем, что при пуске объекта на преобразователь код - напряже10ние с логического блока выделения старшего разряда подается старший разр/гд. кода разности текущего и заданного адресов положения подвижного объекта и на выходе преобразова15теля код - напряжение получается напряжение, соответствующее максимальной скорости перемещения объекта.
Таким образом, разгон осуществля20ется с максимально достижимым подвижным объектом ускорений. Ускорение, возникающее при разгоне, может значительно превышать допустимые для данного подвижного объекта или пере25возимого груза, что приводит к снижению надежности и срока службы объекта. Кроме того, если оператор, находится на подвижном объекте и перемещается вместе с ним, возникающее
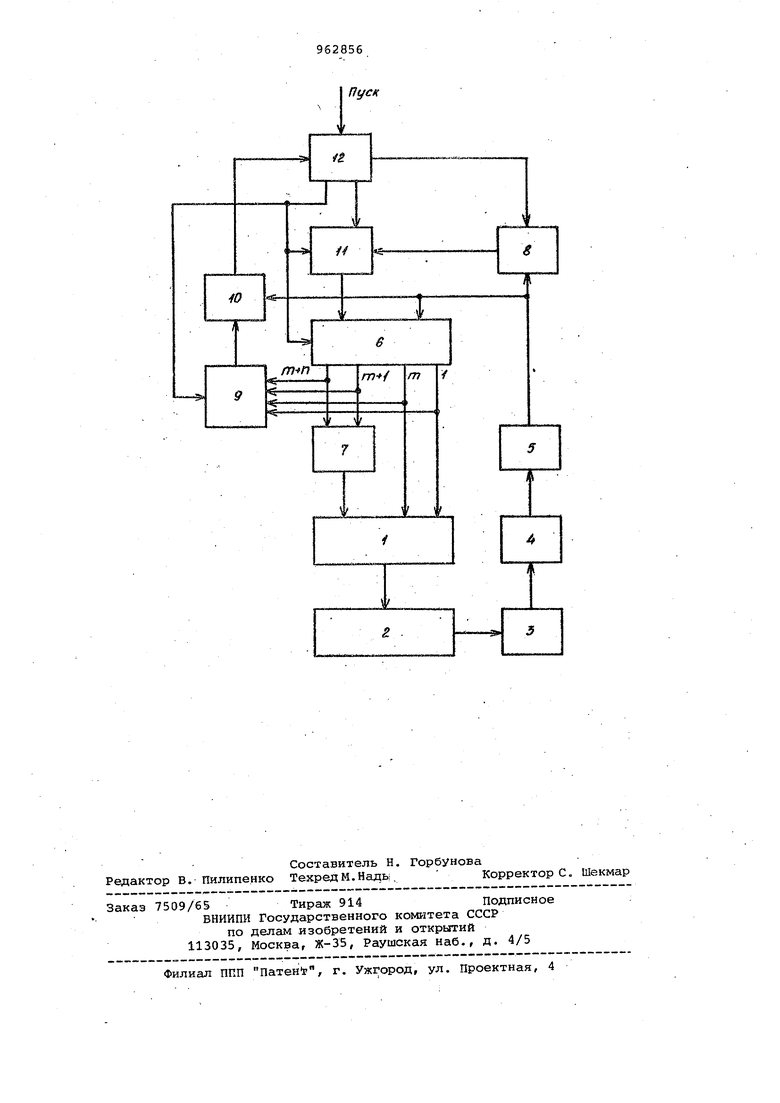
30 при разгоне ускорение может значительно превосходить допустимые для человека нормы. . Цель изобретения - расширение фун ционгшьных возможностей системы, т.е. получение возможности осуществлять Лпавный программируемый разгон подвижного объекта. Поставленная цель достигается тем, что в цифровую систему програм много управления, содержащую последовательно соединенные преобразова.тель код - напряжение, усилитель, блок управления, датчик обратной св зи и сумматор, вход которого соединен с выходом блока задания програм мы, а выходы старших разрядов сумма тора подключены к входам элемента ИЛИ, логический блок выделения стар шего разряда, один вход которого соединен с выходом элемента: ИЛИ, а другие входы соединены с соответств щими выходами младших разрядов сумматора, выходы логического блока выделения старшего разряда подключены к соо.тветствующим входам преобразователя код - напряжение, введены схема сравнения, коммутатор,буферны регистр и регистр начального ссдреса, подключенный первым входом к выходу, датчика обратной связи, вторым входом - к второму выходу блока задания программы, а выходом - к первому входу коммутатора, связанно го вторым входом с третьим выходом блока задания программы, выходом с третьим входом сумматора, а треть им входом - с первым выходом блока задания программы и с первым буферного регистра,, подключенного вторым входами к соответствующим выходам сумматора, а выходом - к первому входу схемы сравнения, соединенной вторым входом с выходом датчика обратной связи, а выходом - с входом блока задания программы. На чертеже дана блок-схема систе мы. Система содержит логический блок 1 выделения старшего разряда, преоб разователь 2 код-напряжение, усилитель 3, блок 4 управления, датчик обратной связи 5, сумматор б, элеме ИЛИ 7; регистр 8 начального адреса, буферный регистр 9, схему 10 сравне ния, коммутатор 11, блок 12 задания программы. Система работает следуквдим образом. После набора заданного адреса и подачи команды Пуск с блока 12 задания программы на регистр началь ного адреса подается команда, по ко торой в регистр 8 начального адреса записывается с датчика 5 обратной связи код начального адреса объекта По второй команде, поступающей с блока 12 задания прогрг1ммы на кся«1мутатор 11, сумматор 6 и буферны регистр 9, на входы сумматора 6 подаются значения кода начального адреса Ад с датчика 5 обратной связи и, с блока 12 задания программы через коммутатор 11, значения кода заданного адреса В. Сформированный в сумматоре 6 код адреса с пути (-2.) записывается и хранится в буферном регистре 9. После этого, блок 12 задания программы выдает команду, по которой на вход сумматора 6 через коммутатор 11 подается значение кода начального адреса .АО с регистра 8 начального адреса. На выходе сумматора 7 формируется разность кода текущего адреса А с датчика 5 обратной связи и кода начального адреса АО с регистра 8 начального адреса и к полученной разности прибавляется единица: АО + 1. Так как в момент начала движения кода текущего начального адресов равны, на вход преобразователя 2 код - напряжение через логический блок 1 выделения старшего разряда подается сформированный на сумматоре 6 младший разряд кода разности. Преобразователь 2 код - напряжение через усилитель 3 выдает напряжение, .соответствующее минимгшьной скорости перемещением объекта. На блок 4 управления, перемещающий объект. При движении объекта код текущего адреса, подаваемый на вход сумматора 6 с датчика 5 обратной связи, меняется, а разность кодов, подаваемая с выхода сумматора 6 через логический блок 1 вьщеления старшего разряда на вход преобразователя 2 код - напряжение, увеличивается, В результате преобразователь 2 код напряжение поочередно выдает через усилитель 3 на блок 4 управления возрастающее напряжение, образующие гистограмму закона разгона устройства. ; Разгон устройства продолжается до тех пор, пока в коде разности текущего и начального адресов не появляется m + 1 разряд. Так как разрядаа с т+1 по m+n подаются на логический блок 1 ввделения старшего разряда через элемент ИЛИ 7, напряжение на выходе преобразователя 2 код - напряжение при наличии любого из этих разрядов становится максимальным. При этом устройство двигается с постоянной максимальной скоростью. В схеме 10 сравнения производится сравнение кода адреса середины пути, хранимого в буферном регистре 9 и кода текущего адреса, поступающего с датчика 5 обратной связи.
При совпадении э.тих кодов схема 10 сравнения вырабатывает сигнал, подаваемый на блок 12 задания проrpciMMH. По этому сигналу блок 12 зад ния программы выдает команду на коммутатор 11 г сумматор 6. По этой команде коммутатор 11 переключается и на третий вход сумматора 6 с блока 12 задания программы подается код заданного адреса. Сумматор 6 формирует код разности заданного и текущего адресов.
При наличии в полученном коде разности разрядов, больших т, устройство продолжает двигаться с постоянной максимальной скоростью, так как указанные разряды подаются с сумматора б на логический блок 1 выделения старшего разряда через элемент ИЛИ 7. При дальнейшем движении объекта код разности заданного и текущего адресов уменьшается. Как только в нем остается т младших разрядов, начинается торможение объекта. Логический блок 1 вьщеления старшего разряда поочередно выдает старшие разряды разности адресов на преобразователь 2 код-напряжение, который поочередно выдает заданные напряжения, образующие гистограмму . закона торможения объекта.
.Таким образом, указанная совокупность, признаков позволяет расширить функционс1льные возможности системы, т.е. осуществлять плавный прогргшодаруемый разгон подвижного объекта.
что повышает качество работы подвижного объекта.
По сравнению с известными устройётвами предлагаемая цифровая система программного управления позволяет избежать при разгоне перегрузок подвижного объекта, действующих на груз и оператора, что в конечном счете ведет к расширению области применения устройства.
Формула изобретения
Цифровая система программного .управления по авт. св. 624210, отличающаяся тем, что,
с целью расширения функциональньис возможностей, в нее введены схема сравнения, коммутатор, буферный - регистр и регистр начального адреса, ,подклю; енный первым входом к выходу
датчика обратной связи, вторым входом - к второму выходу блока задания программы, а выходом - к первому входу Коммутатора, связанного вторым входом с третьим выходом блока задания программы, выходом - с третьим . {входом cyNMaTopa, а третьим входом с -первым выходом блока задания программы и с первъал входом буферного регистра, подключенного вторыми входами к соответствуюйр1м выходам сумматора, а выходом - к первому входу схемы сравнения, соединенной вторым входом с выходом датчика обратной связи, а выходом - с входом блока задания программы.
Пуск
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1983 |
|
SU1087960A1 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| МИКРОПРОЦЕССОР ВВОДА-ВЫВОДА ИНФОРМАЦИИ | 1992 |
|
RU2042182C1 |
| Цифровая система программного управления | 1980 |
|
SU924673A1 |
| Цифровая система программного управления | 1980 |
|
SU888074A1 |
| Многокоординатное устройство для управления | 1987 |
|
SU1522155A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |