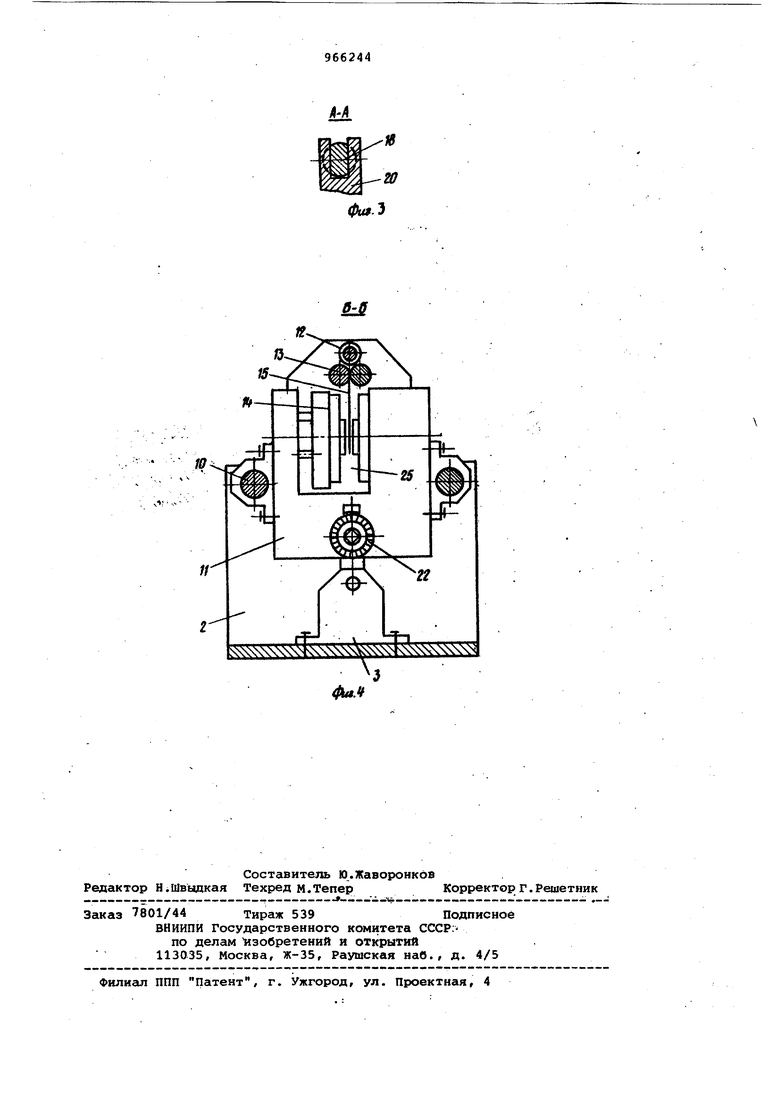
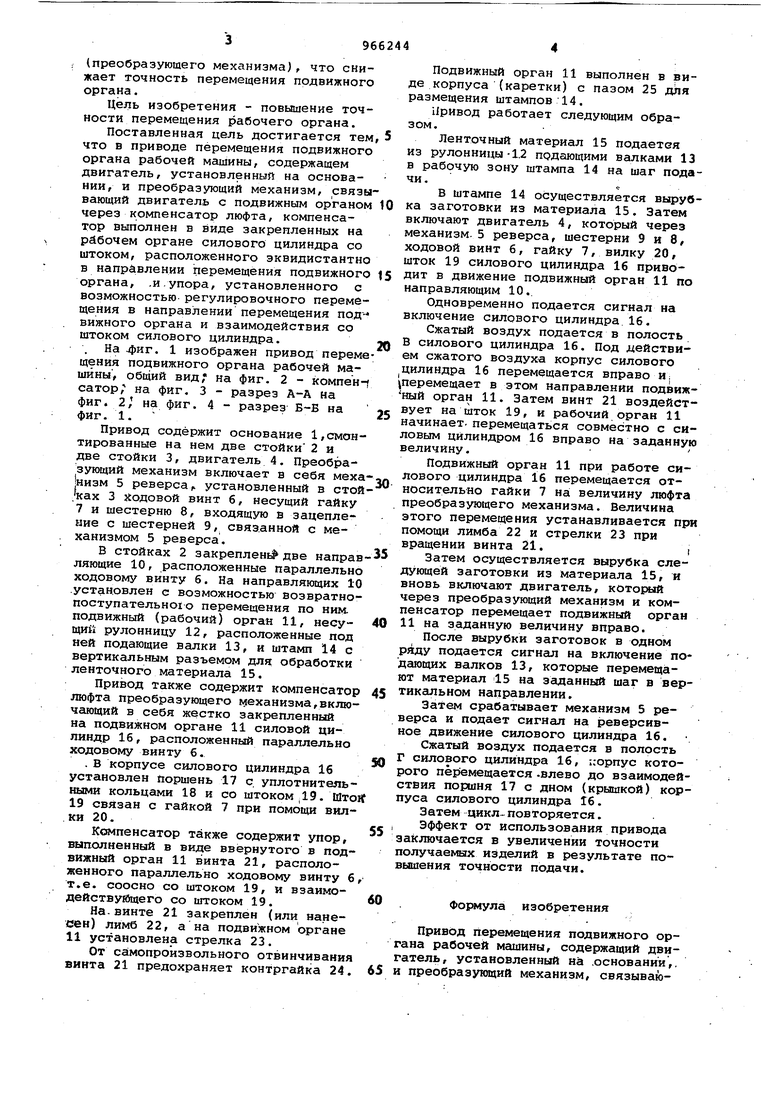
(54) ПРИВОД ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОРГАНА Изобретение относится к машиностроению, в частности кузнечно-прессовому оборудований, и может быть иапользовано для перемещения подвижного органа рабочей машины. Известен привод перемещения подвижного органа рабочей машины материала, содержащий основание, установ ленный на нем с возможностью возврат но-тпоступательного перемещения рабочий орган, связанный через преобразующий механизм.и Компенсатор с приводом. Преобразующий механизм выполнен в виде приводного вала, несущего кулачок, зубчатого сектора свобод но установленного на оси и входящего в зацепление с зубчатой рейкой, закрепленной на рабочем органе. Компенсатор выполнен в виде двух свободно установленных на оси зубчатого сектора рычагов, свободные концы которых подпружинены друг относительно друга и между ними расположены два пальца. Один из пальцев закреплен на зубчатом секторе, а другой смонтирован на одном из концов третьего рычага, жестко закрепленного другим концом на оси. Рабочий орган перемещается между регулируеРАБОЧЕЙ МАШИНЫ мыми упорами, установленными на осГ- новании LIJ. В известном приводе компенсация зазоров (люфта) в кинематической цепи осуществляется за счет того,что ход кулачка больше хода рабочего органа , что приводит к увеличению габаритов привода. Наиболее близок к изобретению привод перемещения подвижного органа рабочей машины, содержащий подвижный (рабочий) орган, выполненный в виде подающих валков, связанных через преобразующий механизм, и компенсатор люфта с двигателем. Преобразующий механизм содержит вал, связанный через цепную передачу с приводом и несущий кулачок, связанный с одним из .н.ожей рабочей машины, и шестерню, входящуюв зацепление с шестерней, связанной с подающими валками. На валу установлен компенсатор, выполненный в виде зубчатого сектора, связанного с шестерней с возможностью регулировочного поворота и входящего в зацепление с шестерней, связанной с подающими валками 2j. Однако в известном приводе компенсация люфта (зазора) обеспечивается . только в части кинематической цепи (преобразующего механизма), что снижает точность перемещения подвижного органа. Цель изобретения - повышение точности перемещения рабочего органа. Поставленная цель достигается тем что в приводе перемещения подвижного органа рабочей машины, содержащем двигатель, установленный на основании, и преобразующий механизм, связы вающий двигатель с подвижным органом через компенсатор люфта, компенсатор выполнен в виде закрепленных на рабочем органе силового цилиндра со штоком, расположенного эквидистантно в направлении перемещения подвижного органа, -И,упора, установленного с возможностью- регулировочного перемещения в направлении перемещения под- вижного органа и взаимодействия со штоком силового цилиндра. На jjwr. 1 изображен привод переме щения подвижного органа рабочей машины, общий вид; на фиг. 2 - компенсатор; на фиг. 3 - разрез А-А на фиг. 2, на фиг. 4 - разрез Б-Б на фиг. 1. Привод содержит основание 1,смонтированные на нем две стойки 2 и две стойки 3, двигатель 4. Преобразующий механизм включает в себя меха низм 5 реверса , установленный в стой /ках 3 Кодовой винт б, несущий гайку 7 и шестерню 8, входящую в зацепление с шестерней 9, связанной с механизмом 5 реверса. В стойках 2 закреплень две направ ляющие 10, расположенные параллельно ходовому винту б. На направляющих 10 .установлен с возможностью возвратнопоступательного перемещения по нимподвижный (рабочий) орган 11, несущий рулонницу 12, расположенные под ней подающие валки 13, и штамп 14 с вертикальным разъемом для обработки ленточного материала 15. Привод также содержит компенсатор люфта преобразующего механизма,включающий в себя жестко закрепленный на подвижном органе 11 силовой цилиндр 16, расположенный параллельно ходовому винту 6. . В корпусе силового цилиндра 16 установлен поршень 17 с уплотнитеяьными кольцс1ми 18 и со штоком jl9. IflTo 19 связан с гайкой 7 при помощи вилки 20. Компенсатор также содержит упор, выполненный в виде ввёрнутого в подвижный орган 11 винта 21, расположенного параллельно ходовому винту 6 т.е. соосно со штоком 19, и взаимодействуйщего со штоком 19. На.винте 21 закреплен (или нанесен) лимб 22, а на подвижном органе 11 установлена стрелка 23. От самопроизвольного отвинчивания винта 21 предохраняет контргайка 24. Подвижный орган 11 выполнен в виде корпуса (каретки) с пазом 25 для размещения штампов 14. Привод работает следующим образом. Ленточный материал 15 подается из рулонницы-1.2 подающими валками 13 в рабочую зону штампа 14 на шаг подачи,с В штампе 14 осуществляется вырубка заготовки из материала 15. Затем включают двигатель 4, который через механизм. 5 реверса, шестерни 9 и 8, ходовой винт 6, гайку 7, вилку 20, шток 19 силового цилиндра 16 приводит в движение подвижный орган 11 по направляющим 10.. Одновременно подается сигнал на включение силового цилиндра 16. Сжатый воздух подается в полость В силового цилиндра 16. Под действием сжатого воздуха корпус силового цилиндра 16 перемещается вправо и перемещает в зтом направлении подвижный орган 11. Затем винт 21 воздействует на шток 19, и рабочий орган 11 начинает, перемещаться совместно с силовым цилиндром 16 вправо на заданную величину. Подвижный орган 11 при работе силового цилиндра 16 перемещается относительно гайки 7 на величину люфта преобразующего механизма. Величина этого перемещения устанавливается при помощи лимба 22 и стрелки 23 при вращении винта 21.i Затем осуществляется вырубка следующей заготовки из материала 15, и вновь включают двигатель, который через преобразующий механизм и компенсатор перемещает подвижный орган 11 на заданную величину вправо. После вырубки заготовок в одном ряду подается сигнал на включение подающих валков 13, которые перемещают материал 15 на заданный шаг в вертикальном направлении. Затем срабатывает механизм 5 реверса и подает сигнал на реверсивное движение силового цилиндра 16. Сжатый воздух подается в полость Г силового цилиндра 16, ::орпус которого пёр емещается .влево до взаимодействия поршня 17 с дном (крышкой) корпуса силового цилиндра 16. Затем цикл-повторяется. i Эффект от использования привода заключается в увеличении точности получаемых изделий в результате повышения точности подачи. Формула изобретения Привод перемещения подвижного органа рабочей машины, содержащий двигатель, установленный на .основании,, и преобразуняций механизм, связываюций двигатель с подвижным органом через компенсатор люфта, о т л и чающийся тем, что, с целью повышения точности перемещения под- . вижного органа, компенсатор выполнен в виде закрепленных на рабочем opra-t не силового цилиндра со штоком, расположенного эквидистантно в направлении перемешения подвижного органа, и упора, установленного с возможностью регулировочного перемещения в направлении перемещения подвижного органа и взаимодействия со штоком силового цилиндра.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 259036, кл. В 23 Р 15/00, 21.11.67,
2.Авторское свидетельство СССР 283976, кл. В 21 F 11/00,
В 26 b 5/22, 23.07.69 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для изготовления деталей из ленточного материала | 1982 |
|
SU1098622A1 |
| Устройство для штамповки деталей из длинномерного материала | 1988 |
|
SU1574328A1 |
| Установка для обработки длинномерного материала | 1988 |
|
SU1538967A1 |
| Автоматическая линия изготовления гнутых профилей | 1985 |
|
SU1299648A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Устройство для зигзагообразной штамповки | 1979 |
|
SU948496A2 |
| Устройство для подачи полосового и ленточного материала в зону обработки | 1985 |
|
SU1378992A1 |
| Устройство для штамповки деталей из ленточного материала | 1988 |
|
SU1590170A1 |
| МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2472951C2 |
| Устройство для вырубки из листа заготовок,расположенных в шахматном порядке | 1979 |
|
SU839123A1 |