(54) ЗАХВАТ IIPOMbHlljlEHHOIO РОБОТА
отверстиях 7 на неподвижном элементе I приводного механизма.
Захват промышленного робота работает следующим образом.
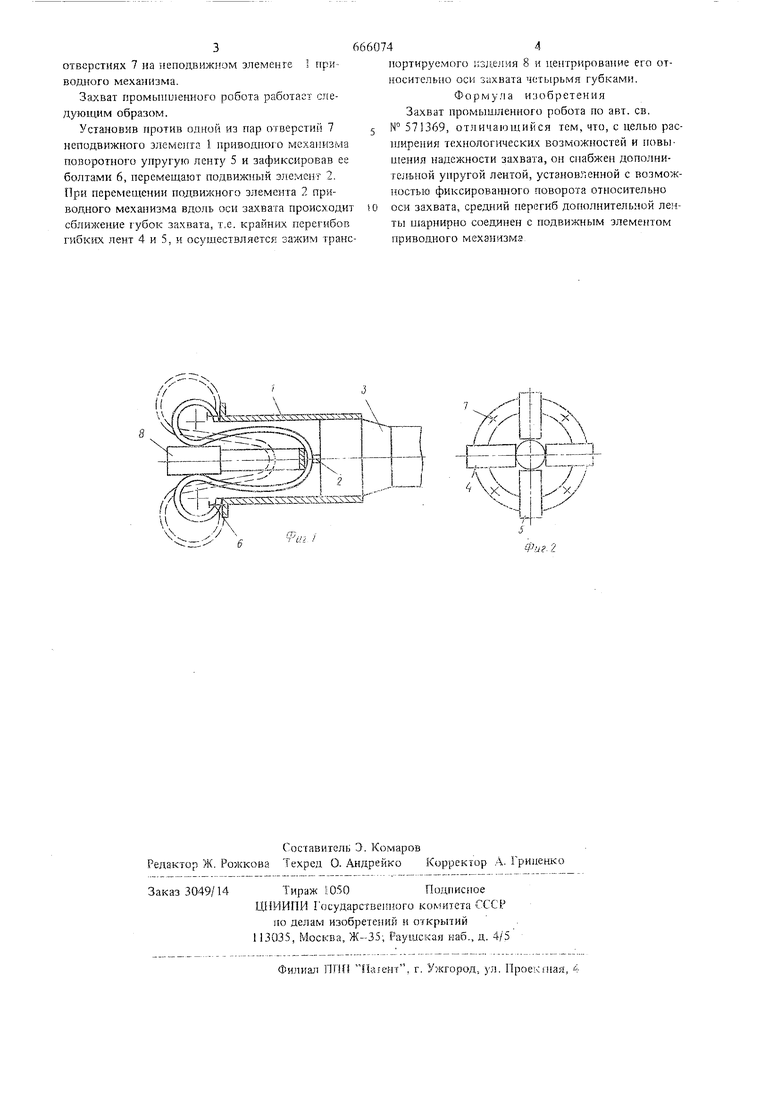
Установив нротив одной из пар отверстий 7 неподвижного элемента 1 приводного механизма новоротного упругую ленту 5 и зафиксировав ее болтами 6, перемещают подвижный элемент 2. При перемещении ПОЛ;БИЖНОГО элемента 2 приводного механизма вдоль оси захвата происходит сближение губок захвата, т.е. крайних перегибов гибких лент 4 и 5, и осуществляется зажим транспортируемого изделия 8 и центрирование его относительно оси захвата четырьмя губками.
Формула изобретения Захват промыщленного робота по авт. св. № 571369, отличающийся тем, что, с целью расширения технологических возможностей и повышения надежности захвата, он снабжен дополнительной упругой лентой, установленной с возможностью фиксированного поворота относительно оси захвата, средний перегиб дополнительной ленты шарнирно соединен с подвижным элементом приводного механизма.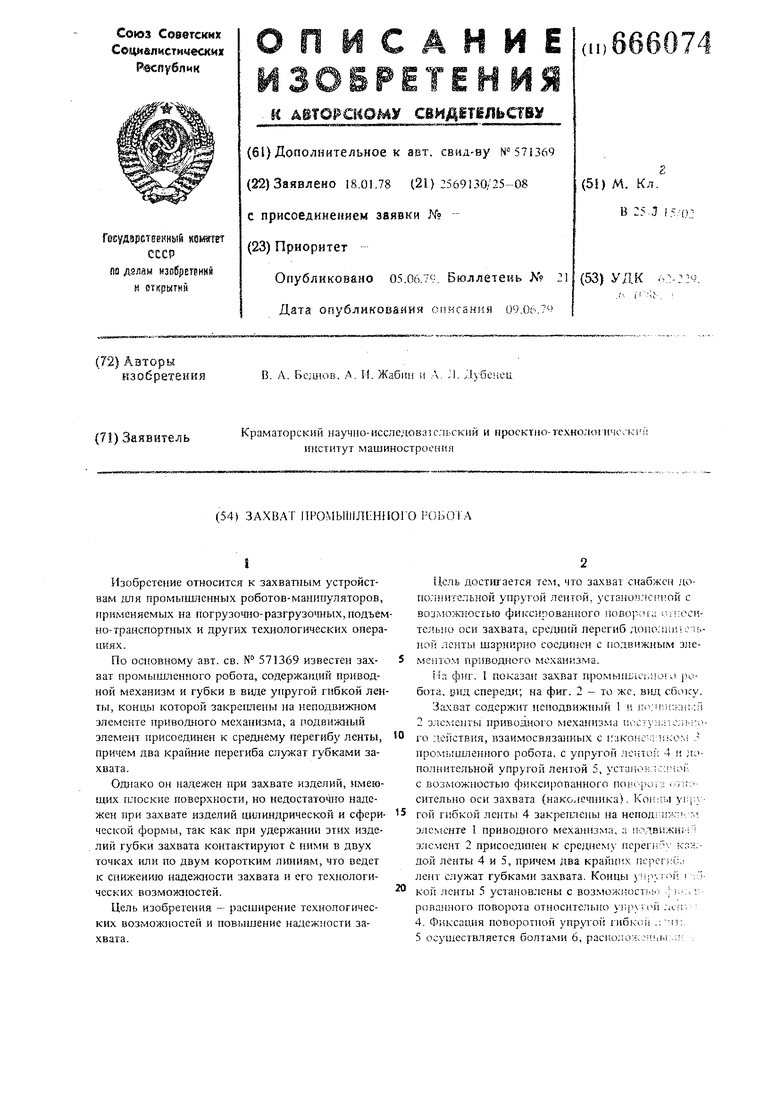
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1978 |
|
SU768634A1 |
| Захват промышленного робота | 1983 |
|
SU1110628A2 |
| Захват промышленного робота | 1981 |
|
SU971648A2 |
| Захват промышленного робота | 1979 |
|
SU781056A2 |
| Захват промышленного робота | 1979 |
|
SU844175A2 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Захватное устройство | 1986 |
|
SU1364474A1 |
| Захват промышленного робота | 1988 |
|
SU1696299A1 |
| Захват промышленного робота | 1988 |
|
SU1645137A1 |
Фиг.1
Фиг- 2
