(54) ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ФОТОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
Изобретение касается контроля солнечных батарей и может быть использовано на заводах массового производства солнечных батарей для автоматической сортировки под облучением по электрическим параметрам фотоэлектрических преобразователей солнечных батарей.
Известен полуавтомат, для контроля и сортировки фотоэлектрических преобразователей, содержащий станину с закрепленным на ней осветителем, стол с электро- контактным прижимом, установленные под осветителем, оптический фильтр, расположенный между осветителем и столом 1.
Недостатком такого полуавтомата является невысокая производительность иэ- за ручной рассортировки фотоэлектрических преобразователей.
Целью изобретения является повышение производительности автомата.
Указанная цель достигается тем, что полуавтомат для контроля и сортировки фотоэлектрических преобразователей, содержащий станину с закрепленным на ней
осветителем, стол с электроконтактным прижимом, установленные под осветителем, оптический фильтр, расположенный между осветителем и столом, согласно изобретению, имеет механизм опрокидьшания стола и направитель, причем механизм опроквдьтания стола имеет пневмоцилиндр, шток которого шарнирно связан со столом, а другой конец его шарнирно связан со станиной.
10
Кроме того, направитель имеет бункер, наклонные раздвоенные желоба и электромагнитный распределитель, причем наклонные желоба расположены над бункером, а в месте раздвоения размещены электро15магнитные распределители,
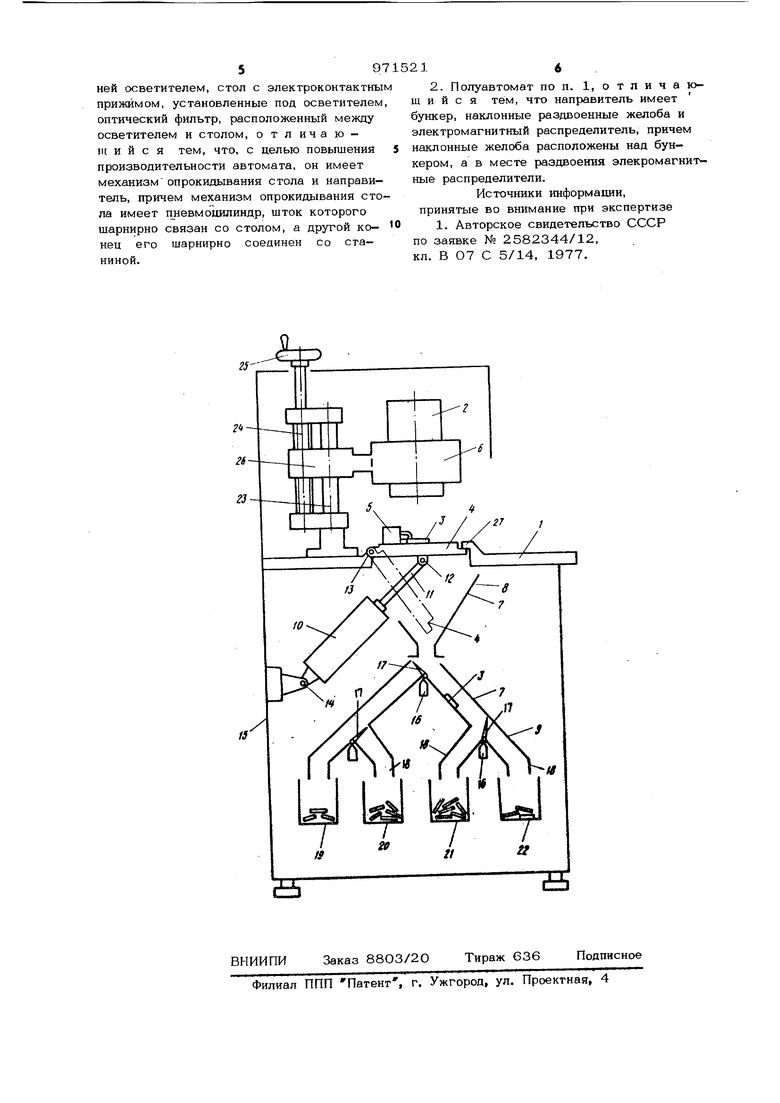
На чертеже изображен полуавтомат, поперечное сечение.
Полуавтомат для контроля и сортиров20ки фотоэлектрических преобразователей содержит станину 1, над которой крепится осветитель.2 для облучения фотоэлектрических преобразователей 3, стол 4 с элетсп роконтакгным прижимом 5, установленные под осветителем 2,, оптический фильтр 6, расположенный между осветителем 2 и столом 4, направитель 7, который состоит из бункера 8 и наклонного раздвоенного желоба 9 и расположен ниже стола 4. Полуавтомат имеет механизм опрокидьта ния этого стола, который содержит пневмоцилиндр 10, подсоединенный через шток 11 к шарниру 12 стола 4, консольно закрепленного через шарнир 13 на станине 1. Другой конец пневмоцилиндра 10 через шарнир 14 закреплен на корпусе 15 на котором жестко смонтирована станина 1.В месте раздвоения желоба 9 размеше ны электромагнитные распределители 16 со стрелками 17. Внизу желоба 9 заканчиваются направляющими патрубками 18, под которыми устанавливаю}х;я емкости 19 - 22 для сбора фотоэлектрических преобразователей. Механизм вертикального перемещения осветителя состоит из стойки 23, ходового винта 24 и махович ка 25. Стойка 23 5шляется направляющей для каретки 26, на которой консольно крепятся фильтр 6 и осветитель 2. Настройка на заданную освещенность преобразователя 3 осуществляется путем вращения маховичка 25, в результате че го винт 24 перемещает каретку 26, на которой осветитель 2 вместе с фильтром 6 меняет свое расстояние относительно преобразователя 3. Позицией 27 обозначен упор верхней части станины 1. Полуавтомат работает следующим образом. Преобразователь 3 помещают на рабочую поверхность стола 4 термостатирования и затем вводят под электрокон-такты прижима 5. В этом положении преобразо- ватель 3 находится под облегчением осветителя 2 и в нем генерируется ток, который подается в блок управления адрес ной системы желобов 9. Этот блок в зависимости от электрических параметров преобразователя 3 подает команду в соот ветствующие распределители 16 для переключения стрелок 17 в определенное псмюжение. Как толысо последние будут переведены в определенное положение, срабатывает пневмош-шиндр 10, который своим штоком 11 через шарнир 12 опрокидывает стол, 4 в нижнее положение. Электроконтакты прижима 5 отлшмаются и преобразователь 3 под действием своег веса соскальзьтает :. по наклонной рабочей поверхности стола 4 в бункер 8. За тем этот преобразователь из 6yincepa 8 под действием сил гравитации соскальзы9721 вает на стрелку 17, которая направляет его в опрецеленный наклонный желоб. Очередная внизу стрелка направляет преобразователь 3 также в соответствующий наклонный желоб, по которому преобразователь попадает в емкость сбора, .где происходит накопление фотоэлектрических преобразователей с определенными электрическими параметрами (рассортировка может осуществляться по току, напряжению, КПД и другим эпектрическии характеристикам). На чертеже показано движение преобразователя 3 из бункера 8 через патрубок 18 в емкость 21. Для направления преобразователя 3 через наклонный желоб в емкость 19 необходимо стрелку 17 переключить в другое положение. После попадания преобразователя 3 в соответствующую емкость срабатьтает пневмоцилиндр 10, который своим што- ком поворачивает стол 4 из наклонного в Горизонтальное положение. В этом случае стол своим краем упирается в упор 27. Стол 4 готов для контроля следующего преобразователя 3, Сортировка очередного преобразователя осуществляется аналогичным образом. Если группу таких преобразователей, накопленную в емкости 21, требуется рассортировать по КПД на более узкий диапазон сортировки, тогда эти преобразователи пропускают вторично через полуавтомат и сортируют, как указано вьпде, для чего предварительно блок управления адресной системы переключают на более узкий диапазон сортировки (например, сортировка по КПД идет до десятых долей). Наличие в предлагаемом полуавтомате опрокидывающего стол механизма и напра- вителя с электромагнитными распределителями позволяет автоматизировать раз, грузку фотоэлектрических преобразователей со стола термостатирования и сортировку их по электрическим параметрам, что дает возможность в зависимости от конструкции фотоэлектрических преобразователей повысить производительность в 2 - 4 раза. Кроме того, по сравнению с роторными аналогами рассортировки существенно повышается надежность и упрощается конструкция полуавтомата. , Формула изобретения 1. Полуавтомат для контроля и сортировки фотоэлектрических преобразователей, содержащий станину с закрепленным на
ней осветитепем, стол с электроконтактным прижимом, установленные под осветитепем, оптический фильтр, расположенный между осветителем и столом, отличаюIU и и с я тем, что, с целью повышения 5 производительности автомата, он имеет механизм опрокидывания стола и направитель, причем механизм опрокидывания стола имеет пневмоцилиндр, шток которого шарнирно связан со столом, а другой ко- О нец его шарнирно соединен со станиной.
2. Полуавтомат по п. 1, о т л и ч а ющ и и с я , что направитель имеет бункер, наклонные раздвоенные желоба и электромагнитный распределитель, причем наклонные желоба расположены над бункером, а в месте раздвоения элекромагнитные распределители.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 2582344/12, кл. В 07 С 5/14, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Стенд для контроля блок- элементов солнечных батарей | 1978 |
|
SU787773A1 |
| СПОСОБ СОРТИРОВКИ ТВЕРДЫХ ОТХОДОВ ПРОИЗВОДСТВА И ПОТРЕБЛЕНИЯ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277984C2 |
| Устройство для сортировки мячей | 1955 |
|
SU106047A1 |
| Автомат для многодиапазонной сортировкидЕТАлЕй | 1978 |
|
SU816575A1 |
| СТАНОК ДЛЯ СВЕРЛЕНИЯ ОТВЕРСТИЙ В ОБУВНОЙ КОЛОДКЕ И ЗАПРЕССОВКИ В НИХ ВТУЛОК | 1966 |
|
SU178473A1 |
| ПОЛУАВТОМАТ ДЛЯ ПОДШЛИФОВКИ МЕСТА КЛЕЙМЕНИЯ В РЕЗИНОВЫХ ПОДОШВАХ | 1968 |
|
SU211358A1 |
| ПОЛУАВТОМАТ ДЛЯ ПОДГОТОВКИ МЕСТА КЛЕЙМЕНИЯ НА | 1973 |
|
SU384515A1 |
| Многопозиционный сборочный полуавтомат | 1990 |
|
SU1812050A1 |
| Полуавтомат для контроля и отбраковки ламп накаливания | 1982 |
|
SU1121722A1 |
