и
(Л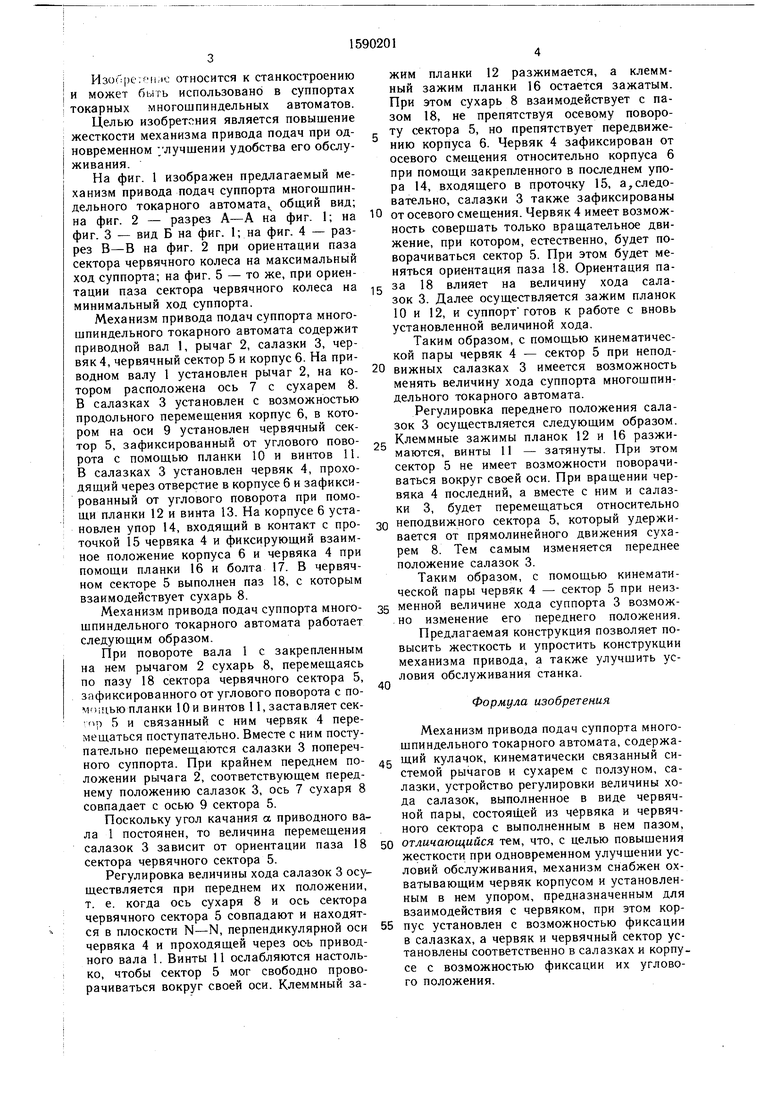
| название | год | авторы | номер документа |
|---|---|---|---|
| Суппорт токарного многошпиндельного автомата | 1980 |
|
SU965600A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1996 |
|
RU2103114C1 |
| Многошпиндельный токарный станок | 1989 |
|
SU1720801A1 |
| Многошпиндельный токарный станок | 1984 |
|
SU1155363A1 |
| Токарный автомат | 1976 |
|
SU607536A3 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ ГЛУБИНЫ РЕЗАНИЯ НА ТОКАРНО-ВИНТОРЕЗНОМ СТАНКЕ | 2009 |
|
RU2417866C2 |
| Токарно-револьверный автомат | 1974 |
|
SU663487A1 |
| Токарный автомат | 1982 |
|
SU1041223A1 |
| Многопшиндельный автомат | 1938 |
|
SU63078A1 |
| МЕХАНИЗМ ПРИВОДА ПОДАЧИ СУППОРТА ТОКАРНОГО АВТОМАТА | 1970 |
|
SU282009A1 |
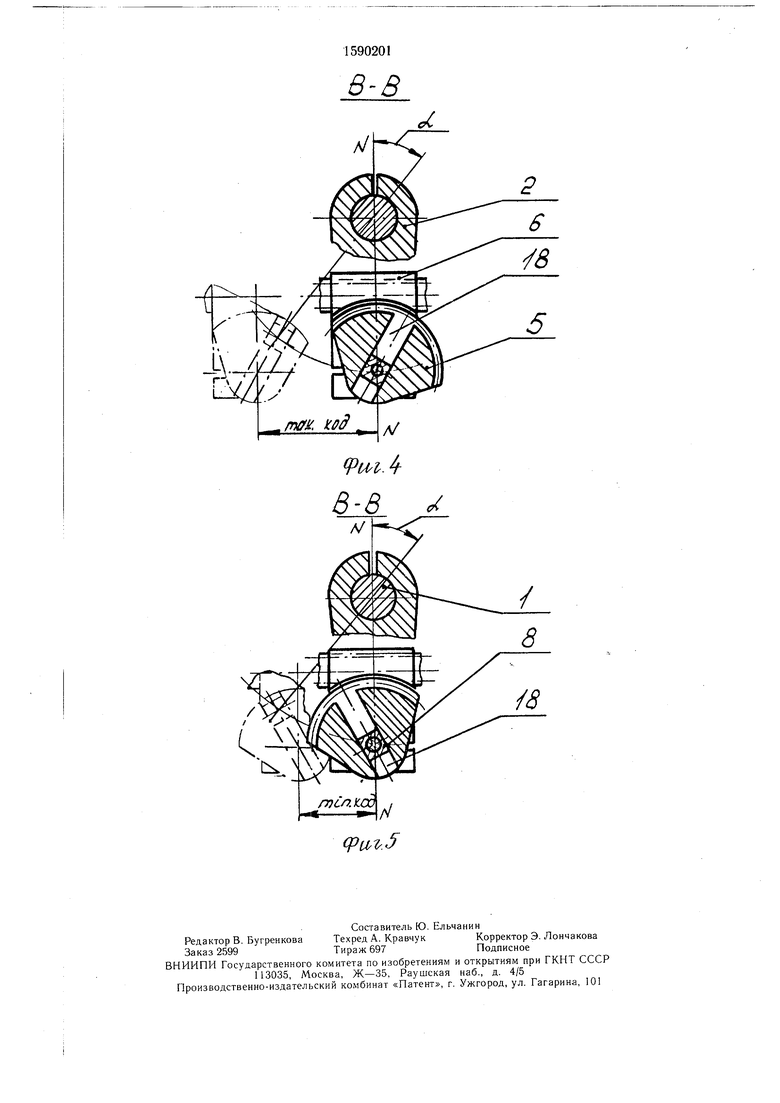
Изобретение относится к станкостроению и может быть использовано в суппортах многошпиндельных станков. Целью изобретения является повышение жесткости механизма при одновременном улучшении условий обслуживания. Механизм привода подач суппорта включает приводной вал 1, рычаг 2, червячную пару - червяк 4, установленный в суппорте, и сектор 5, установленный в корпусе 6, который фиксируется в салазках 3. При регулировке хода салазок угловые положения червяка 4 и сектора 5 фиксируются. 5 ил.
fj
ел
;о о ю
Изоо|)е:еи.1е относится к станкостроению и может быть использовано в суппортах токарных многошпиндельных автоматов. Целью изобретения является повышение жесткости механизма привода подач при одновременном улучшении удобства его обслуживания.
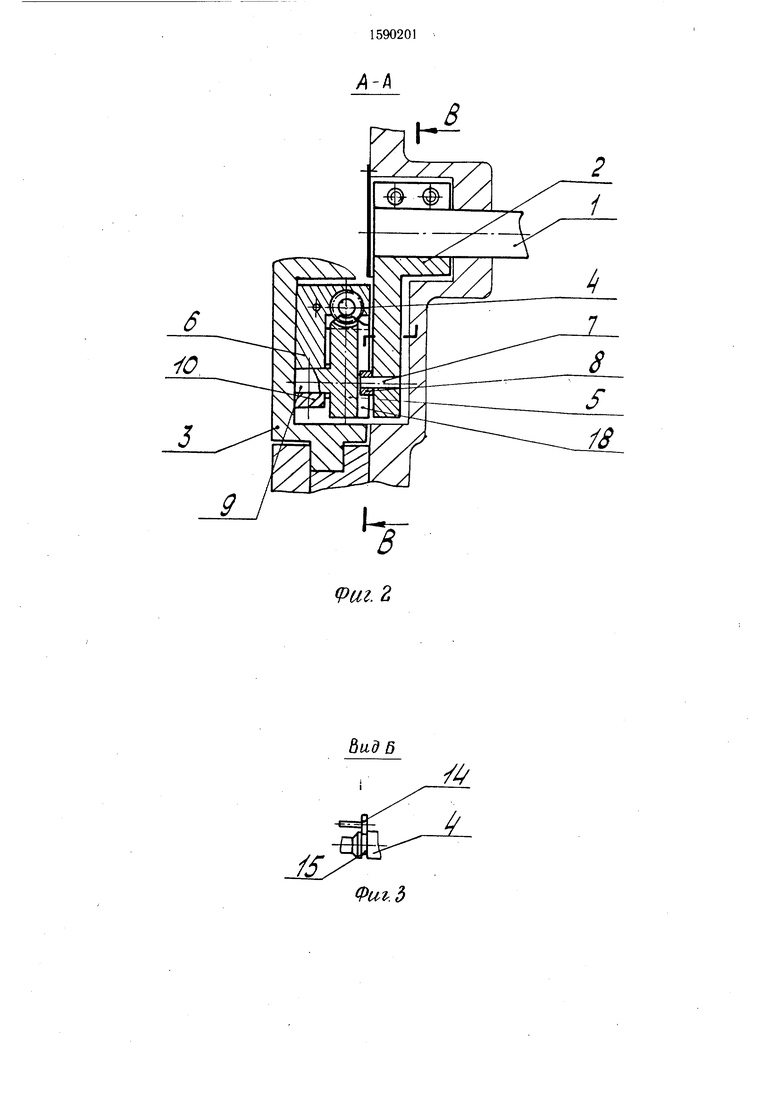
На фиг. 1 изображен предлагаемый механизм привода подач суппорта много шпин- дельного токарного автомата общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 2 при ориентации паза сектора червячного колеса на максимальный ход суппорта; на фиг. 5 - то же, при ориентации паза сектора червячного колеса на минимальный ход суппорта.
Механизм привода подач суппорта многошпиндельного токарного автомата содержит приводной вал 1, рычаг 2, салазки 3, червяк 4, червячный сектор 5 и корпус 6. На приводном валу 1 установлен рычаг 2, на котором расположена ось 7 с сухарем 8. В салазках 3 установлен с возможностью продольного перемещения корпус 6, в котором на оси 9 установлен червячный сектор 5, зафиксированный от углового поворота с помощью планки 10 и винтов 11. В салазках 3 установлен червяк 4, проходящий через отверстие в корпусе 6 и зафиксированный от углового поворота при помощи планки 12 и винта 13. На корпусе 6 установлен упор 14, входящий в контакт с проточкой 15 червяка 4 и фиксирующий взаимное положение корпуса 6 и червяка 4 при помощи планки 16 и болта 17. В червячном секторе 5 выполнен паз 18, с которым взаимодействует сухарь 8.
Механизм привода подач суппорта много- щпиндельного токарного автомата работает следующим образом.
При повороте вала 1 с закрепленным на нем рычагом 2 сухарь 8, перемещаясь по пазу 18 сектора червячного сектора 5, зафиксированного от углового поворота с помощью планки 10 и винтов 11,заставляетсек- пр 5 и связанный с ним червяк 4 перемещаться поступательно. Вместе с ним поступательно перемещаются салазки 3 попереч15
20
жим планки 12 разжимается, а клемм- ный зажим планки 16 остается зажатым. При этом сухарь 8 взаимодействует с пазом 18, не препятствуя осевому повороту сектора 5, но препятствует передвиже- нию корпуса 6. Червяк 4 зафиксирован от осевого смещения относительно корпуса 6 при помощи закрепленного в последнем упора 14, входящего в проточку 15, а ..следовательно, салазки 3 также зафиксированы 10 от осевого смещения. Червяк 4 имеет возможность соверщать только вращательное движение, при котором, естественно, будет поворачиваться сектор 5. При этом будет меняться ориентация паза 18. Ориентация паза 18 влияет на величину хода салазок 3. Далее осуществляется зажим планок 10 и 12, и суппорт готов к работе с вновь установленной величиной хода.
Таким образом, с помощью кинематической пары червяк 4 - сектор 5 при неподвижных салазках 3 имеется возможность менять величину хода суппорта многошпиндельного токарного автомата.
Регулировка переднего положения салазок 3 осуществляется следующим образом. Клеммные зажимы планок 12 и 16 разжимаются, винты 11 - затянуты. При этом сектор 5 не имеет возможности поворачиваться вокруг своей оси. При вращении червяка 4 последний, а вместе с ним и салазки 3, будет перемещаться относительно 30 неподвижного сектора 5, который удерживается от прямолинейного движения сухарем 8. Тем самым изменяется переднее положение салазок 3.
Таким образом, с помощью кинематической пары червяк 4 - сектор 5 при неиз- 35 менной величине хода суппорта 3 возможно изменение его переднего положения. Предлагаемая конструкция позволяет повысить жесткость и упростить конструкции механизма привода, а также улучшить условия обслуживания станка.
25
40
Формула изобретения
Механизм привода подач суппорта многошпиндельного токарного автомата, содержан го суппорУаГПри крайнем переднем по- 45 « кулачок, са ложении оь1чага 2 соответствующем перед-стемой рычагов и сухарем с ползуном, санему поло жению 3, ось 7 сухаря 8лазки, устройство регулировки величины хогпйпяпярт г осью 9 сектооа 5Да салазок, выполненное в виде червяч ТоГколь угол кГчГя а приводного ва- ной пары, состояО ей из червяка и червяч ного сектора с выполненным в нем пазом,
50 отличающийся тем, что, с целью повышения жесткости при одновременном улучшении условий обслуживания, механизм снабжен охватывающим червяк корпусом и установленным в нем упором, предназначенным для взаимодействия с червяком, при этом кор- 55
ла 1 постоянен, то величина перемещения салазок 3 зависит от ориентации паза 18 сектора червячного сектора 5.
Регулировка величины хода салазок 3 осуществляется при переднем их положении, т. е. когда ось сухаря 8 и ось сектора червячного сектора 5 совпадают и находятся в плоскости N-N, перпендикулярной оси червяка 4 и проходящей через ооь приводного вала 1. Винты 11 ослабляются настолько, чтобы сектор 5 мог свободно проворачиваться вокруг своей оси. Клеммный запус установлен с возможностью фиксации в салазках, а червяк и червячный сектор установлены соответственно в салазках и корпу се с возможностью фиксации их углового положения.
5
0
жим планки 12 разжимается, а клемм- ный зажим планки 16 остается зажатым. При этом сухарь 8 взаимодействует с пазом 18, не препятствуя осевому повороту сектора 5, но препятствует передвиже- нию корпуса 6. Червяк 4 зафиксирован от осевого смещения относительно корпуса 6 при помощи закрепленного в последнем упора 14, входящего в проточку 15, а ..следовательно, салазки 3 также зафиксированы 0 от осевого смещения. Червяк 4 имеет возможность соверщать только вращательное движение, при котором, естественно, будет поворачиваться сектор 5. При этом будет меняться ориентация паза 18. Ориентация паза 18 влияет на величину хода салазок 3. Далее осуществляется зажим планок 10 и 12, и суппорт готов к работе с вновь установленной величиной хода.
Таким образом, с помощью кинематической пары червяк 4 - сектор 5 при неподвижных салазках 3 имеется возможность менять величину хода суппорта многошпиндельного токарного автомата.
Регулировка переднего положения салазок 3 осуществляется следующим образом. Клеммные зажимы планок 12 и 16 разжимаются, винты 11 - затянуты. При этом сектор 5 не имеет возможности поворачиваться вокруг своей оси. При вращении червяка 4 последний, а вместе с ним и салазки 3, будет перемещаться относительно 30 неподвижного сектора 5, который удерживается от прямолинейного движения сухарем 8. Тем самым изменяется переднее положение салазок 3.
Таким образом, с помощью кинематической пары червяк 4 - сектор 5 при неиз- 35 менной величине хода суппорта 3 возможно изменение его переднего положения. Предлагаемая конструкция позволяет повысить жесткость и упростить конструкции механизма привода, а также улучшить условия обслуживания станка.
5
40
Формула изобретения
Механизм привода подач суппорта многошпиндельного токарного автомата, содержа45 « кулачок, са стемой рычагов и сухарем с ползуном, саотличающийся тем, что, с целью повышения жесткости при одновременном улучшении условий обслуживания, механизм снабжен охватывающим червяк корпусом и установленным в нем упором, предназначенным для взаимодействия с червяком, при этом кор-
пус установлен с возможностью фиксации в салазках, а червяк и червячный сектор установлены соответственно в салазках и корпусе с возможностью фиксации их углового положения.
дид б
Фиг.Ь
в-в
| МЕХАНИЗМ ПРИВОДА ПОДАЧИ СУППОРТА ТОКАРНОГОАВТОМАТА | 0 |
|
SU193883A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
