1
Изобретение относится к сортировке деталей по размерам и можетбыть использовано, например в подшипниковой промышленности для сортировки сверхминиатюрных колец.
Известен автомат для сортировки деталей, содержащий преобразователь линейных перемещений в дискретный электрический сигнал, электронный .блок запоминания, воспринимающий сигналы преобразователя, электромагнитный сортировщик, исполняющий команды блока запоминания, врашающийся ротор для транспортировки деталей по столу сортировщика, расположенному под устройством, через позицию контроля l.
В известном автомате ротор выполнен с пазами, в которые подаются из бункера детали типа роликов (шариков и ротор перемещает детали по столу сортировщика.
Недостатком известного автомата является невозможность сортировать в нем кольца сверхминиатюрных подшипников ввиду того, что при загрузке деталей из бункера в пазы ротора невозможно предотвратить появление на кольцах поверхностных повреж дений в виде забоин, потертостей и
т.п. Наличие бункерд также неизбежно приводит к повреждению поверхности колец.
Цель изобретения - расширен-ие технологических возможностей автомата, а именно, обеспечение возможности сортировки колец ВЫСОКОТОЧ НЫХ
приборных подшипников.
у
0 Указанная цель достигается тем, что в автомате, содер:кшцем станину с горизонтальным неподвижным столом, установленный над ним поворотный транспортируклций механизм с приводом,
5 узел контроля, преобразователь линейных перемещений, электронный запоминающий блок и сорти ровочный механизм, поворотный транспортирующий механизм имеет вертикальную колонну
0 с размещенной на верхнем конце.горизонтальной крестовиной, закрепленные на ней сменные спицы, нижний конец которых расположен над неподвижным столом, два закрепленных на столе
5 кулака и смонтированный на колонне отсекатель, состоящий из ..расположенных под каждой спицей на разных уровнях двух пар подпружиненных рычагов, кинематически связанных с кулаками
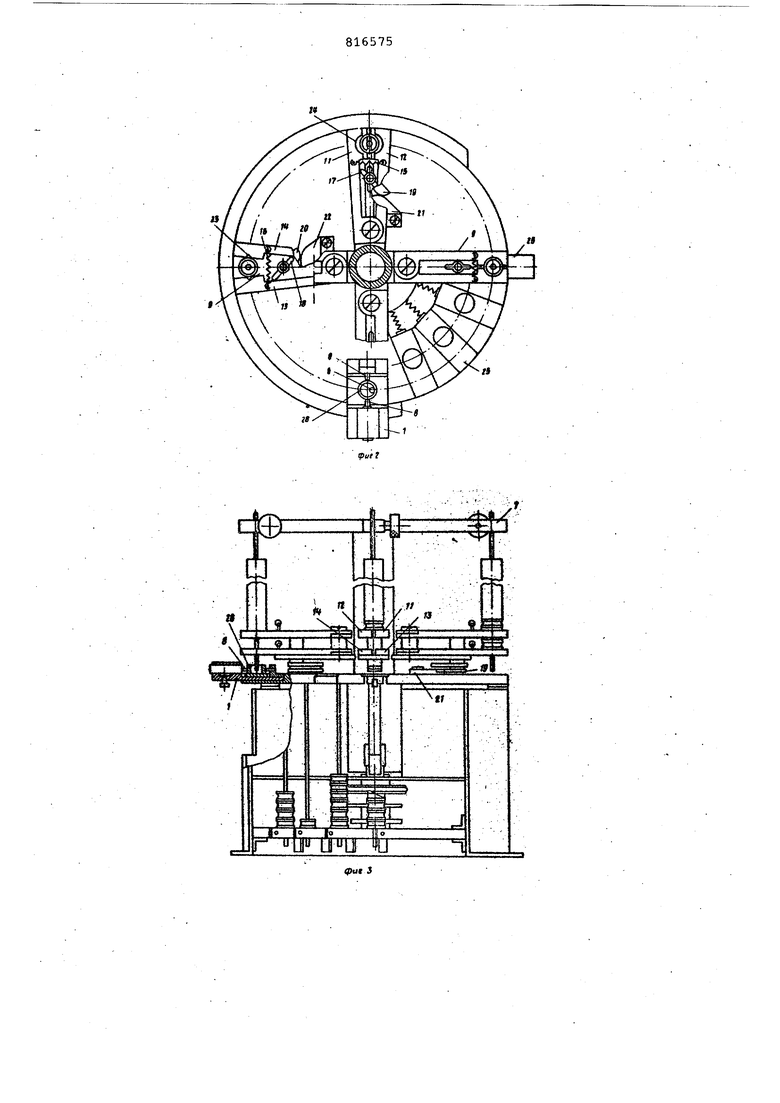
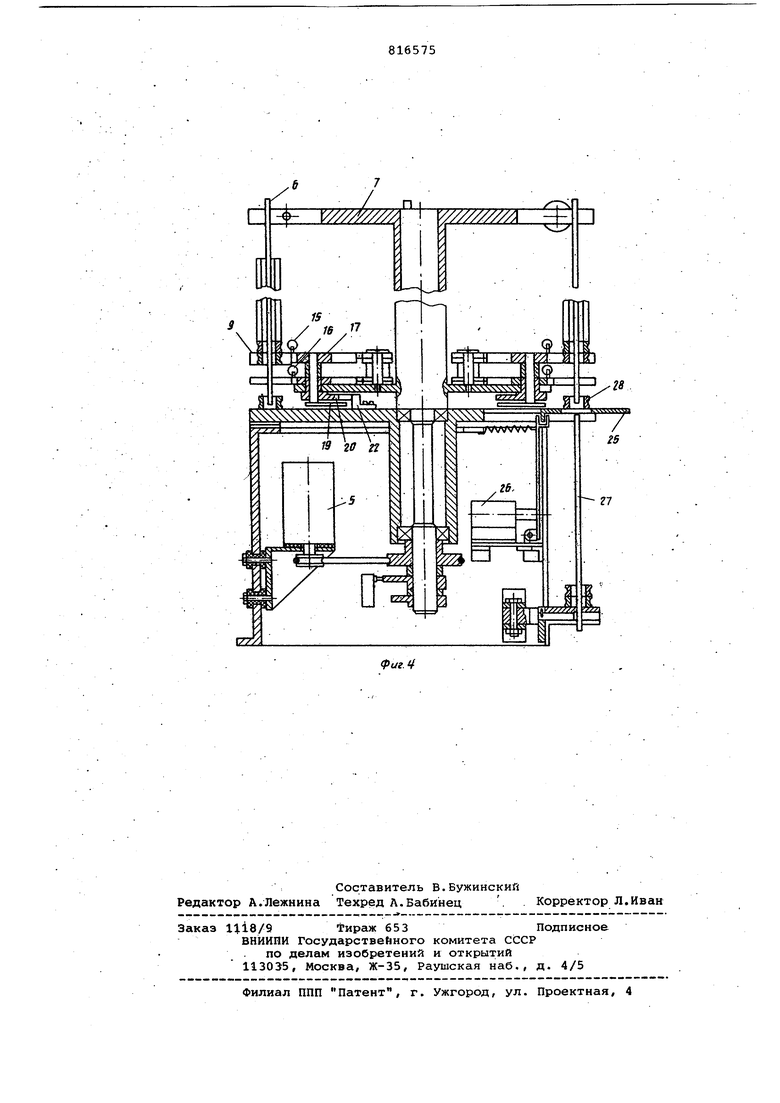
0 посредством рычажной передачи. На фиг. 1 изображен предлагаемыйавтомат, общий вид; на фиг. 2 - отсекатель, вид сверху; на фиг. 3 разрез по позиции контроля; на фиг. 4 - разрез по позиции загрузки с/и сортировки. Автомат содержит преобразователь 1 линейных перемещений в дискретный „электрический сигнал, электронный, блок 2 запоминания, воспринимающий сигналы преобразователя 1, стол 3, механизм 4 для транспортировки деталей по столу 3, привод 5. Механизм 4 транспортирования снабжен сменяемыми спицами б, закрепленными верхними концами на крестовине 7, а нижними концами транспортирующие детали по столу 3 через позицию контроля,в которой установлены наконечники 8 преобразователя 1 линейНЕлх перемещений. Детали отделяются по одному на каходой спице б отсекателя 9,- установленными перпендикулярно поворот- ной колонне 10. Каждый отсекатель 9 выполнен в ви де верхнего и нижнего узлов, расположенных друг над другом. Каждый узе состоит из двух рычагов 11 и 12, 13 и 14, стянутых попарно пружинами 15 и 16, между каждой парой рычагов 11 и 12, 13 и 14 установлены кулачки 17 и 18, на одном валике с которыми находятся рьочаги 19 и 20, взаимодействующие с установленными неподвижно кулаками 21 и 22. С верхней парой ры чагов 11 и 12 взаимодействует кулак 21,С нижней парой рычагов 13 и 14 кулак 22. Между верхней и нижней парами рычагов 11 и 12, 13 и 14 выдержано расстояние, большее сортируемых деталей. Рычаги 13 и 14 нижней пары выполнены с выемками 23, соответству щими диаметру спицы 6. Между рьпагами 13 и 14 в сведенном положении заж мается спица 6, разведенное положени соответствует расстоянию, достаточно му для прохождения детали. Верхняя пара рычагов 11 и 12 выполнена с выемками 24, размер которых соответствует apyжнoмy диаметру деталей. В сведенном положении между рычагами 11 и 12 зажимается контролируемая де таль . Сортировочный механизм содержит , заслонки 25 с отверстиями, размещен ные в радиальных пазах стола 3. Зас лонки 25 Приводятся в движение элек ромагнитами 26. Под заслонкой находятся элементы для накапливания от сортированных деталей в виде приемных сПиЦ 27. Автомат функционирует следующим образом. На крестовину 7 устанавливают см ные спицы 6 с находящимися на них Д талями 28, котсфые удерживаются на спицах б отсекателями 9. Колонна 10 с крестовиной 7 приводится во враще ние от привода 5, при этом каждая спица б последовательно проходит зону выдачи одной детали, зону контро-; ля, зону сортировки. Затем цикл повторяется. В зоне вьщачи одной детали вначале от кулака 21 разводится верхняя пара рычагов 11 и 12. При этом весь столб деталей, находящийся на спице б, соскальзывает вниз и устанавливается на нижней паре рычагов 13 и 14, затем рычажок 19 сходит с кулака 21 и пара рычагов 11 и 12 смыкается,зажимая следующую деталь в выемках 24. При дальнейшем движении колонны 10 срабатывает нижняя пара рычагов 13 и 14 от кулака 22 и деталь соскальзывает по спице вниз до стола 3. После этого рычажок 20 сходит с кулака 22 и 13 и 14 смыкаются, зажимая спицуб в выемках 23, чем обеспечивается высокая жесткость спицы б,исключающая погрешности от неравномерного транспортирования детали через позицию контроля, в которой деталь оказывается между наконечниками 8 преобразователя 1 линейных перемещений в дискретный электрический сигнал. Электрический, дискретный сигнал, соответствующий размеру детали, поступает в электронный блок 2 апоминания. Кольца приборных подшипников имеют весьма малую массу и в процессе измерения находятся мехаду наконечниками 8 в подвешенном состоянии с зазором 0,06-0,08 мм от стола 3, поскольку наконечники имеют сферичес- кие Поверхности и входят в дорожку качения колец. При дальнейшем вращении колонны 10 спица б транспортирует деталь в зону сортировки, где срабатывает один из электромагнитов 26, и переводит заслонку 25 в положение, при котором под деталью открывается отверстие,, через которое она проваливается, сходя со спицы б на спицу 27. После того, как на спицах б запас деталей кончится, автомат останавливают, пустые спицы б снимают и вновь устанавливают спицы с деталями, подлежащими рассортировке. Предлагаемый автомат позволяет за счет совмещения функций спиц, используемых одновременно как магазин и как транспортирующий орган, полностью исключить возможность повреждения колец высокоточных приборных шарикоподшипников в процессе автоматической сортировки. Формула изобретения Автомат для многодиапазонной сортировки деталей, содержащий станину с горизонтальным неподвижным столом, установленный над ним поворотный транспортирующий механизм с Приводом, узел контроля, преобразователь линейных перемещений, электронный запоминающий блок и сортировочный механизм, о т л и ч а ю ц .и и с я тем, что, с целью расширения технологических возможностей, поворотный транопортирукндий механизм имеет вертикадьную колонну с размещенной на верхнем конце горизонтальной крестовиной, закрепленные на ней сменные спицы, нижний конец которых расположен над неподвижным столом, два закрепленных
на столе кулака и смонтированный на колонне отсекатель, состоящий из расположенных под каждой спицей на разных уровнях двух пар подпружиненных рычагов, кинематически связанных с кулаками посредством рычажной передачи.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 257763, кл. G 01 В, 5/08, 1966.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и сортировки многогранных пластин | 1981 |
|
SU1079309A1 |
| Автомат для контроля и сортировки изделий цилиндрической формы | 1985 |
|
SU1359006A1 |
| Многопозиционный автомат для контроля и сортировки цилиндрических деталей | 1980 |
|
SU961796A1 |
| Контрольно-сортировочный автомат для цилиндрических и сферических деталей | 1983 |
|
SU1292850A1 |
| Автомат для измерения и сортировки деталей по наружным размерам | 1938 |
|
SU57813A1 |
| Автомат для установки упругих колец в наружные канавки базовых деталей | 1980 |
|
SU904972A1 |
| Автомат для контроля и сортировки цилиндрических деталей | 1987 |
|
SU1443978A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| Автомат для сортировки деталей,имеющих форму тел вращения | 1982 |
|
SU1009538A1 |
| АВТОМАТ ДЛЯ ОБРАБОТКИ ПЛОСКИХ МАЛОГАБАРИТНЫХДЕТАЛЕЙ | 1968 |
|
SU222133A1 |
j-znm y
и
а
а
