- П 11 3 5 1В Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват | 1981 |
|
SU960007A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Схват манипулятора для роботизированной сборки сварных конструкций | 1989 |
|
SU1726237A1 |
| Многопозиционное зажимное устройство | 1981 |
|
SU975305A1 |
| Многопозиционный сборочный автомат | 1981 |
|
SU1009692A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
Изобретение относится к роботизированному машиностроительному производству. Целью изобретения является расширение технологических возможностей путем обеспечения захвата группы деталей с заданным их расположением. Захват содержит неподвижную губку 1, в которой по форме захватываемых деталей выполнены сквозные отверстия 2. В губке 1 выполнены направляющие продольные пазы, в которых установлена подвижная губка 4, связанная жестко штоком 7 с приводом 9. В губке 4 выполнены отверстия 5, идентичные отверстиям 2. Захват заполняется с помощью загрузочного устройства группой деталей. Надежное удержание деталей в захвате осуществляется перекрытием профильных отверстий 2 в результате смещения подвижной губки 4 под действием привода 9. Освобождение деталей происходит при смещении губки 4 в обратном направлении при отключении привода 9. Процесс соединения деталей с базовой деталью облегчается работой вибратора 14. 1 з.п. ф-лы, 2 ил.
со
Фиг. г
8 Ю
73 П
Изобретение относится к области роботизированного машиностроительного производства, преимущественно к устройствам для одновременного захвата нескольких деталей с сохранением их взаимного расположения относительно друг друга.
Цель изобретения - расширение технологических возможностей путем обеспечения захвата группы деталей с заданным их расположением
талей в процессе их переноса в сборочную рабочую позицию.
В рабочей позиции захват опускается на сборочное приспособление и фиксируется там с помощью направляющих втулок 18. Благодаря этому достигается необходимая точность соосного расположения профильных отверстий 2 и соответствующих отверстий в базовой детали.
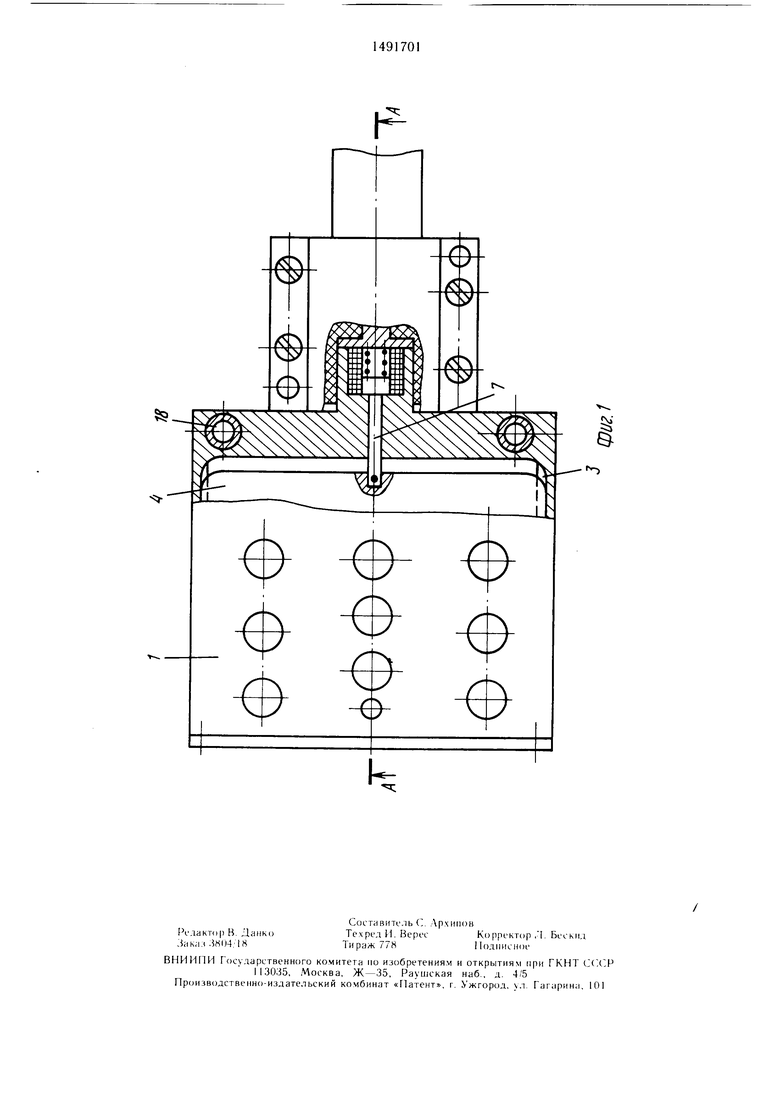
Для установки деталей в базовую детей. В губке 1 выполнены продольные направляющие пазы 3, в которых подвижно установлена вторая зажи.мная губка, выполненная в виде пластины 4 с отверстияНа фиг. 1 дан захват вид сверху; на Ю таль отключают электромагнит 9, губка 4 фиг. 2 - разрез А-А на фиг. 1.смещается влево под действием пружины 10
Многопозиционный захват содержит не- до упора в планку 6. Профили отверстий 2 подвижную губку 1, в которой выполне-и 5 совпадают и присоединяемые детали
ны в заданном расположении сквозные устанавливаются в отверстия базовой де- отверстия 2, размеры и форма которых тали.
определяются профилем захватываемых дета-Для облегчения процесса соединения базовой и присоединяемых деталей, а также для улучшения фиксации захвата со сборочным приспособлением используется вибратор 14, обеспечивающий колебания губ- ми 5, идентичными отверстиям 2. Губка 4 20 ки 1 в пределах зазоров между втулка- удерживается ограничительной планкой 6. ми 18 и соответствующими им фиксатора- К губке 4 жестко прикреплен шток 7, на проти воположном конце которого установлен якорь 8 электромагнита 9, установленный в губке 1 и подпружиненный пружиной 10. Губ ка 1 крепится через упругую прокладку 11 с помощью планки 12 к корпусу 13, жестко связаного с рукой робота. В полости корпуса расположен электромагнитный вибратор 14. фиксируемый крышкой 15, через отверстие которой проходит сердечник 16, связанный 30 но установлена относительно другой губки, с губкой 1. Он подпружинен относитель-отличающийся тем, что, с целью расширения технологических возможностей робота путем обеспечения захвата группы деталей с их заданным возможным расположением, одна из губок выполнена в виде пластины 35 со сквозными отверстиями, профиль и расположение которых определяется профилем
25
ми.
Формула изобретения
. Многопозиционный захват промышленного робота, содержащий корпус, находящиеся в нем зажимные губки с ориентирующими детали элементами, одна из губок связана с приводным штоком и подвижно корпуса пружиной 17. Губка 1 дополнительно снабжена направляющими втулками 18, взаимодействующими с фиксаторами, установ:1енными в сборочной позиции (не показаны).
Многопозиционный захват работает следующим образом.
Для загрузки захвата он переносится промышленным роботом к загрузочному устройству и заполняется группой деталей. После чего к обмотке электромагнита 9 прикладывается рабочее напряжение, при этом под действием электромагнитных сил якорь 8 втягивается внутрь обмотки электро- .магнита, а губка 4, жестко связанная с яко40
и расположением захватываемых деталей, внутри данной губки в направляющих пазах установлена с возможностью перемещения в плоскости, перпендикулярной осям отверстий, подвижная зажимная губка, в которой выполнены сквозные отверстия идентично отверстиям неподвижной губки.
Смещение губки 4 вызывает частичное не-ней приводом и подвижной губкой связарекрытие профильных отверстий 2 губки I,на посредством упругого элемента с вибрачто обеспечивает надежное удержание де-тором.
талей в процессе их переноса в сборочную рабочую позицию.
В рабочей позиции захват опускается на сборочное приспособление и фиксируется там с помощью направляющих втулок 18. Благодаря этому достигается необходимая точность соосного расположения профильных отверстий 2 и соответствующих отверстий в базовой детали.
Для установки деталей в базовую де таль отключают электромагнит 9, губка 4 смещается влево под действием пружины 10
зово же сбор вибр ки ми но у отли
ми.
зовой и присоединяемых деталей, а также для улучшения фиксации захвата со сборочным приспособлением используется вибратор 14, обеспечивающий колебания губ- ки 1 в пределах зазоров между втулка- ми 18 и соответствующими им фиксатора- но установлена относительно другой губки, отличающийся тем, что, с целью расшире
Формула изобретения
. Многопозиционный захват промышленного робота, содержащий корпус, находящиеся в нем зажимные губки с ориентирующими детали элементами, одна из губок связана с приводным штоком и подвиж0
и расположением захватываемых деталей, внутри данной губки в направляющих пазах установлена с возможностью перемещения в плоскости, перпендикулярной осям отверстий, подвижная зажимная губка, в которой выполнены сквозные отверстия идентично отверстиям неподвижной губки.
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
