Изобретение относится к системам автоматического регулирования объектов второго порядка с отсутствием естественного демпфирования и используется для построения унифицированной системы регулирования на пассивных и активных режимах.
Известна система регулирования, содержащая датчик углового положения, корректирующий контур, сервопривод, измеритель линейного ускорения и два интегратора 1.
Однако эта система не обеспечивает унификацию для всех режимов и не может работать на пассивных режимах.
Наиболее близкой к предложенной системе является импульсно-релейная система регулирования 2, содержащая датчик углового положения, сумматор, логический блок, усилитель и исполнительный орган. Эта система используется для управления положением объекта второго порядка с применением релейного исполнительного органа и обеспечивает близкое к минимальному время включения исполнительного органа (ИО).
При этом экономичность достигается за счет того, что . разброс минимального импульса незначителен при достижении переключения в направлении уменьшения рассогласования, управляющие воздействия на исполнительный орган не выдаются, а чистое .запаздывание ИО и запаздывания датчиков .не влияют На величину окончательного предельного цикла, так как исполнительный орган не выключается сигналом рассогласования.
Однако эта система не унифицирована с аппаратурой для регулирования положением объекта на активных режимах и не обеспечивает регулирование пололсения центра масс объекта управления.
Целью изобретения является расширение области применения системы.
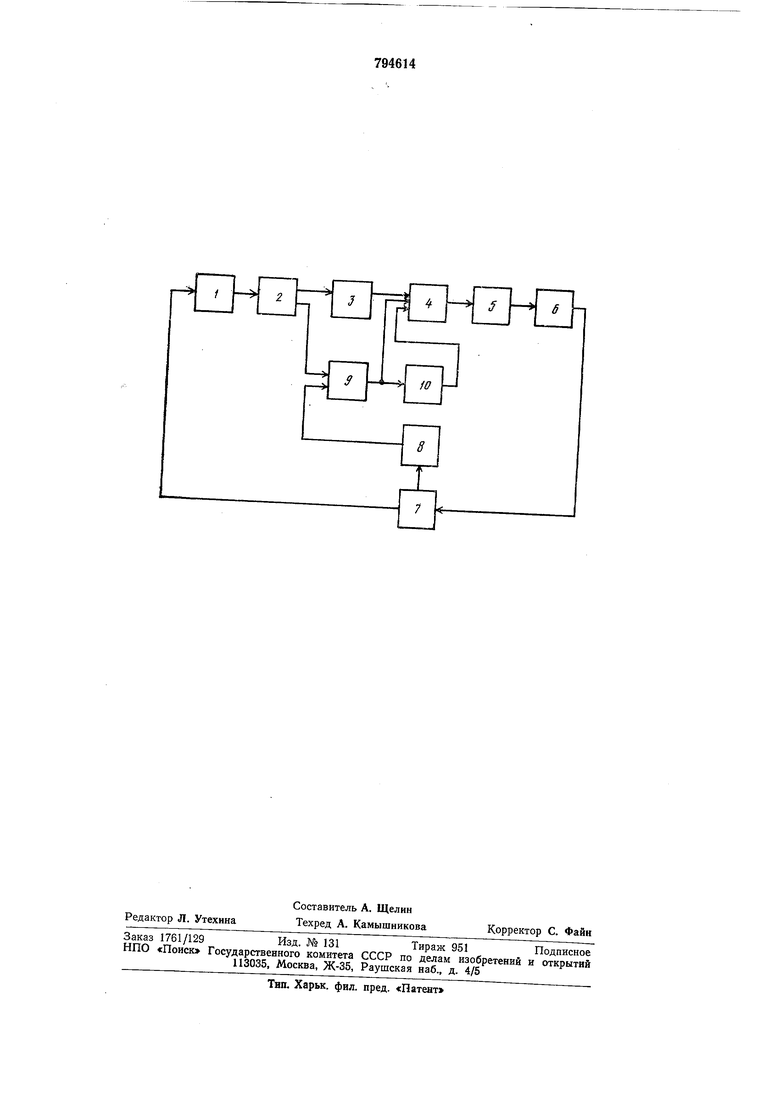
Эта цель достигается тем, что в предложенную импульсно-релейную систему ре5гулирования, содержащую последовательно соединенные сумматор, логический блок, усилитель и исполнительный орган, а также датчик углового положения, введены дифференциатор и последовательно соединенные датчик срабатывания исполнитель0ного органа и два интегратора. Выходы интеграторов подсоединены к первому и второму входам сумматора, к третьему входу которого подключен выход дифференциато5ра, вход которого соединен с первым выходом датчика углового положения, второй выход которого подключен ко второму входу первого Интегратора, а вход датч.ика срабатывания исполнительного органа сое0динеп с исполнительным органом. На чертеже изображена структурная схема предлол енной системы. Она содержит объект регулирования второго порядка 1, датчик углового положення 2, дифференциатор 3, сумматор 4, логический блок 5, усилитель 6, иснолнительный орган 7, датчик срабатывания 8 исполнительного органа, нервый 9 и второй 10 интеграторы. Система работает следующим образом. Под действием возмущений объект регулирования 1 отклоняется на величину а от заданного положения и с первого выхода датчика 2 выдается сигнал t/д Кд а на вход дифференциатора 3, с выхода которого сигнал /д„ поступает на третий вход сумматора 4. Со второго выхода датчика 2 сигнал поступает на второй вход интегратора 9 и € его выхода - на первый вход сумматора 4 и на вход интегратора W, с выхода которого сигнал поступает на второй вход сумматора 4. В результате на выходе сумматора 4 образуется сигнал Ui,, У, /{-,. а -Ь /Г. .а +«,(« + f{,P)dt 4-i-f{,{ + K,P)df,dt,,(I) где /G, ffa., К, K-i и /Сз - коэффициенты усиления; Р - управляющая С выхода сумматора 4 сигнал (7,, поступает на вход логического блока 5, на выходе которого вырабатываются импульсные и релейные сигналы U, причем (U,,), где F - логическая функция. Суть логической функции F состоит в следующем. Если величина сигнала f/в превыщает некоторый уровень И, подается импульс величииой U и длительностью при .превышении второго уровня f/s - импульс .величиной U и длительностью и т. д. При больщих значениях входной величины LB логический блок работает как реле, т. е. на его выходе вырабатывается непрерывный сигнал постоянной величины и. Импульсные сигналы вырабатываются только при увеличении модуля сигнала в. При его уменьщении Иимпульсные сигналы не выдаются. Под действием сигналов U срабатывает исполнительный орган 7. В результате образуется управляющая сила Р и управляющий момент М н осуществляется регулирование углового положения и положения центра масс объекта второго порядка /. Систему со схемой, приведенной на чертеже, в некоторых случаях целесообразно использовать с устройствами 8, 9, 10 и на длительных пассивных режимах для уменьшения возмущений из-за работы исполнительного органа на положение центра масс. И.мпульсно-релейная система рег)О1ирования нозволяет унифицировать аппаратуру системы стабилизации углового положения и полол ения центра масс объекта на активных режимах с аппаратурой для стабилизации углового положения на пассивных режимах. Формула изобретения Имнульсно-релейная система регулирования, содержащая последовательно соедииснные сумматор, логический блок, усилитель и исполнительный орган, а также датчик углового положения, отличающаяс я тем, что, с целью расширения области применения системы, в нее введены дифференциатор и последовательно соединенные датчик срабатывания исполнительного органа и два интегратора, причем выходы интеграторов подсоединены к первому и второму входам сумматора, к третьему входу которого подключен выход дифференциатора, вход которого соединен с первым выходом датчика углового положения, второй выход которого подключен ко второму входу первого интегратора, а вход датчика срабатывания исполнительного qpгана соединен с исполнительным органом. Р1сточникп информации, принятые во внимание при экспертизе: 1.Разыграев А. П. Основы управления. М., «Машиностроение, 1977, с. 267. 2.Старикова М. В. Приближенное исследование импульсно-релейной системы управления. «Автоматика и телемеханика, 1968, № 4 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1982 |
|
SU1101787A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Релейно-импульсный регулятор для объекта второго порядка | 1980 |
|
SU943640A1 |
| Система стабилизации объекта с присоединенным упругим элементом переменной жесткости | 1988 |
|
SU1603340A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Система ориентации и стабилизации | 1981 |
|
SU966669A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120654C1 |
| Импульсный регулятор | 1981 |
|
SU1004969A1 |