(54) УСТРОЙСТВО ПЕРЕНОСА ЗАГОТОВОК
1
Изобретение относится к машиностроению, а именно к механизации и автоматизации транспортирования деталей с одной технологической позиции на другую, в частности, для передачи заготовок между прессами в автоматических линиях.
Известно устройство для параллельного переноса заготовок, содержащее основание, две оппозитные друг другу платформы, каждая из которых шарнирно установлена на штоке силового цилиндра закрепленном На поворотном от привода вале и связана с основанием тягами, образующими с силовым цилиндром шарнирный параллелограмм 1.
Недостатком является то, что тяги, как и во всяком шарнирном параллелограмме, ограничивают угол поворота силового цилиндра, а следовательно, и перемещение платформы с переноси.мой заготовкой, что ограничивает зону обслуживания.
Известно также устройство для переноса заготовок, содержащее основание с приводным валом и закрепленным на нем рычагом, снабженным расположенной соосно приводному валу осью, на которой установлена звездочка со ступицей, платформу, установленную на рычаге на другой оси с жесткозакрепленной соосно оси звездочкой, а также охватывающую обе звездочки цепь 2 . Недостатком известного устройства является то, что жесткий рычаг и цепь пос5 тоянной длины не позволяют изменять расстояние между приводным валом и платформой, что ограничивает зону обслуживания.
Целью изобретения является увеличение
10 зоны обслуживания.
Указанная цель достигается тем, что устройство для переноса заготовок, содержащее основание с приводным валом и закрепленным на нем рычагом, снабженным расположенной соосно приводному валу осью,
15 на которой установлена звездочка со ступицей, платформу, установленную на рычаге на другой оси с жесткозакрепленной соосно оси звездочкой, а также охватывающую обе звездочки цепь, снабжено силовым гидроцилиндром с поршнем и установленным
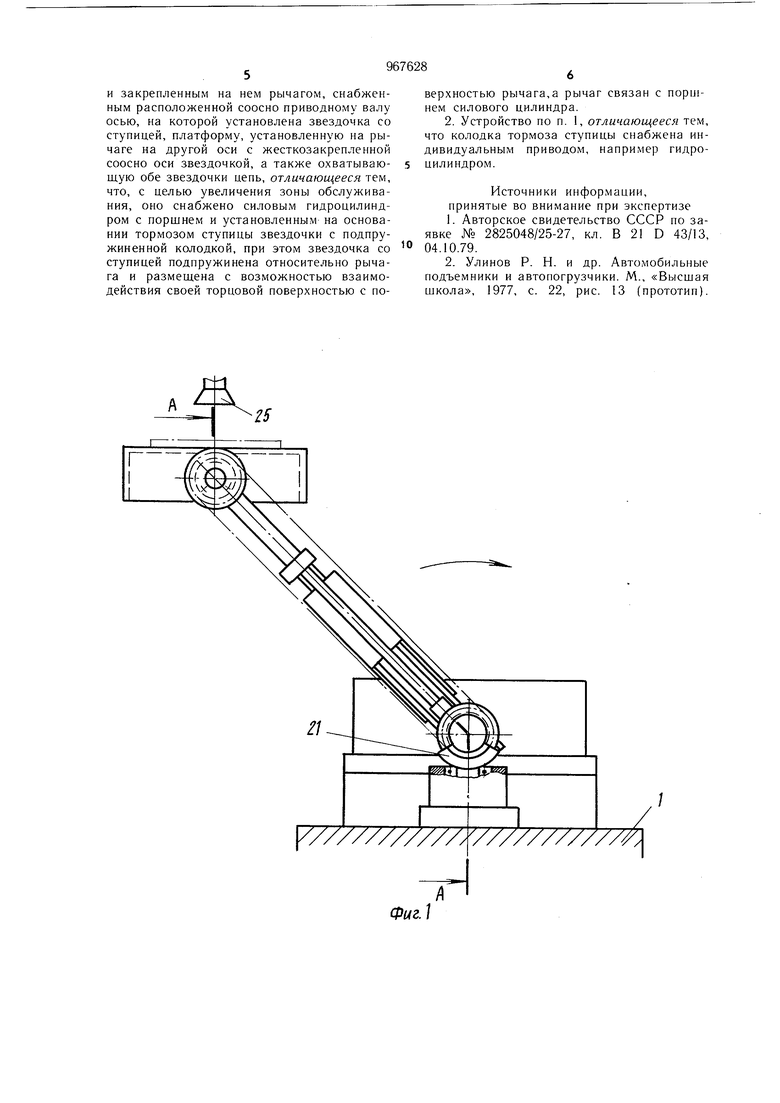
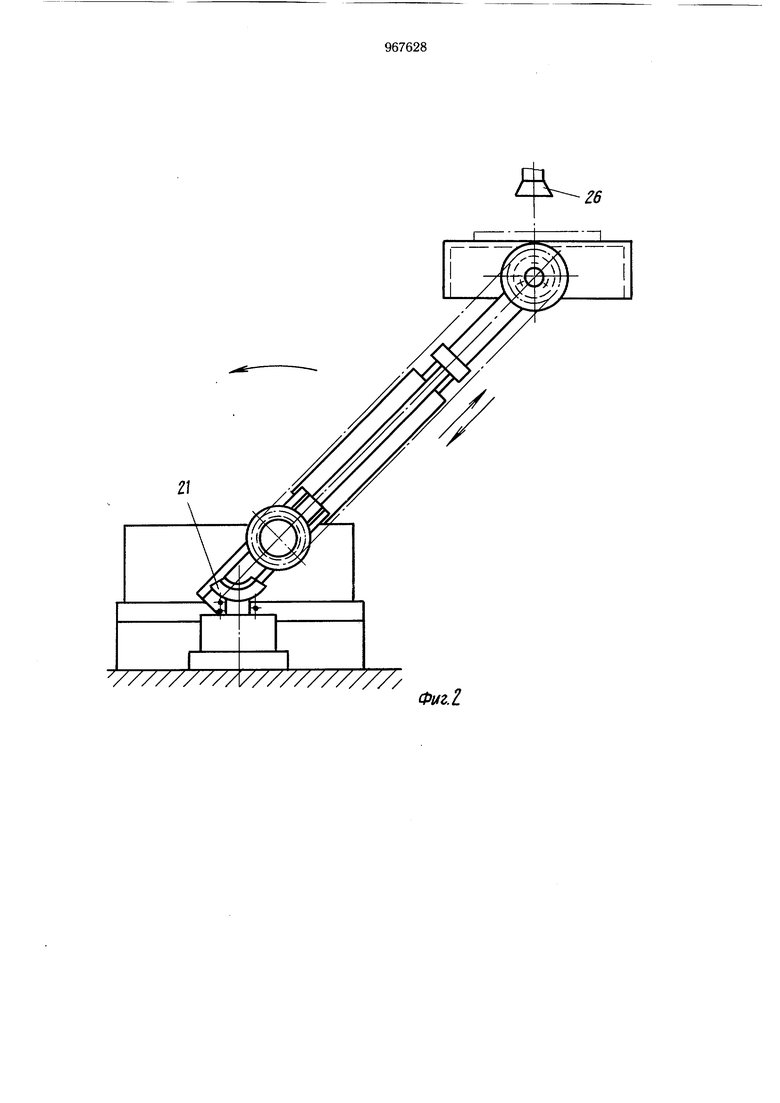
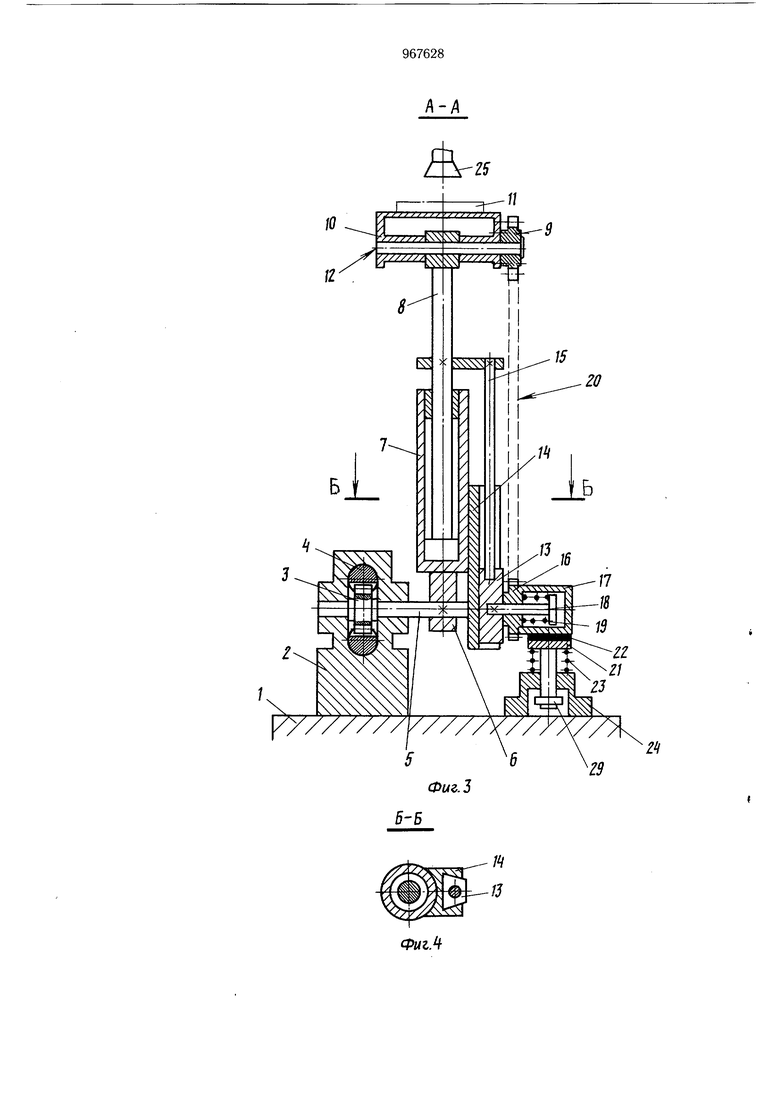
20 на основании тормозом ступицы звездочки с подпружиненной колодкой, при этом звездочка со ступицей подпружинена относительно рычага и размещена с возможностью взаимодействия своей торцовой поверхностью с поверхностью рычага, а рычаг связан с поршнем силового цилиндра. Колодка тормоза ступицы снабжена индивидуальным приводом, например гидроцилиндром. На фиг. 1 изображено устройство, общий вид, когда шток гидроцилиндра находится в. левом положении; на фиг, 2 - то же, шток в правом положении; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б На фиг. 3; на фиг. 5 - тормозная колодка с гидроцилиндром в момент фиксации звездочки со ступицей; на фиг. 6 - то же, звездочка освобождена от фиксации. Устройство содержит основание 1, на котором установлен привод 2 реечно-шестеренны.м механизмом 3, рейкой 4 и приводным валом 5, на котором смонтирован силовой цилиндр 6 с корпусом 7 и штоком 8. Звездочка 9 жестко соединена с платформой 10, предназначенной для параллельного переноса деталей 11, которая шарнирно установлена с возможностью поворота вокруг оси 12 на штоке 8 силового цилиндра 6. Ползун 13 смонтирован с возможностью перемещения в направляющих 14, закрепленных на корпусе 7 силового цилиндра 6 параллельно его продольной оси, и соединен при помощи штанги 15 со штоком 8 силового цилиндра 6. Звездочка 16 со ступицей 17 смонтирована на ползуне 13 с возможностью поворота относительно него на оси 18 и прижата к ползуну 13 пружиной 19. Цепь 20 охватывает обе звездочки 9 и 16. На основании 1 установлена тормозная колодка 21 с фрикционной накладкой 22, которая пружиной 23 отжимается вверх в своей направляющей 24. Звездочки 9 и 16 и цепь 20 образуют блочно-шарнирный параллелограмм. Схват 25 промышленного робота находится на позиции загрузки платформы передаваемой заготовкой, схват 26 - На позиции взятия заготовки с платформы и передачи ее на следующую технологическую операцию. Тормозная колодка 21 может иметь индивидуальныи привод, например гидроцилиндр 27. В этом случае тормозная колодка 21 вместе с пружиной 23 крепится непосредственно На штоке 28 гидроцилиндра 27, а гидроцилиндр 27 монтируется на основании 1 (фиг. 5 и 6). Тормозная колодка 21 имеет для регулирования и ограничения подъема регулировочную гайку 29. Устройство работает следующим образом. После того как схват 25 промышленного робота положит передаваемую деталь 11 на платформу 10, включается привод 2 и реечно-шестеренный механизм 3 при помощи рейки 4 и приводного вала 5 производит поворот силового цилиндра 6. При повороте звездочка 16 со ступицей 17 соосна оси поворота силового цилиндра 6. Пружина 23 прижимает тормозную колодку 21 к ступице 17 звездочки 18.Таким образом, звездочка 16 стопорится и остается неподвижной относительно основания 1. Силовой цилиндр 6 вместе с платформой 10 и ползуном 13 поворачиваются относительно звездочки 16 со ступицей. Усилие пружины 19 выбрано таким, что звездочка 16 пробуксовывает относительно ползуна 13, оставаясь неподвижной. При повороте силового цилиндра нижняя ветвь цепи 20, обкатываясь по заторможенной звездочке 16, поворачивает звездочку 9 вместе с платформой 10 относительно ее оси 12 и силового цилиндра так, что платформа 10 вместе с переносимой деталью 11 занимает постоянно во время поворота горизонтальное положение. После окончания поворота на заданный угол, в случае надобности, шток 8 силового цилиндра 6 с платформой 10 выдвигается на нужную величину. Вместе со штоком 8 двигается штанга 15, соединенная с ползуном 13, на котором сидит звездочка 16. Ползун 13 движется в направляюших 14 корпуса 8 силового цилиндра. Во время движения относительно корпуса цилиндра звездочка 16 со ступицей 17 отходит от тормозной колодки 21 и удерживается относительно ползуна пружиной 19, которая прижимает ее к ползуну. Таким образом, платформа 10 посредством заторможенной звездочки 16 и цепи 20 удерживается в фиксированном горизонтальном положении как при выдвижении штока, так и при его ходе назад. После того как платформа 10 займет заданное положение, другой промышленный робот схватом 26 берет деталь 11 и переносит на следующую технологическую позицию, после чего платформа 10 штоком 8 возвращается в исходное положение. В крайнем нижнем положении ступица 17 звездочки 16 упирается в тормозную колодку 21, осаживает ее вниз в направляющей 24, сжимая пружину 28. Ось звездочки 16 становится точно по оси поворота силового цилиндра 6. После этого происходит поворот силового цилиндра в обратную сторону. Работа узла и деталей точно такая же, как и при повороте вперед. Далее цикл повторяется. В случае, когда тормозная колодка 21 имеет индивидуальный привод, например гидроцилиндр 27, последний работает в согласованном цикле с работой силового цилиндра 6 и привода 2 поворота. Устройство для переноса заготовок между прессами позволяет по сравнению с известным обслуживать технологическое оборудование на различных расстояниях от устроиства и на различных уровнях по высоте. Это увеличивает зону обслуживания и улучшает удобство обслуживания прессов. Формула изобретения 1. Устройство для переноса заготовок, содержащее основание с приводным валом
и закрепленным на нем рычагом, снабженным расположенной соосно приводному валу осью, на которой установлена звездочка со ступицей, платформу, установленную на рычаге на другой оси с жесткозакрепленной соосно оси звездочкой, а также охватывающую обе звездочки цепь, отличающееся тем, что, с целью увеличения зоны обслуживания, оно снабжено силовым гидроцилиндром с поршнем и установленным на основании тормозом ступицы звездочки с подпружиненной колодкой, при этом звездочка со ступицей подпружинена относительно рычага и размещена с возможностью взаимодействия своей торцовой поверхностью с поверхностью рычага,а рычаг связан с силового цилиндра.
2. Устройство по п. 1, отличающееся тем, что колодка тормоза ступицы снабжена индивидуальным приводом, например гидроцилиндром.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке № 2825048/25-27, кл. В 21 D 43/13, 04.10.79.
2.Улинов Р. Н. и др. Автомобильные подъемники и автопогрузчики. М., «Высщая школа, 1977, с. 22, рис. 13 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса заготовок | 1983 |
|
SU1100030A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Устройство для переноса заготовок | 1983 |
|
SU1260075A1 |
| Шаговый транспортер для поточных линий | 1980 |
|
SU925610A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Автоматический комплекс для сборки обуви | 1985 |
|
SU1384315A1 |
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| Стенд для динамических и обкаточных испытаний колесно-моторных блоков локомотивов | 1982 |
|
SU1133491A1 |


Ж
26
20
Фи.З
