(5) УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИЖЕНИЯМИ ПОДВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шлифования колец | 1983 |
|
SU1093490A1 |
| Станок для нанесения граней на стеклоизделия | 1983 |
|
SU1106640A1 |
| Автомат для вышлифовки винтовых поверхностей и заточки зубьев на цилиндрической поверхности и торце концевого инструмента | 1984 |
|
SU1172678A1 |
| Трубоотрезной станок | 1985 |
|
SU1296320A1 |
| ЗАТОЧНЫЙ СТАНОК ДЛЯ ЛЕНТОЧНЫХ ПИЛ | 1966 |
|
SU186833A1 |
| Полуавтомат для заточки мелкомодульного многолезвийного инструмента | 1968 |
|
SU301030A1 |
| МЕХАНИЗМ ПОПЕРЕЧНОЙ ПОДАЧИ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА | 1972 |
|
SU347183A1 |
| Машина для тяжки и разбивки меховых шкурок | 1975 |
|
SU519473A1 |
| СТАНОК ДЛЯ ШЕВИНГОВАНИЯ - ПРИКАТЫВАНИЯ ЗУБЧАТЫХ КОЛЕС | 1992 |
|
RU2068754C1 |
| Механизм подач | 1985 |
|
SU1292996A1 |
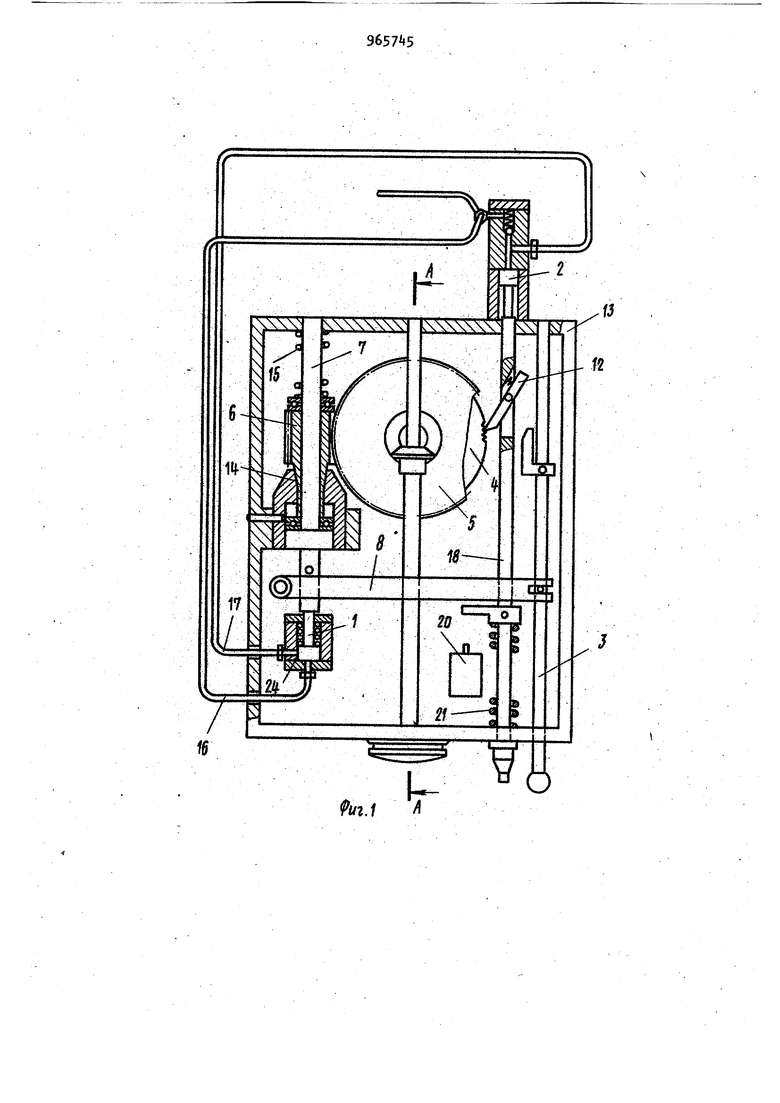
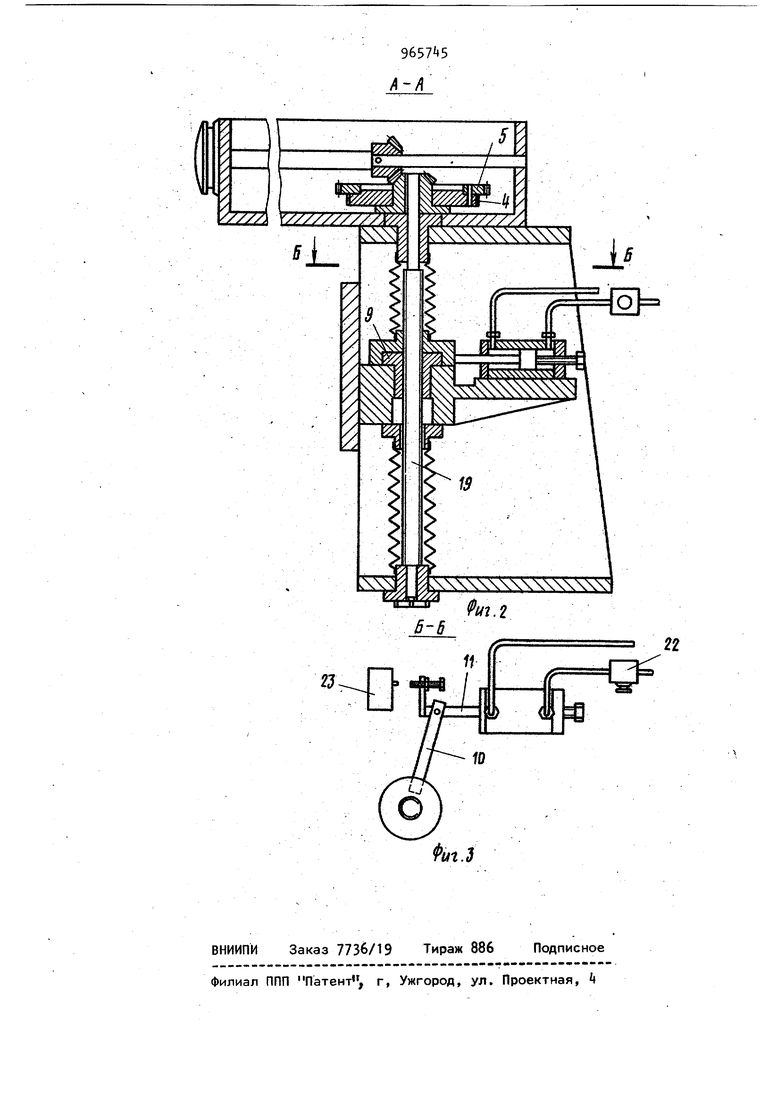
. I. , . Изобретение относится к управлению движениями подвода для профилирования профильных шлифовальных кругов алмазным роликом с приводом от двигателя. Известны устройства, в которых с помощью узла собачка-храповое колесо ходовым винтом алмазные ролики подводятся к абразивному кругу. Такие устройства частично оснащены гидравлическим устройством ускорённогр перемещения для подвода и отвода алмазного ролика. Однако в большинстве случаев ско Iрость подвода слишком большая и, по . этому, на алмазный .ролик действует большая нагрузка, что отрицательно влияет на его срок службы. Кроме то го, гидравлическое устройство ускоренного перемещения требует установ ки дополнительной каретки. Известно также устройство, в ко тором механизм подвода состоит, из храпового механизма с поршневым приводом поступательного движения и из пружины отводи. При таком решении можно смещать несколько кареток независимо друг от другэ, но перемещение алмазного ролика может осуществляться только прерывисто и возможно только одно такое движение. Целью изобретения язляется обеспечение возможности управления движениями подвода для профилирования шлифовальных кругов алмазным роликом, приводимым от двигателя с обеспечением при применении простых средств, прежде всего, реализации бережной нагрузки на профильный алмазный ролик. Устройства, оснащенные алмазными роликами, частично имеют гидравлическое ускоренное перем.ещение для подвода и отвода алмазного ролика. Для прецизионной правки профильных шлифовальных кругов скорость поперечной каретки слишком большая, что может -ebtSHBaTb большой износ алмазного доли ка. Для реализаци ускоренного перемеи(ения ранее известные уст ройства, оснащены дополнительной кареткой. Для устранения таких недостатков в основу изобретения положена задача создать устройство для. управления , движением подвода алмазного ролика с приводом от электродвигателя, cor стоящего из каретки с винтовым приводом, маточная гайка которой может приводиться гидравлическим поршневы приводом поступательного движения и ходовой винт может приводиться от блока собачка-храповое колесо, котоI рое с применением простых средств ре лизует бережную для алмазного ролика небольшую скорость подвода, а также выполняет подвод и ртвЬд алмазного ролика без дополнительной каретки. Согласно изобретению 3iTo достигается тем, что жестко ;вязанное с Храповым колесом винтовое колесо при-25 водит в действие косозубое зубчатое колесо, на котором находится тормоз,нЬй конус, у которого с помощью гид.равлического цилиндра соосно перемещается шток и действующая в обратном направлении пружина сжатия. Кроме того, имеется.тяга управления с рычагом в соединении с держащим винтовое колесо штокрм, а маточная гайка связана рычаге ,с еще одним поршневым приводом поступательного движения. Тем самым данным устройством дости гается то, что либо Тормоз ходового виНта отпускается рабочей жидкостью еще до наложения нагрузки на привод ходового винта, либо до срабатывания привода маточной гайки ходовой винт снова тормозится без изменения направления вращения. В связи с применением обратного Дроссельного клапана,.возможно очень медленное движение подвода каретки, но и быстрый возврат маточной гайки в исходное положение, а так же обеспечено как бережное применение, так и быстрый отвод правящего ролнка. На фиг. 1 показано устройство, общий ёид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2. Устройство оснащено гидравлическим цилиндром 1, который при подаче 5 : 4 рабочей жид1(ости через магистраль 16 отпускает тормозной конус 1, затем открывает путь для поступления рабочей жидкости через магистраль 17 к другому гидравлическому цилиндру 2. Гидроцилиндр 2 со своей стороны вызывает смещение тяги управления 18 с собачкой 12, вращающейся на оси, причем одновременно приводится в действие храповое колесо, находящееся на ходовом винте 19. Храповое колесо Ц приводит в движение ходовой винт 19 и тем самым подводит каретку. Гидроцилиндр 2 после подвода каретки может возвращаться в исходное положение по оси с помощью нажимной пружины 21. Находящееся на ходовом винте 19, храповое колесо k с собачкой 12 приводит через жестко сопряженное с ним винтовое колесо 5 косозубое колесо б во вращательное движение, примем косозубое колесо ( у своего переднего конца имеет тормозной конус 14. Этот тормозной конус отпускается в осевом направлении гидроцилиндром 1, причем после снятия давления подвода; с гидроцилиндра 1, смещающаяся в осевом направлении пружина 15, тормозит косозубое колесо 6 с тормозным КОНУСОМ 1 без изменения направления вращения. Винтовое колесо 5 жестко соединенное с храповым колесом it, находится в кинематической связи с косозубым колесом 6, причем косозубое колесо 6 с тормозным конусом k передвигается на штоке 7 и связано с гидроцилиндром 1. Устройство оснащено еще маточной гайкой 9 которая связана через рычаг 10с поршневым приводом поступательного движения, причем маточная гайка 9 поддерживается, с одной стороны, расположением поршневого привода поступательного движения 11, и подвод каретки осуществляется только через ходовой винт 19 с собачкой 12, и, с другой стороны, один Поворот маточной гайки 9 поршневым приводом 11 реализует дополнительное движение подачи каретКи с небольшой скоростью, причём Ходовой винт 19 придерживается косозубым колесом 6 с тормозным конусом 14. Принцип действия устройства состоит в следующем. При подаче рабочей жидкости в магистраль 16 посредством гидроцилиндра 1 и штока 7 отпускается тормозной 5965 конус 14. После этого ги)цроцилиндр 1 освобождает магистраль 17 и через гидроцилиндр 2 реализуется смещение штока 18. При этом собачкой 12 вращается храповое колесо А и вместе с ним ходовой винт 19, маточная гайка 9 придерживается поршневым приводом поступательного движения 11. Так реализуется игаг подвода, завершение которого сигнализируется конеч- Ю ным выключателем 20. Зтот сигнал вызывает переклочени0 гидросистемы, в результате чего магистрали 16 и 17 становятся безнапорными. Работающая в осевом направлении пружина 15 через тормозной конус И косозубого колеса 6 в соединении с винтовым колесом 5 вызывает торможение ходового винта 19. Одновременно шток 18 с собачкой 12 возвращается пружиной 21 в исходное положение. С помощью поршневого привода 11 и рычага 10 маточная гайка 9 поворачивается на постоянную величину. Благодаря обратному дроссельному клапану 22 возможно реалг13овать очень медленное движение поршневого привода 11 и таким образом добиться очень медленного движения подачи с постоянным параметром хода. После срабатывания конечного выключателя 23 происходит переключение гидросистемы и, в связи с срабатыванием обратного дросселя 22 быстрый возврат поршневого привода 11 и тем самым быстрый- возврат маточной гайки 9 в исходное положение, причем обеспечено быстрое движение отвода правильного ролика. 5 Формула изоЬретения 1. Устройство для управления.движениями подвода для профилирования профильных шлифовальных кругов алмазным роликом, приводимым от двигателя, состоящее из приводимой от винтового привода каретки, маточная гайка которого, с одной стороны, приводится OiT гидравлического поршневого привода и, с другой стороны, ходовой винт приводится от блока собачка-храповое ко-. лесо, отяи чающееся тем, что жестко соединенное с храповым колесом Ц винтовое колесо 5 приводит в движение косозубое колесо 6, которое имеет тормозной конус I, и это колесо установлено с возможностью перемещения с помощью гидроцилиндра 1 соосно со штоком 7 и с помощыб пружины 13 в обратном направлении. 2.Устройство по п. 1, о т л и чающееся тем, что тяга управления 3. с рычагом 8 расположёна с возможностью взаимодействия со штоком 7, несущим косозубое колесо. л . 3.Устройство по пп. 1 и 2, о т л и чающееся тем, что маточная гайка 9 соединена через рычаг 10, с поршневым приводом поступательного движения 11. Признано изобретением по результатам- экспертизы, осуществленной ведомством по изобретательству Германе-; кой Демократической Республики.
