Фиг. 2
Изобретение относится к технологическому оборудованию и может быть использовано в машиностроении, в частности для сборки ролика стеклоподъемника автомобиля.
Цель изобретения - повышение производительности и надежности за счет ориентации устанавливаемой детали в процессе сопряжения с одновременным приложением к ней осевого усилия,
На фиг, 1 изображен сборочный полуавтомат, общий вид; на фиг. 2 - сборочный механизм.
Многопозиционный сборочный автомат (фиг. 1) содержит станину 1 и многопозици- онный поворотный стол 2 с ложементами 3, вокруг которого размещены технологические устройства и сборочные механизмы. Каждый из сборочных механизмов (фиг.2) выполнен в виде пневмоцилиндра 4, на штоке которого закреплен толкатель 5, и фиксатора 6, закрепленного на станине 1. Толкатель
5 снабжен двумя регулируемыми упорами 7 и подпружиненным прижимом 8. Фиксатор
6 выполнен в виде двух рычагов 9, соединен- ных между собой пружиной сжатия 10.
Полуавтомат работает следующим образом.
На соответствующей позиции стола 2 с помощью питателя устанавливаемая деталь 11 подается в фиксатор 6 и размещается на горизонтальных опорных поверхностях ры
0
5
5
0
0
чагов 9 соосно с прижимом 8. При срабатывании пневмоцилиндра 4 толкатели 5 движутся вниз, и прижим 8 центрирует деталь 11 относительно базовой детали 12, размещенной в ложементе 3 стола. При перемещении толкателя 5 происходит сжатие пружины прижима 8 до тех пор, пока упоры 7 не разведут рычаги ,9. В этот момент прижим 8 резко перемещает деталь 11 вниз и сопрягает ее с деталью 12,
Аналогично осуществляются сборочные операции и на других позициях полуавтомата.
Формула изобретения Многопозиционный сборочный полуавтомат, содержащий станину, поворотный стол и размещенные вокруг него технологические устройства и сборочные механизмы, выполненные в виде подвижного в осевом направлении толкателя с приводом и подпружиненного фиксатора, о т л и ч а ю- щ и и с я тем, что, с целью повышения производительности и надежности, толкателя снабжен двумя жесткими уп;: рзми я прижи- мом, подпружиненным относительно толкателя, а фиксатор выполнен в виде двух одноплечих Г-образных рычагов, соединённых между собой пружиной сжатия и шар- нирно установленных на станине, при этом упомянутые упоры имеют возможность взаимодействия с соответствующим рычагом фиксатора.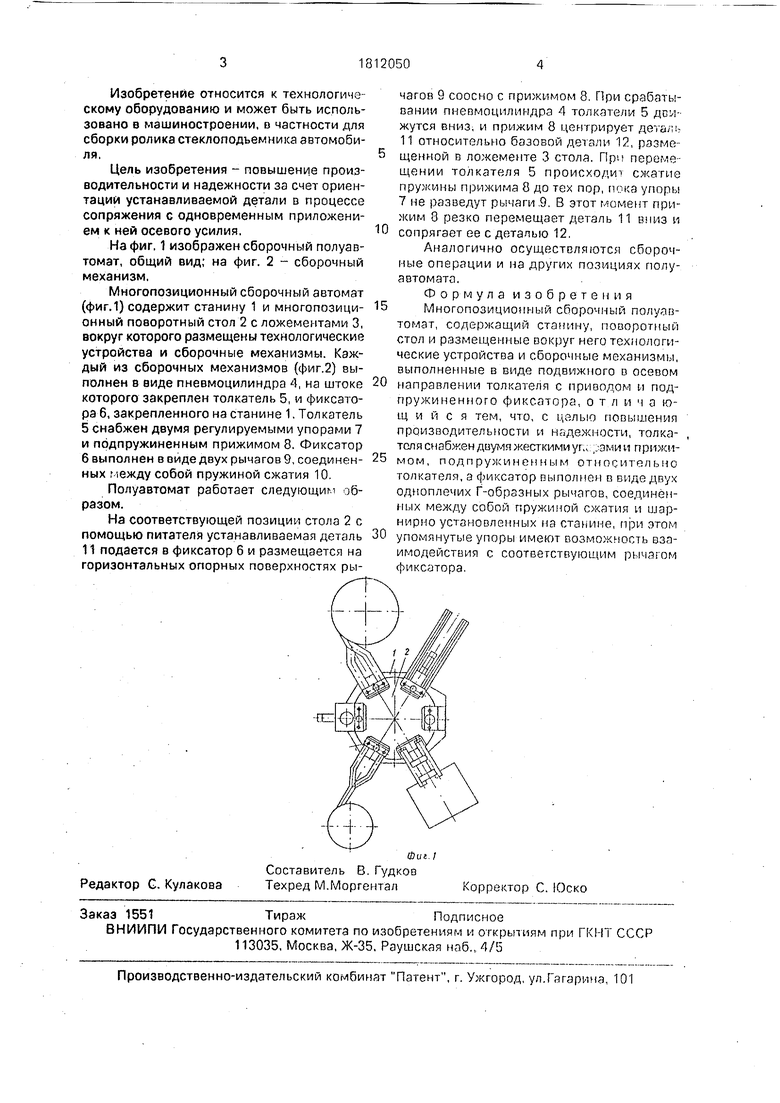
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Автомат для монтажа упругих колец в наружные канавки базовых деталей | 1988 |
|
SU1521549A1 |
| Полуавтомат для сборки изделий типа галетных переключателей | 1981 |
|
SU1069971A1 |
| Полуавтомат для сборки секаторов | 1982 |
|
SU1144830A1 |
| Устройство для сборки | 1987 |
|
SU1407746A1 |
| Полуавтомат для сборки вальцовкой узлов | 1983 |
|
SU1138288A1 |
| Сборочный автомат | 1977 |
|
SU707754A1 |
| Полуавтомат для клепки тормозных колодок | 1981 |
|
SU1165526A1 |
| Автоматизированная линия групповой сборки | 1988 |
|
SU1604564A1 |
| Поточная линия для изготовления сварных конструкций | 1978 |
|
SU770715A1 |
Изобретение относится к машиностроению и позволяет повысить производительность и надежность за счет ориентации устанавливаемой детали в пределе сопряжения, с одновременным приложением к ней осевого усилия. Но каждой из сборочных позиций полуавтомата устанавливаемая деталь 11 питателем подается в фиксатор 6 и размещается на опорных поверхностях рычагов 9, при срабатывании пневмоцилиндра 4 толкатель 5 движется вниз и прижимом 8 ориентирует деталь 11 относительно базовой детали 12. При пере,- мещении толкателя 5 пружина прижима 8 сжимается до тех пор пока упоры 7 не раз- . ведут рычаги 9. В этом момент благодаря сжатой пружине прижим 8 резко перемещает деталь 11 и сопрягает ее с деталью 12.2 ил.
| МНОГОПОЗИЦИОННЫЙ СБОРОЧНЫЙ АВТОМАТ | 1971 |
|
SU435913A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
